技术特征:
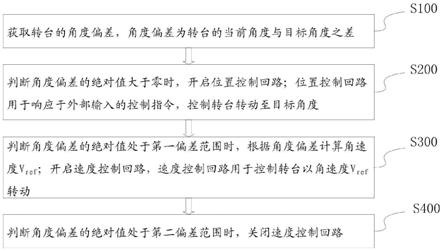
1.一种提升转台调转响应能力控制方法,其特征在于,包括以下步骤:获取所述转台的角度偏差θ
p
,所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;判断所述角度偏差θ
p
的绝对值大于零时,开启位置控制回路;所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至所述目标角度;判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
;开启速度控制回路,所述速度控制回路用于控制所述转台以所述角速度v
ref
转动;判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路;其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。2.根据权利要求1所述的提升跟踪转台调转响应能力控制方法,其特征在于:所述第一偏差范围包括n个偏差子范围w
i
,i=1
…
n,每个所述偏差子范围w
i
对应一个偏差参数ω
i
;判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算角速度v
ref
的方法具体为:判断所述角度偏差θ
p
的绝对值所处的偏差子范围w
i
,得到其对应的偏差参数ω
i
;根据公式(一)计算角速度v
ref
:v
ref
=ω
i
*sign(θ
p
)
ꢀꢀꢀꢀꢀ
(一)。3.根据权利要求2所述的提升跟踪转台调转响应能力控制方法,其特征在于:所述第一偏差范围包括第一偏差子范围w1,第二偏差子范围w2和第三偏差子范围w3;所述第一偏差子范围w1为:大于第一偏差阈值θ1;所述第二偏差子范围w2为:大于第二偏差阈值θ2且小于等于所述第一偏差阈值θ1;所述第三偏差子范围w2为:大于第三偏差阈值θ3且小于等于所述第二偏差阈值θ2;θ1>θ2>θ3;其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为设定值。4.根据权利要求3所述的提升跟踪转台调转响应能力控制方法,其特征在于:所述第二偏差范围为:小于等于所述第三偏差阈值θ3。5.根据权利要求1所述的提升大惯量跟踪转台大角度调转响应能力控制方法,其特征在于:所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。6.一种提升转台调转响应能力控制系统,其特征在于,包括:转台;位置控制回路,所述位置控制回路用于响应于外部输入的控制指令,控制所述转台转动至目标角度;速度控制回路,用于控制所述转台以角速度v
ref
转动;控制器,配置用于:判断角度偏差θ
p
的绝对值大于零时,开启所述位置控制回路;所述角度偏差θ
p
为所述转台的当前角度与目标角度之差;判断所述角度偏差θ
p
的绝对值处于第一偏差范围时,根据所述角度偏差θ
p
计算所述角
速度v
ref
,开启所述速度控制回路;判断所述角度偏差θ
p
的绝对值处于第二偏差范围时,关闭所述速度控制回路。其中,所述第一偏差范围中的最小值大于所述第二偏差范围的最大值;所述第二偏差范围的最小值为0。7.根据权利要求6所述的提升转台调转响应能力控制系统,其特征在于,所述第一偏差范围包括n个偏差子范围w
i
,i=1
…
n,每个所述偏差子范围w
i
对应一个偏差参数ω
i
;所述控制器具体配置用于:判断所述角度偏差θ
p
的绝对值所处的偏差子范围w
i
以及其对应的偏差参数ω
i
;根据公式(一)计算角速度v
ref
:v
ref
=ω
i
*sign(θ
p
)
ꢀꢀꢀ
(一)。8.根据权利要求7所述的提升转台调转响应能力控制系统,其特征在于,所述第一偏差范围包括第一偏差子范围w1,第二偏差子范围w2和第三偏差子范围w3;所述第一偏差子范围w1为:大于第一偏差阈值θ1;所述第二偏差子范围w2为:大于第二偏差阈值θ2且小于等于所述第一偏差阈值θ1;所述第三偏差子范围w2为:大于第三偏差阈值θ3且小于等于所述第二偏差阈值θ2;θ1>θ2>θ3;其中,所述第一偏差子范围w1对应第一偏差参数ω1;所述第二偏差子范围w2对应第二偏差参数ω2;所述第三偏差子范围w3对应第一偏差参数ω3;θ1、θ2、θ3、ω1、ω2、ω3均为设定值。9.根据权利要求8所述的提升转台调转响应能力控制系统,其特征在于:所述第二偏差范围为:小于等于所述第三偏差阈值θ3。10.根据权利要求7所述的提升转台大角度调转响应能力控制系统,其特征在于:所述速度控制回路包括速度回路控制器;所述位置控制回路包括位置回路控制器。
技术总结
本申请提供一种提升转台调转响应能力控制方法及系统,其中,控制方法包括以下步骤:获取转台的角度偏差θ
技术研发人员:陈立晶 赵宏斌 张旭 张美生
受保护的技术使用者:天津津航技术物理研究所
技术研发日:2021.12.22
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。