1.本公开一般涉及转台控制技术领域,具体涉及一种提升转台调转响应能力控制方法及系统。
背景技术:
2.光电跟踪转台集多波段红外探测器、可见光探测器、激光测距机等于一体,在综合防御系统中具有探测、跟踪以及定位等作用,是保证防御系统准确打击的重要组成部分,其性能的好坏直接影响整个系统的作战能力。其中,跟踪转台实时性的好坏直接决定能否快速有效地捕获与跟踪目标;
3.跟踪转台角度调转控制要求响应速度快、超调小。对大负载转动惯量的跟踪转台而言,这些要求显得更为苛刻。因此,对大惯量跟踪转台大角度调转进行目标捕获过程涉及的控制器响应能力提出更高要求;
4.现有技术中控制转台调转的方法通常为闭合位置控制回路以控制其转动至目标角度,然而位置控制回路带宽低、响应慢的问题,无法适应于更高响应能力的要求。
技术实现要素:
5.鉴于现有技术中的上述缺陷或不足,期望提供一种可解决上述技术问题的一种提升转台调转响应能力控制方法及系统。
6.第一方面本技术提供一种提升转台调转响应能力的方法,包括以下步骤:
7.获取所述转台的角度偏差θ
p
,所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;
8.判断所述角度偏差θ
p
的绝对值大于零时,开启位置控制回路;所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至所述目标角度;
9.判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
;开启速度控制回路,所述速度控制回路用于控制所述转台以所述角速度v
ref
转动;
10.判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路;
11.其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。
12.根据本技术实施例提供的技术方案,所述第一偏差范围包括n个偏差子范围wi,i=1
…
n,每个所述偏差子范围wi对应一个偏差参数ωi;
13.判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
的方法具体为:
14.判断所述角度偏差θ
p
的绝对值所处的偏差子范围wi,得到其对应的偏差参数ωi;
15.根据公式(一)计算角速度v
ref
:
[0016]vref
=ωi*sign(θ
p
)
ꢀꢀ
(一)。
[0017]
根据本技术实施例提供的技术方案,所述第一偏差范围包括第一偏差子范围w1,
第二偏差子范围w2和第三偏差子范围w3;
[0018]
所述第一偏差子范围w1为:大于第一偏差阈值θ1;
[0019]
所述第二偏差子范围w2为:大于第二偏差阈值θ2且小于等于所述第一偏差阈值θ1;
[0020]
所述第三偏差子范围w2为:大于第三偏差阈值θ3且小于等于所述第二偏差阈值θ2;
[0021]
θ1>θ2>θ3;
[0022]
其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为设定值。
[0023]
根据本技术实施例提供的技术方案,所述第二偏差范围为:小于等于所述第三偏差阈值θ3。
[0024]
根据本技术实施例提供的技术方案,所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。
[0025]
第二方面本技术提供一种提升转台调转响应能力控制系统,包括:
[0026]
转台;
[0027]
位置控制回路,所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至目标角度;
[0028]
速度控制回路,用于控制所述转台以角速度v
ref
转动;
[0029]
控制器,配置用于:
[0030]
判断角度偏差θ
p
的绝对值大于零时,开启所述位置控制回路;所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;
[0031]
判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算所述角速度v
ref
,开启所述速度控制回路;
[0032]
判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路;
[0033]
其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。
[0034]
根据本技术实施例提供的技术方案,所述第一偏差范围包括n个偏差子范围wi,i=1
…
n,每个所述偏差子范围wi对应一个偏差参数ωi;
[0035]
所述控制器具体配置用于:
[0036]
判断所述角度偏差θ
p
的绝对值所处的偏差子范围wi以及其对应的偏差参数ωi;
[0037]
根据公式(一)计算角速度v
ref
:
[0038]vref
=ωi*sign(θ
p
)
ꢀꢀ
(一)。
[0039]
根据本技术实施例提供的技术方案,所述第一偏差范围包括第一偏差子范围w1,第二偏差子范围w2和第三偏差子范围w3;
[0040]
所述第一偏差子范围w1为:大于第一偏差阈值θ1;
[0041]
所述第二偏差子范围w2为:大于第二偏差阈值θ2且小于等于所述第一偏差阈值θ1;
[0042]
所述第三偏差子范围w2为:大于第三偏差阈值θ3且小于等于所述第二偏差阈值θ2;
[0043]
θ1>θ2>θ3;
[0044]
其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为
设定值。
[0045]
根据本技术实施例提供的技术方案,所述第二偏差范围为:小于等于所述第三偏差阈值θ3。
[0046]
根据本技术实施例提供的技术方案,所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。
[0047]
本技术的有益效果在于:通过获取所述转台的角度偏差θ
p
,判断所述角度偏差θ
p
的绝对值大于零时,开启位置控制回路,以使得所述位置控制回路响应与外部输入的控制指令,控制所述转台转动至所述目标角度;通过判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
,开启速度控制回路,控制所述转台以角速度v
ref
转动,使得可提高带宽,提高响应速度;通过判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路,此时位置控制回路可控制转台精确转动至目标角度,即角度偏差θ
p
为0;通过上述方法,使得可发挥转台的最佳性能,提高转台的响应速度,减少调转时间。
附图说明
[0048]
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
[0049]
图1为本技术提供的一种提升转台调转响应能力控制方法流程图;
[0050]
图2为图1所示提升转台调转响应能力控制方法的原理图;
[0051]
图3为本技术提供的转台调转180
°
的测试结果图;
[0052]
图4为本技术提供的转台调转50
°
和100
°
的测试结果图;
具体实施方式
[0053]
下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
[0054]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
[0055]
实施例1
[0056]
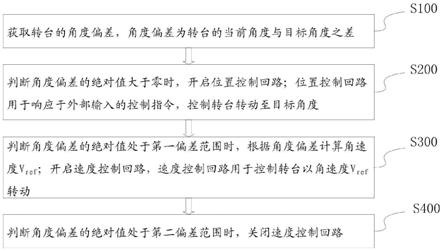
请参考图1为本实施例提供的一种提升转台调转响应能力控制方法,包括以下步骤:
[0057]
s100:获取所述转台的角度偏差θ
p
,所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;
[0058]
具体的,所述目标角度为设定值;所述当前角度可通过传感器测量得到;
[0059]
s200:判断所述角度偏差θ
p
的绝对值大于零时,开启位置控制回路;所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至所述目标角度;
[0060]
s300:判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
;开启速度控制回路,所述速度控制回路用于控制所述转台以所述角速度v
ref
转动;
[0061]
s400:判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路;
[0062]
其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。
[0063]
具体的,所述转台为光电跟踪转台;在控制转台转动的过程中,转台由当前角度转动至目标角度,直至角度偏差θ
p
为0。
[0064]
具体的,所述第一偏差范围、第二偏差范围、角速度v
ref
均为设定值,可根据实际需求进行设置;例如本实施例中,所述第一偏差范围为大于等于5
°
,第二偏差范围为小于5
°
。
[0065]
工作原理:通过获取所述转台的角度偏差θ
p
,判断所述角度偏差θ
p
的绝对值大于零时,开启位置控制回路,以使得所述位置控制回路响应与外部输入的控制指令,控制所述转台转动至所述目标角度;
[0066]
通过判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
,开启速度控制回路,控制所述转台以角速度v
ref
转动,使得可提高带宽,提高响应速度;
[0067]
通过判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路,此时位置控制回路可控制转台精确转动至目标角度,即角度偏差θ
p
为0;
[0068]
通过上述方法,使得可发挥转台的最佳性能,提高转台的响应速度,减少调转时间。
[0069]
在一优选实施方式中,所述第一偏差范围包括n个偏差子范围wi,i=1
…
n,每个所述偏差子范围wi对应一个偏差参数ωi;
[0070]
判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
的方法具体为:
[0071]
判断所述角度偏差θ
p
的绝对值所处的偏差子范围wi,得到其对应的偏差参数ωi;
[0072]
根据公式(一)计算角速度v
ref
:
[0073]vref
=ωi*sign(θ
p
)
ꢀꢀ
(一)。
[0074]
具体的,sign()为符号函数,ωi为设定值;
[0075]
在本实施例中,所述第一偏差范围包括三个第一偏差子范围w1、w2、w3;在其他实施例中,所述第一偏差子范围还可以为一个、两个或多个。
[0076]
工作原理:通过设置n个偏差子范围wi,i=1
…
n,每个所述偏差子范围wi对应一个偏差参数ωi;根据上述公式(一)计算角速度v
ref
,使得可将转台的角度偏差θ
p
与角速度v
ref
建立对应关系,保证超调性能,有效提高跟踪转台大角度调转过程的快速性。
[0077]
在一优选实施方式中,所述第一偏差范围包括第一偏差子范围w1,第二偏差子范围w2和第三偏差子范围w3;
[0078]
所述第一偏差子范围w1为:大于第一偏差阈值θ1;
[0079]
所述第二偏差子范围w2为:大于第二偏差阈值θ2且小于等于所述第一偏差阈值θ1;
[0080]
所述第三偏差子范围w2为:大于第三偏差阈值θ3且小于等于所述第二偏差阈值θ2;
[0081]
θ1>θ2>θ3;
[0082]
其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为
设定值。
[0083]
在本实施例中,θ1=100
°
;θ2=50
°
;θ2=5
°
;ω1=150r/s;ω2=80r/s;ω3=20r/s,即:
[0084]
第一偏差子范围:w1>100
°
;
[0085]
第二偏差子范围:100
°
≥w2>50
°
;
[0086]
第三偏差子范围为:50≥w3>5
°
;
[0087]
为了便于说明本实施例的工作原理,以转台的角度偏差为θ
p
=101
°
为例,由于101
°
的绝对值处于第一偏差子范围内,因此:
[0088]vref
=ω1*sign(101
°
)=150r/s。
[0089]
随着转动过程中,当转台的角度偏差为θ
p
=100
°
时,由于100
°
的绝对值处于第二偏差子范围内,因此:
[0090]vref
=ω1*sign(100
°
)=80r/s。
[0091]
在一优选实施方式中,所述第二偏差范围为:小于等于所述第三偏差阈值θ3。
[0092]
具体的,第二偏差范围为小于等于5
°
。
[0093]
为了进一步说明本技术的有益效果,如图3和图4所示:
[0094]
图3中曲线a为利用本技术提供的提升转台调转响应能力控制方法控制转台调转180
°
的测试结果图;图3中曲线b为仅利用位置控制回路控制转台调转180
°
的测试结果图;从图3中可以看出,曲线a具有较快的调转响应能力。
[0095]
图4中曲线为利用本技术提供的提升转台调转响应能力控制方法控制转台调转50
°
和100
°
的测试结果图;图4中曲线b为仅利用位置控制回路控制转台调转50
°
和100
°
的测试结果图;从图4中可以看出,曲线a具有较快的调转响应能力。
[0096]
在一优选实施方式中,所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。
[0097]
优选的,所述速度控制回路还包括陀螺仪,所述陀螺仪用于检测转台的实际角速度,向所述速度回路控制器发送角速度补偿指令,对转台进行角速度补偿,使得实际角速度值趋近于设定的角速度v
ref
。
[0098]
优选的,所述位置回路控制器还包括旋变,所述旋变用于检测转台的当前角度,向所述速度回路控制器发送位置补偿指令,对转台进行位置补偿,使得实际偏转位置趋近于目标位置。
[0099]
实施例2
[0100]
本实施例提供一种提升转台调转响应能力控制系统,包括:
[0101]
转台;
[0102]
位置控制回路,所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至目标角度;
[0103]
速度控制回路,用于控制所述转台以角速度v
ref
转动;
[0104]
控制器,配置用于:
[0105]
判断所述角度偏差θ
p
的绝对值大于零时,开启所述位置控制回路;所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;
[0106]
判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算所
述角速度v
ref
,开启所述速度控制回路;
[0107]
判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路;
[0108]
其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。
[0109]
工作原理:通过设置位置控制回路,使得当获取所述转台的角度偏差θ
p
,判断所述角度偏差θ
p
的绝对值大于零时,所述位置控制回路可响应与外部输入的控制指令,控制所述转台转动至所述目标角度;
[0110]
通过控制器判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
,开启速度控制回路;使得控制所述转台以角速度v
ref
转动,提高带宽,提高响应速度;
[0111]
通过判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路,此时位置控制回路可控制转台精确转动至目标角度,即角度偏差θ
p
为0;
[0112]
通过上述方法,使得可发挥转台的最佳性能,提高转台的响应速度,减少调转时间。
[0113]
在一优选实施方式中,所述第一偏差范围包括n个偏差子范围wi,i=1
…
n,每个所述偏差子范围wi对应一个偏差参数ωi;
[0114]
所述控制器具体配置用于:
[0115]
判断所述角度偏差θ
p
的绝对值所处的偏差子范围wi以及其对应的偏差参数ωi;
[0116]
根据公式(一)计算角速度v
ref
:
[0117]vref
=ωi*sign(θ
p
)
ꢀꢀ
(一)。
[0118]
在一优选实施方式中,所述第一偏差范围包括第一偏差子范围w1,第二偏差子范围w2和第三偏差子范围w3;
[0119]
所述第一偏差子范围w1为:大于第一偏差阈值θ1;
[0120]
所述第二偏差子范围w2为:大于第二偏差阈值θ1且小于等于所述第一偏差阈值θ2;
[0121]
所述第三偏差子范围w2为:大于第三偏差阈值θ2且小于等于所述第二偏差阈值θ1;
[0122]
θ1>θ2>θ3;
[0123]
其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为设定值。
[0124]
在一优选实施方式中,所述第二偏差范围为:小于等于所述第三偏差阈值θ3。
[0125]
在一优选实施方式中,所述系统还包括传感器,所述传感器用于检测所述转台的当前角度;所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。
[0126]
优选的,所述速度控制回路还包括陀螺仪,所述陀螺仪用于检测转台的实际角速度,向所述速度回路控制器发送角速度补偿指令,对转台进行角速度补偿,使得实际角速度值趋近于设定的角速度v
ref
。
[0127]
优选的,所述位置回路控制器还包括旋变,所述旋变用于检测转台的当前角度,向所述速度回路控制器发送位置补偿指令,对转台进行位置补偿,使得实际偏转位置趋近于目标位置。
[0128]
以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。