1.本实用新型属于道路交通用护栏技术领域,尤其涉及一种升降式运载机器人及移动护栏。
背景技术:
2.近年来,随着城市发展进程的不断推进,市民的汽车保有总量逐年增加,导致交通拥堵问题愈发突出,特别是在早晚上下班高峰期,存在典型的潮汐式拥堵现象。而移动护栏作为解决潮汐式拥堵的方案之一,其主要根据车流量来实时分配道路资源,可有效疏导高峰期交通流;同时,移动护栏的自移动特性还在一定程度上减少了路口交通指挥人员的需求量,有利于实现城市道路的精细化、高效化管理。
3.相对于传统的固定式护栏,移动护栏可实现移动和固定两种状态的切换,但其状态切换次数越多,受道路环境的影响就越大,使用一段时间后,移动护栏往往偏离预定的轨迹,对来往车辆造成威胁,由于护栏整体重量大、长度长等特点,导致矫正位置的难度相当大。该矫正难度主要基于护栏本身的构造产生,如中国专利zl201821931772.7公开了一种感应式自动化移动护栏,通过电路控制板、行走传感器监测行走轮的移动距离、速度,实现行走轮的自动化行走,而行走轮由升降控制模组和齿轮传动组件共同控制,这种控制方式使得行走轮只能往复移动,无法实现轨迹纠偏。
4.再如中国专利申请202011366729.2公开了一种市政道路潮汐车道专用升降护栏,通过在潮汐车道两侧设置容纳槽实现护栏的升降,一方面,升降结构复杂,在容纳槽中安装时非常不方便,护栏在升降过程中容易对靠近车辆产生安全隐患;另一方面,容纳槽的存在势必会影响道路的使用寿命,而且也使得护栏的应用场景单一,难以适应多变的道路交通环境。
技术实现要素:
5.有鉴于此,本实用新型提供了一种结构合理可靠、安全性好、应用灵活方便的升降式运载机器人及移动护栏,能够有效缓解潮汐式交通拥堵。
6.为了解决上述技术问题,一方面,本实用新型提出一种升降式运载机器人,包括第一壳体和第二壳体,第一壳体与第二壳体固定连接,且第二壳体位于第一壳体的底部,第二壳体内设置有第一安装板、第二安装板和升降机构,第一安装板与第二安装板相对设置,且第一安装板与第二壳体固定连接;升降机构通过电动推杆调节第一安装板与第二安装板之间的距离,使第二壳体处于升起状态或支撑状态,该升降机构包括相互交叉形成x状的第一框架和第二框架,第一框架与第二框架的交叉处通过调节机构限位,第一框架和第二框架的顶角处通过轴承活动连接有导轨,导轨与第一安装板或第二安装板固定连接;第二安装板背离升降机构的一侧设置有移动机构,第二壳体处于升起状态时,移动机构至少部分位于第二壳体外;第二壳体处于支撑状态时,移动机构位于第二壳体内。
7.可选的,移动机构包括两个驱动轮和一个万向轮,两个驱动轮并排设置,且与万向
轮呈三角状排布,驱动轮通过电机驱动,电机固定于第二安装板上。
8.可选的,调节机构包括第一连接板、第二连接板、螺柱和螺母,第一连接板的固定部与第一安装板固定连接,第二连接板的固定部与第二安装板固定连接,第一连接板的调节部和第二连接板的调节部均设置有限位槽,螺柱的螺纹端穿过第一框架、第二框架和限位槽后与螺母连接。
9.可选的,第一壳体的上方设置有光伏板,光伏板通过支撑柱与第一壳体固定连接;第一壳体内设置有控制器和蓄电池,控制器和蓄电池均固定于第一安装板上,光伏板与蓄电池电连接,蓄电池与控制器电连接,控制器与电动推杆电连接。
10.可选的,第一壳体内还设置有倾角传感器,倾角传感器固定于第一安装板上,且与控制器电连接,用以监测运载机器人的倾斜度。
11.可选的,第一壳体朝向车道的侧面上设置有显示屏和障碍检测器,障碍检测器位于显示屏的外围,用以检测靠近运载机器人的障碍物。
12.可选的,障碍检测器为超声波传感器、射频传感器、微波传感器或视频检测器。
13.可选的,电动推杆跨设于第一框架和第二框架之间;电动推杆的固定部与第一框架固定连接,电动推杆的伸缩部与第二框架固定连接;或者,电动推杆的固定部与第二框架固定连接,电动推杆的伸缩部与第一框架固定连接。
14.另一方面,本实用新型还提出一种移动护栏,包括多个前述的升降式运载机器人,多个升降式运载机器人间隔设置于正向车道与反向车道的分界线上,且升降式运载机器人朝向分界线的侧面上设置有护栏体。
15.可选的,护栏体的端部设置有至少一个卡扣,相邻的护栏体之间通过卡扣连接有连接绳。
16.与现有技术相比,本实用新型提供的升降式运载机器人及移动护栏,至少实现了如下的有益效果:
17.(1)本实用新型的运载机器人利用电动推杆调节两安装板之间的距离,由于第一安装板与第二壳体相固定,框架形成的x状结构可以在第二壳体内自由伸缩,进而使得第二壳体具有升起和支撑两种状态,在升起状态下移动机构带动整体结构在车道间移动,变更正反向车道数量,通过调节移动速度可以有效提高变道的效率,降低变道对交通流的影响;在支撑状态下通过第二壳体的支撑作用定位在路面上,同时利用结构整体的自重确保其在路面上的稳定性,从而可以有效确保变道后所形成的潮汐车道的安全性。
18.(2)本实用新型的运载机器人在利用移动机构实现变道时,可以通过调节两个驱动轮之间的速度差实现结构整体旋转一定角度或边旋转边直行,进而纠正变道过程中的轨迹偏向,使得变道后的运载机器人能够准确到达目标分界线,无需交警现场手动纠偏,极大地提高了现场管理的效率和安全性。
19.(3)本实用新型利用升降式运载机器人架设形成的移动护栏,排列形式灵活多变,能够适应复杂多变的道路交通需求,并且通过连接绳隔离来往车辆,隔离效果明显,还能有效减少行车安全隐患。
附图说明
20.图1是本实用新型提供的升降式运载机器人的立体结构示意图;
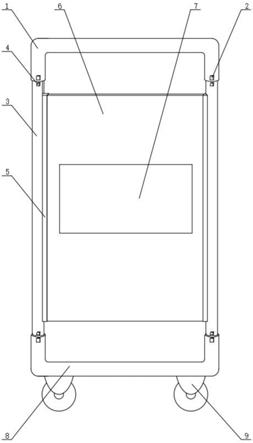
21.图2是本实用新型提供的升降式运载机器人在升起状态时的主视结构示意图;
22.图3是图2中升降机构的结构示意图;
23.图4是本实用新型提供的升降式运载机器人在支撑状态时的主视结构示意图;
24.图5是图4中升降机构的结构示意图;
25.图6是本实用新型中调节机构的结构示意图;
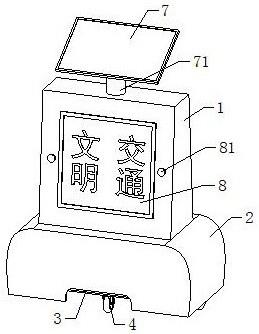
26.图7是本实用新型提供的移动护栏的立体结构示意图;
27.图8是本实用新型提供的移动护栏的一种应用效果图;
28.图9是本实用新型提供的移动护栏的另一种应用效果图。
29.其中:1、第一壳体,2、第二壳体,21、第一安装板,22、第二安装板,3、升降机构,31、第一框架,32、第二框架,33、轴承,34、导轨,35、电动推杆,4、移动机构,41、驱动轮,42、万向轮,43、电机,5、调节机构,51、第一连接板,52、第二连接板,53、限位槽,54、螺柱,55、螺母,6、控制器,61、倾角传感器,7、光伏板,71、支撑柱,72、蓄电池,8、显示屏,81、障碍检测器,9、护栏体,91、卡扣,92、法兰件,10、升降式运载机器人,11、连接绳,12、正向车道,13、反向车道。
具体实施方式
30.下面结合附图与实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外需要说明的是,为了便于描述,附图中仅示意出了与本实用新型相关的部分。
31.请参考图1至图5所示,本实用新型提供了一种升降式运载机器人,包括第一壳体1和第二壳体2,第一壳体1与第二壳体2固定连接,且第二壳体2位于第一壳体1的底部,第一壳体1和第二壳体2具有对其内部零件进行保护的作用,两者的材质优选不锈钢,可采用焊接或一体轧制工艺预先制作,降低装配操作的难度,也更应道路环境,有利于延长运载机器人的使用寿命;第二壳体2内设置有第一安装板21、第二安装板22和升降机构3,第一安装板21与第二安装板22相对设置,且第一安装板21与第二壳体2固定连接,第一安装板21和第二安装板22优选采用硬度较大的金属材料制成,同时外表面可涂覆或电镀耐腐蚀层,这样可以有效确保安装其上的部件的稳固性,并防止升降机构3在升降过程中对其产生形变影响;升降机构3通过电动推杆35调节第一安装板21与第二安装板22之间的距离,使第二壳体2处于升起状态或支撑状态,该升降机构3包括相互交叉形成x状的第一框架31和第二框架32,第一框架31与第二框架32的交叉处通过调节机构5限位,第一框架31和第二框架32的顶角处通过轴承33活动连接有导轨34,导轨34与第一安装板21或第二安装板22固定连接;第二安装板22背离升降机构3的一侧设置有移动机构4,第二壳体2处于升起状态时,移动机构4至少部分位于第二壳体2外;第二壳体2处于支撑状态时,移动机构4位于第二壳体2内。
32.本实施例中,由于第一安装板21与第二壳体2相固定,第一框架31和第二框架32所形成的x状结构可以在第二壳体2内自由伸缩,进而使得第二壳体2具有升起和支撑两种状态:在升起状态下,如图2所示,移动机构4位于第二壳体2外的轮部可带动整体结构在车道间移动,变更正反向车道数量,并可通过调节移动机构4的移动速度确保运载机器人的变道效率,降低变道过程对通行中交通流的影响;在支撑状态下,如图4所示,移动机构4不具有移动功能,此时运载机器人可通过第二壳体2的支撑作用定位在路面的指定分界线上,同时
利用结构整体的自重确保其在路面上的稳定性,相对于传统的移动护栏,变道后所形成的潮汐车道的安全性更好。
33.电动推杆35的安装位置可以根据实际需要设置,只要能确保其伸缩部可以灵活调节第一安装板21与第二安装板22之间的距离即可。作为优选的,电动推杆35跨设于第一框架31和第二框架32之间;电动推杆35的固定部与第一框架31固定连接,电动推杆35的伸缩部与第二框架32固定连接;或者,电动推杆35的固定部与第二框架32固定连接,电动推杆35的伸缩部与第一框架31固定连接,此时电动推杆35横向放置,第二壳体2处于支撑状态时,第一框架31与第二框架32之间的最小距离可以设置得很小,也即框架所形成的x状结构可以实现最大程度的收缩。
34.为了使框架所形成的x状结构可以实现反复、精准的升降操作,在第一框架31和第二框架32的交叉处设置了调节机构5用以对两者进行纵向限位;同时,两框架的顶角处通过轴承33与导轨34的配合进行横向限位。第一框架31与第二框架32之间的相对位置关系可以根据实际需要设置,图3和图5中仅以第一框架31位于第二框架32的外侧为例进行了示意。导轨34的数量可以与轴承33一一对应设置,也可以是位于同一高度同一侧的轴承33设置于同一导轨34内,图3和图5仅以后者为例进行了示意。
35.在一些可选的实施例中,结合参考图6所示,调节机构5包括第一连接板51、第二连接板52、螺柱54和螺母55,第一连接板51的固定部与第一安装板21固定连接,第二连接板52的固定部与第二安装板22固定连接,第一连接板51的调节部和第二连接板52的调节部均设置有限位槽53,两调节部的限位槽53之间至少部分重叠,从而可以利用限位槽53可调范围实现第一连接板51与第二连接板52相对移动;螺柱54的螺纹端穿过第一框架31、第二框架32和限位槽53后与螺母55连接,此时随着升降机构3的升降,第一框架31和第二框架32相对于螺柱54做旋转运动,而第一连接板51和第二连接板52则相对于螺柱54做上下平移运动,同时由于连接板的固定部固定在安装板上,有效避免了升降机构3在运动过程中的横向偏移。
36.在一些可选的实施例中,移动机构4包括两个驱动轮41和一个万向轮42,两个驱动轮41并排设置,且与万向轮42呈三角状排布,此时即便第二壳体2处于升起状态,运载机器人仍在三个轮子的支撑作用下仍具有较好的稳定性;驱动轮41通过电机43驱动,电机43固定于第二安装板22上。运载机器人在进行变道时,可以通过对两个电机43速度的控制直接调节两个驱动轮之间的速度差,同时,万向轮42随驱动轮41自动调节转动方向和移动速度,使结构整体可以旋转一定角度或边旋转边直行,纠正变道过程中的轨迹偏向,确保变道后的运载机器人能够准确到达目标分界线,无需交警现场手动纠偏,极大地提高了现场管理的效率和安全性。
37.在一些可选的实施例中,第一壳体1的上方设置有光伏板7,光伏板7通过支撑柱71与第一壳体1固定连接;第一壳体1内设置有控制器6和蓄电池72,控制器6和蓄电池72均固定于第一安装板21上,光伏板7与蓄电池72电连接,光伏板7转化的电能储存在蓄电池72内,蓄电池72与控制器6电连接,为控制器6提供电能,进而控制器6与电动推杆35电连接后,可以直接利用控制器6驱动和控制电动推杆35的伸缩操作。控制器6的芯片优选stm32f103cbt6型;电动推杆35优选xtl100型,可实现横装或侧装,并且任意位置可停止,自带机锁,安全性高。
38.作为进一步优选的,用于驱动驱动轮41的电机43也与控制器6电连接,通过控制器6一方面直接控制电机43的转速,另一方面为电机43提供电能,无需从外界接入电源,使得壳体内部的线路排布更加简洁明了。
39.在一些可选的实施例中,第一壳体1内还设置有倾角传感器61,倾角传感器61固定于第一安装板21上,且与控制器6电连接,用以监测运载机器人的倾斜度。当运载机器人受外力(如车辆撞击、大风吹刮等)产生倾斜或倾倒时,及时发出警告,提醒相关人员进行维护,防止对通行车辆和行人产生安全隐患。倾角传感器61优选zct1360j-stx-ah-h6-41型,最大测量角范围单轴可达360
°
,精度达到
±
0.3
°
。
40.在一些可选的实施例中,第一壳体1朝向车道的侧面上设置有显示屏8和障碍检测器81,障碍检测器81位于显示屏8的外围,用以检测靠近运载机器人的障碍物。在变道前和变道过程中,若障碍检测器81检测到附近有车辆或行人,及时发出警告,同时显示屏8上可显示警示文字并伴以语音提示;若障碍检测器81未检测到附近有车辆或行人,显示屏8在准备变道和变道过程中显示“即将变道,注意安全”、“变道中,注意安全”等字样,变道完成后显示屏8可显示“文明交通”等字样。
41.作为进一步优选的,障碍检测器81为超声波传感器、射频传感器、微波传感器或视频检测器。以障碍检测器81为超声波传感器为例,优选hc-sr04型超声波传感器,障碍物检测精度可达0.3cm,盲区2cm超近,具有较好的稳定性,能够适应潮汐车道的障碍检测要求。
42.请参考图7和图8所示,本实用新型还提供了一种移动护栏,包括多个上述任一实施例提供的升降式运载机器人10,多个升降式运载机器人10间隔设置于正向车道12与反向车道13的分界线上,且升降式运载机器人10朝向分界线的侧面上设置有护栏体9,从而通过升降式运载机器人10带动护栏体9实现变道。相邻的护栏体9之间可以留有一定的间距,防止变道时相互之间产生碰撞影响,也有利于为升降式运载机器人10的纠偏操作提供足够的空间。护栏体9可以直接焊接固定在升降式运载机器人10的第一壳体1上,也可以采用法兰件92与升降式运载机器人10的第一壳体1可拆卸连接,护栏体9的长度可根据升降式运载机器人10所能承载的重量灵活设置。
43.本实施例中,以单个升降式运载机器人10及安装其上的护栏体9为一个护栏单元,若干护栏单元可按照上位指令同时移动进行变道,也可按照不同的排列组合形式独立地进行变道,以适应复杂多变的道路交通需求,比如图9所示:第一部分护栏单元停留在原来的车道分界线上,第二部分护栏单元移动并旋转倾斜在车道间,第三部分护栏单元移动至相邻的车道分界线上,从而形成z型组合形式,此时在正向行车方向上,正向车道12由1车道增加至2车道;在反向行车方向上,反向车道13也由1车道增加至2车道,可有效缓解潮汐式拥堵现象。
44.在一些可选的实施例中,升降式运载机器人10和/或护栏体9上还设置有定位模块(未画出),该定位模块为uwb定位模块、gps定位模块、北斗定位模块或蓝牙定位模块,通过定位模块可直接在后台查看道路现场移动护栏的数量及其排列组合形态,以便交管部门可以直接在后台通过观察车流量情况为制定出最佳的移动护栏架设方案。
45.在一些可选的实施例中,护栏体9的端部设置有至少一个卡扣91,相邻的护栏体9之间通过卡扣91连接有连接绳11,从而可通过连接绳11进一步隔离来往车辆并防止行人随意过马路,隔离效果明显,也能有效减少行车安全隐患。当某个或某些护栏单元因故障需要
维护时,可直接将所连接的连接绳11从卡扣91上取下,驱动故障的护栏单元移动至路侧进行修理,如修理时间较长,可增加新的护栏单位填补空位,连接好连接绳11后移动护栏即可正常运行,有效提高了现场维护的效率。
46.以上各实施例仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型保护范围之内;本实用新型未涉及的技术均可通过现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。