1.本实用新型属于键帽技术领域,具体涉及一种键帽生产用的移位自动固定定位装置。
背景技术:
2.随着社会的发展,社会对计算机的需求量日益增加,在计算机的使用时,需要使用键盘对计算机的设备进行操作控制,以实现相应的功能,键盘需要使用多个键帽进行组装形成;
3.在现有的键盘生产过程中,通常是人工将键帽逐个扣压式安装到键盘模组中,在对键帽装配时,需要人工将键帽定位后再进行装配,当人工键帽装配定位不准时,装配至键盘模组中时会导致键帽损坏与不便安装,造成经济损失;
4.因此针对上述问题,需要提出一种键帽生产用的移位自动固定定位装置。
技术实现要素:
5.针对现有技术中所存在的不足,本实用新型提供了一种键帽生产用的移位自动固定定位装置,当第四板体需要进行转动时,利用轴承的进行辅助第四板体在底座板体上进行转动,从而进一步辅助安装平台进行转动,方便将安装平台机械爪机构进行转动微调。
6.为实现上述目的,本实用新型采用了如下的技术方案:
7.一种键帽生产用的移位自动固定定位装置,包括主体组件和定位组件,所述主体组件包括底座板体、第一板体、第二板体、机械爪机构;
8.所述主体组件的上表面安装有定位组件,所述主体组件的上方设有机械爪机构;
9.所述定位组件包括v型板体、v型漏斗板体、钢珠、安装平台、第三板体、第四板体、第五板体、第一弹簧、第六板体和第二弹簧;
10.所述v型板体共设置四个,四个所述v型板体的下表面相互对称焊接于所述安装平台的上表面,所述v型板体的上表面焊接于所述v型漏斗板体的下表面,所述v型漏斗板体的内侧壁均匀嵌接有钢珠,所述第三板体的上表面开设有第一凹槽,所述第一凹槽的内侧壁贴合于所述第五板体的外侧壁,所述第五板体的两侧对称焊接有两个第一弹簧,所述第一弹簧远离所述第五板体的一端焊接于所述第一凹槽的内侧壁。
11.进一步的,所述第四板体的上表面开设有第二凹槽,所述第二凹槽的内侧壁贴合于所述第六板体的外侧壁,所述第六板体的上表面焊接于所述第三板体的下表面,通过第六板体的设置,既能辅助第三板体进行移动,又能对第三板体进行限位。
12.进一步的,所述第一凹槽的内侧壁对称开设有两个第二滑槽,所述第二滑槽的内侧壁滑动连接有第二滑块,所述第二滑块远离所述第二滑槽的一侧焊接于所述第五板体的外侧壁,通过第二滑块在第二滑槽内滑动,既能辅助第五板体进行移动,又能对第五板体进行限位。
13.进一步的,所述第六板体的两侧对称焊接有两个第二弹簧,所述第二弹簧远离所
述第六板体的一端焊接于第二凹槽的内侧壁,通过第二弹簧的设置,第二弹簧的弹性势能带动第六板体上的第三板体进行复位。
14.进一步的,所述底座板体的下表面相互对称焊接有四个第一板体,通过第一板体的设置,既能抬高底座板体的高度,又能对底座板体的位置进行限位。
15.进一步的,所述第二凹槽的内侧壁滑动连接有第一滑块,所述第一滑块远离所述第一滑槽的一侧焊接于所述第六板体的外侧壁,通过第一滑块在第一滑槽内滑动,既能辅助第六板体进行移动,又能增强对第六板体的位置进行限位。
16.进一步的,所述底座板体的上表面安装有轴承,所述轴承的上表面安装于所述第四板体的下表面,通过轴承的设置,当机械爪机构的位置有角度偏移时,机械爪机构带动第四板体通过轴承在底座板体上转动。
17.进一步的,两个所述第一板体相邻的一侧焊接于所述第二板体的两端,通过第二板体的设置,既能增强固定第一板体的位置,又能进一步稳定底座板体的位置。
18.本实用新型的技术原理在于:通过将机械爪机构夹取键帽移动至v型漏斗板体的上方,v型漏斗板体上的钢珠辅助机械爪机构滑动至v型板体内,然后受到机械爪机构向下移动的压力带动v型板体进行移动,从而使v型板体带动安装平台进行调整,从而使安装平台带动第五板体在第三板体上的第一凹槽内滑动时,第三板体带动第六板体在第四板体上的第二凹槽进行滑动,当机械爪机构的位置有角度偏移时,机械爪机构带动第四板体通过轴承在底座板体上转动,能够根据机械爪机构的位置进行微调定位,当将键帽安装完毕后,通过第一弹簧的弹性势能带动第五板体上的安装平台进行复位,其中通过第二弹簧的弹性势能带动第六板体上的第三板体进行复位,方便下次进行机械爪机构进行调整安装位置。
19.相比于现有技术,有益效果为:通过将机械爪机构移动至v型漏斗板体上的钢珠上,钢珠辅助机械爪机构滑动至v型板体内,然后根据机械爪机构的位置带动v型板体进行移动,从而使v型板体带动安装平台进行调整,从而使安装平台带动第五板体在第三板体上的第一凹槽内滑动时,第三板体带动第六板体在第四板体上的第二凹槽进行滑动,达到快速自动根据机械爪机构的位置进行定位的目的,提高安装平台机械爪机构的位置调整定位,提高键帽安装固定的准确性。
附图说明
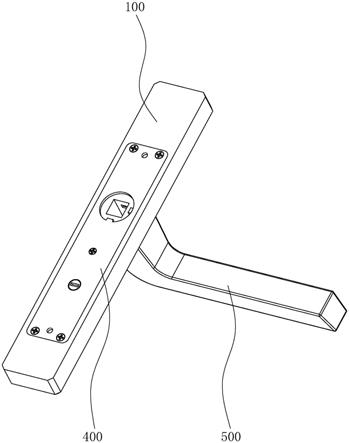
20.图1为本实用新型实施例中的结构示意图。
21.图2为本实用新型实施例中v型板体与v型漏斗板体的立体结构示意图。
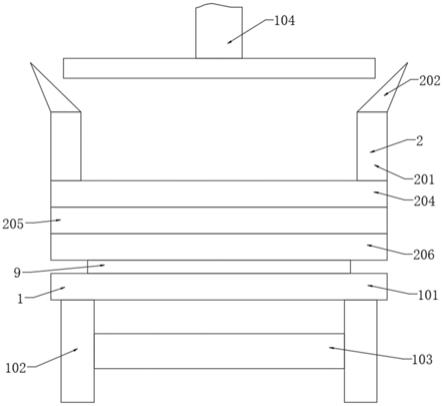
22.图3为本实用新型实施例中定位组件立体的剖视结构示意图。
23.图4为本实用新型实施例中定位组件立体侧视的内部结构示意图。
24.图5为本实用新型实施例中图4的a区放大结构示意图。
25.附图标记:1、主体组件;101、底座板体;102、第一板体;103、第二板体;104、机械爪机构;2、定位组件;201、v型板体;202、v型漏斗板体;203、钢珠;204、安装平台;205、第三板体;206、第四板体;207、第五板体;208、第一弹簧;209、第六板体;210、第二弹簧;3、第一凹槽;4、第二凹槽;5、第一滑槽;6、第一滑块;7、第二滑槽;8、第二滑块;9、轴承。
具体实施方式
26.下面结合附图及实施例对本实用新型中的技术方案进一步说明。
27.参照图1、图2、图3、图4以及图5所示,根据本实用新型实施例提出的一种键帽生产用的移位自动固定定位装置,包括主体组件1和定位组件2,主体组件1包括底座板体101、第一板体102、第二板体103、机械爪机构104;
28.主体组件1的上表面安装有定位组件2,主体组件1的上方设有机械爪机构104;
29.定位组件2包括v型板体201、v型漏斗板体202、钢珠203、安装平台204、第三板体205、第四板体206、第五板体207、第一弹簧208、第六板体209和第二弹簧210;
30.v型板体201共设置四个,四个v型板体201的下表面相互对称焊接于安装平台204的上表面,v型板体201的上表面焊接于v型漏斗板体202的下表面,v型漏斗板体202的内侧壁均匀嵌接有钢珠203,第三板体205的上表面开设有第一凹槽3,第一凹槽3的内侧壁贴合于第五板体207的外侧壁,第五板体207的两侧对称焊接有两个第一弹簧208,第一弹簧208远离第五板体207的一端焊接于第一凹槽3的内侧壁。
31.参照图3和图4所示,作为本实用新型的其他实施例,第四板体206的上表面开设有第二凹槽4,第二凹槽4的内侧壁贴合于第六板体209的外侧壁,第六板体209的上表面焊接于第三板体205的下表面,通过第六板体209的设置,既能辅助第三板体205进行移动,又能对第三板体205进行限位,方便调节第三板体205的位置。
32.参照图3和图5所示,作为本实用新型的其他实施例,第一凹槽3的内侧壁对称开设有两个第二滑槽7,第二滑槽7的内侧壁滑动连接有第二滑块8,第二滑块8远离第二滑槽7的一侧焊接于第五板体207的外侧壁,通过第二滑块8在第二滑槽7内滑动,既能辅助第五板体207进行移动,又能对第五板体207进行限位,进一步辅助安装平台204进行移动,又能进一步对安装平台204进行限位。
33.参照图3和图4所示,作为本实用新型的其他实施例,第六板体209的两侧对称焊接有两个第二弹簧210,第二弹簧210远离第六板体209的一端焊接于第二凹槽4的内侧壁,通过第二弹簧210的设置,第二弹簧210的弹性势能带动第六板体209上的第三板体205进行复位。
34.参照图1所示,作为本实用新型的其他实施例,底座板体101的下表面相互对称焊接有四个第一板体102,通过第一板体102的设置,既能抬高底座板体101的高度,又能对底座板体101的位置进行限位。
35.参照图3所示,作为本实用新型的其他实施例,第二凹槽4的内侧壁滑动连接有第一滑块6,第一滑块6远离第一滑槽5的一侧焊接于第六板体209的外侧壁,通过第一滑块6在第一滑槽5内滑动,既能辅助第六板体209进行移动,又能增强对第六板体209的位置的限位。
36.参照图1所示,作为本实用新型的其他实施例,底座板体101的上表面安装有轴承9,轴承9的上表面安装于第四板体206的下表面,通过轴承9的设置,当机械爪机构104的位置有角度偏移时,机械爪机构104带动第四板体206通过轴承9在底座板体101上转动,能够根据机械爪机构104的位置进行微调定位。
37.参照图1所示,作为本实用新型的其他实施例,两个第一板体102相邻的一侧焊接于第二板体103的两端,通过第二板体103的设置,既能增强固定第一板体102的位置,又能
进一步稳定底座板体101的位置。
38.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。