技术特征:
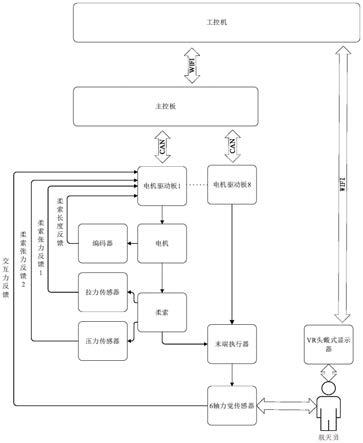
1.一种微重力环境模拟作业训练系统,其特征在于,包括:工控机、路由器、单人训练装置及vr头戴式显示器,所述单人训练装置由主控板、固定平台、8个柔索驱动单元、8根柔索、末端执行器组成;
①
所述工控机具有网卡,网卡与路由器进行通信,工控机与主控板之间采用wifi通信,主控板与柔索驱动单元的电机驱动板之间采用can通信,一个主控板对应8个伺服电机驱动板和一个六轴力觉传感器,一个伺服电力驱动板对应一个编码器、压力传感器、拉力传感器、温度传感器;
②
所述柔索驱动单元包括:伺服电机、拉力传感器、压力传感器、编码器、伺服电机驱动板,分别固接在固定平台的8个端点以控制平台位置模拟微重力环境;
③
所述末端执行器包括六轴力觉传感器,代表了虚拟任务物体的可握持部分,对应虚拟任务物体的作用位置,
④
工控机的上位机程序能实时渲染出虚拟任务场景画面输送至vr头戴式显示器。2.根据权利要求1所述一种微重力环境模拟作业训练系统,其特征在于:所述伺服电机驱动板包括电源模块,单片机最小系统、type-c供电电路、type-c下载电路、h桥电路、电流检测模块、温度检测模块、编码器接口、压力传感器接口、拉力传感器接口,将type-c接口接至工控机时,type-c只给5v及5v以下电源部分供电,此时可由专业上位机调试软件一键下载程序;电流检测模块能够检测流入电机的电流,当电流过高或过低时能够使pwm信号失能,并输出一个高电平至单片机某一引脚,由程序决定电流过高或过低的处理方案。3.根据权利要求1所述一种微重力环境作业训练系统,其特征在于:所述单人训练装置的主控板,包括电源模块、单片机最小系统、wifi模块、触摸屏、can通信模块、type-c下载电路、type-c供电电路,将type-c接口接至工控机时,type-c接口能为整个主控板供电,同时可由专业上位机调试软件一键下载程序;can通信有一条can总线,单片机通过can收发芯片接入can总线,9个can接口各通过一个can收发芯片接入can总线。4.根据权利要求3所述一种微重力环境作业训练系统,其特征在于:所述单人训练装置的主控板,具有j-link/j-tag下载电路,type-c下载优先于j-link/j-tag下载,所述type-c下载电路有type-c接口、usb转ttl电路,从type-c接口还引出一根信号线用于禁用j-link/j-tag下载电路,自动屏蔽j-link/j-tag下载。5.根据权利要求1所述的一种微重力环境模拟作业训练系统,其特征在于,所述电机驱动板具有电流检测模块和pwm功放模块使能判断电路,电流检测模块包括霍尔传感器模块、电流比较电路、电压压缩电路,电压压缩电路通过两级电压跟随运放模块和两个电阻构成,pwm功放模块使能判断电路能通过两个与门来处理单片机、电流比较电路、延迟电路的信号。6.根据权利要求1所述的一种微重力环境模拟作业训练系统,其特征在于,它的控制方法包括以下步骤:step1:当单人训练装置与工控机的上位机程序正常工作,通信良好时,上位机程序能够接收主控板传输的数据;step2:上位机程序调用用户自定义的物理算法算出航天员对末端执行器施加的交互力;step3:上位机程序调用内置物理引擎,将所述交互力添加到虚拟任务物体上,物理引
擎能计算出下一时刻虚拟物体的速度、惯性力、与航天员之间的交互力;step4:上位机调用用户自定义的物理算法,根据下一时刻虚拟物体的速度、惯性力、与航天员之间的交互力等信息进行柔索力分配分析,并计算出8组pwm波的占空比;step5:上位机将8组占空比格式化,通过wifi发送至主控板;step6:主控板将8组占空比通过can总线发送至电机驱动板;step7:电机驱动板接收到占空比数据,并输出pwm,功率放大后驱动h桥电路,控制伺服电机转动来改变单人训练装置中的固定平台位置;step8:末端执行器上的六轴力觉传感器能实时获取其与航天员之间的交互力并通过can通信传输至主控板,柔索驱动单元上有编码器,压力传感器,拉力传感器,所述三个传感器能实时获取电机转角、柔索拉力并传输至电机驱动板,电机驱动板上有温度传感器,能实时检测电机驱动板的温度,电机驱动板对接收数据进行格式化处理,并传输至主控板;step9:主控板有静态分配的内存以接收数据,主控板与8个柔索驱动单元连接,所以一块主控板对应八块电机驱动板,当接收到电机驱动板发来的格式化处理数据之后会进行格式检查,如果格式错误,则以0给所述内存重新赋值,如果格式正确则按:作用位置 电机驱动板1数据
…
电机驱动板8数据 六轴力觉传感器数据格式来格式化接收数据;经过step1至step9步骤后,主控板将接收数据内存中的数据通过wifi模块传输至工控机,若用户不退出程序,则循环执行step1-step9。7.根据权利要求6所述一种微重力环境作业训练系统,其特征在于,所述上位机采用的逻辑算法,包括:主线程、服务器线程、接收数据线程、发送数据线程、数据处理线程;
①
所述主线程启动会启动服务器线程,服务器线程启动会启动接收数据线程、发送数据线程和数据处理线程,每个线程都有接收消息缓存;
②
所述主线程包括物理计算、ui界面渲染、消息中心,
③
所述消息中心用以传递各个线程之间的消息,物理计算、画面渲染采、收发数据均使用不同的物理时间间隔,使物理计算、收发数据、与画面渲染彼此独立,在时间上互不影响,使得上位机具备渲染虚拟任务场景的vr场景并传输至vr头显功能。
技术总结
本发明是一种微重力环境模拟作业训练系统及其控制方法,训练系统包括:工控机、路由器、单人训练装置及VR头戴式显示器,所述单人训练装置由主控板、固定平台、8个柔索驱动单元、8根柔索、末端执行器组成;所述柔索驱动单元分别固接在固定平台的8个端点以控制平台位置,对应虚拟任务物体作用位置的末端执行器通过六轴力觉传感器接收航天员对其施加的交互力,工控机的上位机程序通过控制方法能实时渲染出虚拟任务场景画面输送至VR头戴式显示器及控制柔索驱动单元改变单人训练装置中的固定平台位置模拟微重力环境;单人训练装置可灵活调整实际场地,图像快速渲染使航天员在虚拟任务场景中看到训练实时信息,感受更直观,训练更高效。练更高效。练更高效。
技术研发人员:宋达 肖鑫磊 赵雷 孙志超 李刚 张立勋 薛峰
受保护的技术使用者:东北电力大学
技术研发日:2021.12.29
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。