1.本发明属于医疗设备技术领域,具体地说,尤其涉及一种医疗骨肿瘤用介入式治疗设备。
背景技术:
2.骨肿瘤是发生于骨骼或其附属组织的肿瘤。有良性,恶性之分,良性骨肿瘤易根治,预后良好,恶性骨肿瘤发展迅速,预后不佳,死亡率高。恶性骨肿瘤分为原发性和继发性。从体内其他组织或器官的恶性肿瘤经血液循环、淋巴系统转移至骨骼为继发性恶性骨肿瘤。还有一类病损称瘤样病变,肿瘤样病变的组织不具有肿瘤细胞形态的特点,但其生态和行为都具有肿瘤的破坏性,一般较局限,易根治;目前,对于肿瘤治疗一般都需要使用肿瘤介入穿刺针,肿瘤介入治疗穿刺针刺入血管,将药物输入到并处的主血管,目前穿刺针大多通过医生手动进行操作,完全依靠医生的经验,操作不够准确。
技术实现要素:
3.本发明通过底座和底座上安装的机械臂来调节穿刺针在穿刺时的穿刺方向,通过第四摆件高精度的控制穿刺针的穿刺力度和穿刺深度,实现半自动或自动化的穿刺作业,同时在机械臂上安装的防震动机构防止在穿刺作业时产生抖动的医疗骨肿瘤用介入式治疗设备。
4.为达到上述目的,本发明所采用的技术方案如下:一种医疗骨肿瘤用介入式治疗设备,包括底座,底座上安装有机械臂,在机械臂远离底座端设有穿刺针,所述底座内设有与机械臂相配合的转向座,转向座通过法兰盘与机械臂固接;机械臂包括与法兰盘固接的第一伸缩臂,第一伸缩臂上远离法兰盘端设有横向臂,横向臂与第一伸缩臂相垂直,横向臂上远离第一伸缩臂端设有转动机构,在转动机构上设有与横向臂相垂直的第三摆件,在第三摆件上远离转动机构端设有第四摆件,第四摆件上设有穿刺针。
5.优选的,所述底座内设有控制器和蓄电池,还设有与转向座配合的第一电动机,第一电动机的输出端与转向做啮合;在底座外侧面上设有与蓄电池相连接的充电接口和距离传感器;在底座下端设有与控制器相连接的动力轮。
6.优选的,所述第一伸缩臂包括与法兰盘固接的套筒,套筒与法兰盘接触端为固定板,套筒呈中空结构,在套筒内设有内桶,在内桶上远离套筒端设有安装座板,内桶与套筒滑动配合;还包括设在套筒内且与固定板中部固接的第一伸缩杆,第一伸缩杆的一端与套筒内部的下端面固接,第一伸缩杆另一端与安装座板固接;还包括一端与固定板相连接的伸缩机构,伸缩结构上远离固定板端设有与安装座板固接的连接杆,在第一伸缩臂外侧面上靠近安装座板端设有与控制器相连接的工业相机。
7.优选的,所述横向杆靠近第一伸缩臂侧与安装座板固接,横向杆与第一伸缩臂相垂直,横向杆的轴线与底座的一组侧面相垂直;横向杆上远离第一伸缩臂端设有转动部座
板。
8.优选的,所述转动部座板与横向杆一体化设计,转动部座板上设有转动机构,转动机构采用步进电机,在转动部座板上远离转动机构端设有与转动机构相配合的第一减速器,第一减速器上设有第三摆件。
9.优选的,所述安装座板上安装有转向电机,转向电机输出端上与横向杆相配合的转向套,横向杆与转向套固接,在横向杆内设有伸缩机构,横向杆与第一伸缩臂相垂直,横向杆的轴线与底座的一组侧面相垂直;横向杆上远离第一伸缩臂端设有转动部座板;在第一伸缩臂外侧沿圆周设有与横向杆相配合的三角形支撑架。
10.优选的,所述第三摆件上远离第一减速器端设有第二减速器,第二减速器与第三摆件固接,第二减速器输入端处设有第二电动机,第二电动机采用伺服电动机;在第二减速器输出轴处设有与第四摆件固连的轴套,轴套与第二减速器的输出轴固连,在第四摆件的轴套上设有高精度的角度传感器,角度传感器与控制器相连接。
11.优选的,所述第四摆件包括与第二减速器相配合的轴套,沿轴套轴线延伸有内部为圆柱状中空结构的外壳;还包括设在第四摆件内的伸缩机构,伸缩机构上远离第三减速器端连接有穿刺针;还包括在外壳上远离轴套端设有传感器结构,传感器结构包括结构光相机和距离传感器。
12.优选的,所述伸缩机构包括设在第四摆件外侧面上的第三电动机,还包括设在外壳内与第三电动机相配合的第三减速器,第三电动机通过传动链与第三电动机相连接,第三减速器输出轴上设有丝杆,丝杆上设有轴承,在轴承上远离第三减速器端设有与外壳滑动配合的滑动套。
13.优选的,所述穿刺针包括位于外壳内的穿刺针座,穿刺针座上靠近滑动套端设有与滑动套相连接的紧固杆,穿刺针座上远离滑动套端设有穿刺针头。
14.本发明的有益效果是本发明通过底座上安装的动力轮方便底座位置的调整,实现对穿刺针位置的调整,本发明的第一伸缩臂通过伸缩实现第一伸缩臂高度的调节继而实现对穿刺针高度的调整,通过转动机构实现对第三摆件转向的调整,实现穿刺针在水平面上角度的调节,通过第三减速机实现在垂直面内穿刺针角度的调节,总的,通过第一伸缩臂、转动机构和第三减速机实现对穿刺针在三维空间中角度的调整。
附图说明
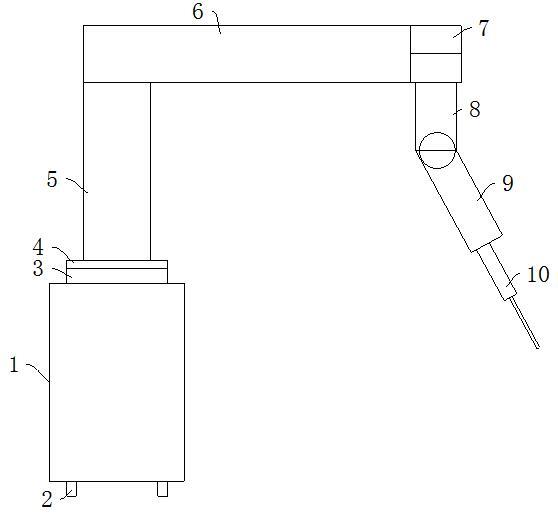
15.图1是本发明的医疗骨肿瘤用介入式治疗设备示意图。
16.图2是本发明的底座示意图。
17.图3是本发明的底座正视图。
18.图4是本发明的第一伸缩臂示意图。
19.图5是本发明的转动机构示意图。
20.图6是本发明的第三摆件示意图。
21.图7是本发明第三摆件的第二减速器示意图。
22.图8是本发明的第四摆件示意图。
23.图9是本发明的第四摆件截面图。
24.图中:底座1、充电接口101、距离传感器102、第一电动机103、控制器104、动力轮2、
转向座3、法兰盘4、第一伸缩臂5、第一伸缩杆501、固定板502、套筒503、伸缩机构504、内桶505、连接杆506、安装座板507、横向臂6、转动部座板601、转动机构7、第三摆件8、第一减速器801、第二电动机802、第二减速器803、第四摆件9、轴套901、第三电动机902、第三减速器903、传动链904、丝杆905、滑动套906、外壳907、轴承908、传感器结构909、穿刺针10、紧固杆1001、穿刺针头1002。
具体实施方式
25.为了更好的理解本发明,下面结合具体实施例作进一步的说明。
26.下面结合附图对本发明的具体实施方式作进一步的说明。
27.实施例一:如图1-9所示的一种医疗骨肿瘤用介入式治疗设备,包括底座1,底座1上安装有机械臂,在机械臂远离底座1端设有穿刺针10,底座1内设有与机械臂相配合的转向座3,转向座3通过法兰盘4与机械臂固接;机械臂包括与法兰盘4固接的第一伸缩臂5,第一伸缩臂5上远离法兰盘4端设有横向臂6,横向臂6与第一伸缩臂5相垂直,横向臂6上远离第一伸缩臂5端设有转动机构7,在转动机构7上设有与横向臂6相垂直的第三摆件8,在第三摆件8上远离转动机构7端设有第四摆件9,第四摆件9上设有穿刺针10。
28.底座1内设有控制器104和蓄电池,还设有与转向座3配合的第一电动机103,第一电动机103的输出端与转向做3啮合;在底座1外侧面上设有与蓄电池相连接的充电接口101和距离传感器102;在底座1下端设有与控制器104相连接的动力轮2。
29.第一伸缩臂5包括与法兰盘4固接的套筒503,套筒503与法兰盘4接触端为固定板502,套筒503呈中空结构,在套筒503内设有内桶505,在内桶505上远离套筒503端设有安装座板507,内桶505与套筒503滑动配合;还包括设在套筒503内且与固定板502中部固接的第一伸缩杆501,第一伸缩杆501的一端与套筒503内部的下端面固接,第一伸缩杆501另一端与安装座板507固接;还包括一端与固定板502相连接的伸缩机构504,伸缩结构504上远离固定板502端设有与安装座板507固接的连接杆506,在第一伸缩臂5外侧面上靠近安装座板507端设有与控制器104相连接的工业相机。
30.横向杆6靠近第一伸缩臂5侧与安装座板507固接,横向杆6与第一伸缩臂5相垂直,横向杆6的轴线与底座1的一组侧面相垂直;横向杆6上远离第一伸缩臂5端设有转动部座板601。
31.转动部座板601与横向杆6一体化设计,转动部座板501上设有转动机构7,转动机构7采用步进电机,在转动部座板501上远离转动机构7端设有与转动机构7相配合的第一减速器801,第一减速器801上设有第三摆件8。
32.第三摆件8上远离第一减速器801端设有第二减速器803,第二减速器803与第三摆件8固接,第二减速器803输入端处设有第二电动机802,第二电动机802采用伺服电动机;在第二减速器803输出轴处设有与第四摆件9固连的轴套901,轴套901与第二减速器803的输出轴固连,在第四摆件9的轴套901上设有高精度的角度传感器,角度传感器与控制器104相连接。
33.第四摆件9包括与第二减速器803相配合的轴套901,沿轴套901轴线延伸有内部为圆柱状中空结构的外壳907;还包括设在第四摆件9内的伸缩机构,伸缩机构上远离第三减
速器903端连接有穿刺针10;还包括在外壳907上远离轴套901端设有传感器结构909,传感器结构909包括结构光相机和距离传感器。
34.伸缩机构包括设在第四摆件9外侧面上的第三电动机902,还包括设在外壳907内与第三电动机902相配合的第三减速器903,第三电动机902通过传动链904与第三电动机902相连接,第三减速器903输出轴上设有丝杆905,丝杆905上设有轴承908,在轴承908上远离第三减速器903端设有与外壳907滑动配合的滑动套906。
35.穿刺针10包括位于外壳907内的穿刺针座,穿刺针座上靠近滑动套906端设有与滑动套906相连接的紧固杆1001,穿刺针座上远离滑动套906端设有穿刺针头1002。
36.工作原理为:在底座1上安装有显示器,显示器与控制器104相连接,通过显示器输入穿刺针需要的空间角度和高度,然后控制器104通过距离传感器102测量的底座1与患者之间的距离,然后根据患者与底座1之间的距离计算出第一伸缩臂5所需要调节的高度,第三摆件8和第四摆件9连接处的第二减速器803带动第四摆件9所需摆动的角度,通过控制器104向动力轮2发出信号,动力轮2根据指令做出相应位移的运动,然后控制器104控制第一伸缩杆501的伸长或缩短实现对第一伸缩臂5高度的调节,继而实现穿刺针10高度的调节,当穿刺针10高度调节完成之后,控制器104控制第二电动机802转动继而通过第二减速器803带动与第二减速器803输出端相连接的第四摆件9角度的调整,实现第四摆件9与第三摆件8之间夹角的调整,当穿刺针10在垂直面内角度调整完成之后,通过控制器104通过控制转动机构7转动带动第三摆件8转动一定角度,实现对穿刺针10在水平面内角度的调节,穿刺针10方向调整完成之后通过控制器104控制第四摆件9内的第三电动机902工作,通过第三减速器903带动丝杆905转动,继而实现轴承908相对丝杆905的移动,实现与轴承908相连接的滑动套906推动穿刺针10运动,并通过传感器结构909实现对第三电动机902快慢的检测和转速大小的控制。
37.实施例二:一种医疗骨肿瘤用介入式治疗设备,与实施例1相比,安装座板507上安装有转向电机,转向电机输出端上与横向杆6相配合的转向套,横向杆6与转向套固接,在横向杆6内设有伸缩机构,横向杆6与第一伸缩臂5相垂直,横向杆6的轴线与底座1的一组侧面相垂直;横向杆6上远离第一伸缩臂5端设有转动部座板601;在第一伸缩臂5外侧沿圆周设有与横向杆6相配合的三角形支撑架。
38.工作原理为:在调节穿刺针10过程中通过控制器104控制横向杆6与底座1上外侧面角度的调节,方便横向杆6的存放,当需要将横向杆6收纳时通过控制器104向转向电机发出信号,转向电机工作带动横向杆6从横向杆6的轴线沿宽度方向转到横向杆6的轴线沿长度方向,使得横向杆6与底座1的长度方向重合,同时,通过控制器104控横向杆6中的伸缩机构实现对横向杆6长度的控制,实现节省空间,三角形支撑架包括与第一伸缩臂5固接的竖杆,竖杆上靠近横向杆6端设有与第一伸缩臂5相配合的轴承,轴承外侧面上设有与横向杆6相连接的横杆,横杆上一端设有与竖杆一端相连接的斜杆,横杆跟随横向杆6转动而转动。
39.实施例三:一种医疗骨肿瘤用介入式治疗设备,与实施例1相比,在外壳907上与穿刺针10所对应部分的外壳壳体呈中空结构,外壳907的壳体内设有紫外灯,在外壳907上外侧面设有保护壳,保护壳与外壳907滑动配合,保护壳内设有与控制器104相连接的紫外灯。
40.工作时通过控制器104将外壳907和保护壳内的紫外灯打开,对穿刺针10进行消毒作业,然后将紫外灯关闭,将保护壳从外壳907上取下,其余操作与实施例1相同,当穿刺作业完成之后将使用过后的穿刺针头1002取下,然后将保护壳套在外壳907上,然后通过紫外灯对穿刺针10进行消毒,避免交叉感染。
41.以上所述仅为本发明的优选实施例而已,只为说明本发明的方案及效果,不能被认为用于限定本发明的实施范围,应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化与改进,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。