基于c-v2x的关键场景生成方法、风险评估方法及系统
技术领域
1.本发明属于场景生成技术领域,涉及一种基于c-v2x的关键场景生成方法、风险评估方法及系统。
背景技术:
2.c-v2x场景的测试与评价主要通过以下几种方法进行:仿真测试、在环测试和道路测试。三种方法各有优缺点,仿真测试具有较高的成本效益,但难以准确模拟车辆动力学和道路环境。道路测试可获得最真实的测试结果,但效率极低,车辆必须行驶极远的路程才能验证其安全性。最根本的原因是,大多数道路上的场景不够关键,例如,如果想通过分析在有信号的十字路口下闯红灯车辆的安全性能(如事故率),可能需要通过数千个十字路口来积累足够多的事故事件,数据采集困难,也具有不安全性。与其他两种方法相比,在环测试不需要对车辆动力学进行详细的建模,它提供了比道路测试更可控、更安全的环境。此外,在环测试可大大提高测试效率,即以较少的测试次数获得相同精度的评价结果。尽管仿真测试和在环测试具有优势,但在部署前的道路测试仍然是不可替代的。
3.现有技术中,通过在模拟场景中合理设计和封闭的测试设施,可以减少道路测试的工作量。在中国专利公告号cn111741446a中,提供了一种v2x通信与应用联合测试方法和系统,该系统已实现进行应用测试的模拟,及通信和应用的联合测试,将融合感知平台采集到的数据形成模拟rv的bsm消息(backward set-up message,后向建立消息),来模拟不同位置和运动状态的rv,根据采集到的bsm消息,可以生成车辆的行驶轨迹,在这些轨迹数据中设置hv(host vehicle,主车)和rv(remote vehicle,远车),可对关键场景进行识别(如前向碰撞预警、变道预警、交叉路口碰撞预警)。但现有技术中,生成的测试场景中的hv是直接用测试车辆模拟或者直接用软件生成,没有具体地实现提取方法,出现数据的真实性不够,数据的计算量过于庞大等问题。现有技术评估风险等级时使用阈值来分类或二分类方法,评估结果不够完善。
技术实现要素:
4.本发明的目的在于提供一种基于c-v2x的关键场景生成方法、风险评估方法及系统,提高了数据处理速度和数据真实性。
5.为了达到上述目的,本发明的基础方案为:一种基于c-v2x的关键场景生成及风险评估方法,包括如下步骤:
6.采集原始数据,筛选出原始数据中车辆速度和加速度的异常值,将其替换为合适值;
7.使用滤波方法,清除原始数据中的车辆噪声;
8.从原始数据中提取出关键场景的疑似场景;
9.针对提取出的疑似场景,分别求出其对应场景的关键参数;
10.计算所有疑似场景的交通质量参数;
11.根据关键参数和交通质量参数,分别为每种关键场景的疑似场景进行聚类,评估其风险等级。
12.本基础方案的工作原理和有益效果在于:采集的原始数据中有部分车辆的速度值过大或者加速度值过大,这些异常值超出了实际驾驶情况中的正常值范围,本方案需要找出这些异常值,将其删除并且计算出合适的值来替代这些异常值,以防止这些数据帧中的速度值缺失,在后续识别关键场景时引起错误,提高数据的真实性。
13.为各种场景提取出疑似场景,减少处理数据的计算量同时让最终提取出的场景更具有代表性。为每个疑似场景计算出其对应关键场景的关键参数,然后计算出所有场景的交通质量参数,根据疑似场景的关键参数和交通质量参数来聚类分级,最终实现关键场景的识别和风险评估。将场景根据危险等级和交通质量两方面来进行评估分类,更好地描述了场景的特点。
14.进一步,筛选出原始数据中车辆速度和加速度的异常值,将其替换为合适值的方法如下:
15.对车辆坐标求一阶导数,得到车辆的速度分布曲线;
16.将车辆的速度分布曲线与原始的雷达采集的车辆速度曲线对比分析,筛选出两类异常值,第一类异常值是速度异常值,第二类异常值是加速度异常值,对这两类异常值删除之后,用拉格朗日多项式插值重新计算出值l(x)来代替异常值:
[0017][0018][0019]
其中,(x0,y0),(x1,y1),
…
(xk,yk)为速度或加速度的原始值,x对应着坐标,y对应着这个位置的取值,k为某个车辆速度或加速度原始值的个数,设第i个原始值为异常值,li(x)为计算出的代替该异常值的替代值。
[0020]
操作简单,利于使用。
[0021]
进一步,采用无迹卡尔曼滤波清除原始数据中的车辆噪声,方法如下:
[0022]
无迹卡尔曼滤波中过程噪声协方差q和测量噪声协方差r的设定将影响轨迹质量,其中q代表建模误差,r代表传感器采集误差,r根据具体型号毫米波雷达说明书的误差来设定,q被设定为一个非常小但不为零的常数;
[0023]
假设q的取值范围和步长递增,为了保证原轨迹的特性和结构特征,保证条件:
[0024]
信号能量比的计算方式为:
[0025][0026]
其中,x
original
(t)为原始信号,x
filtered
(t)为过滤后的信号;找出最小的信号能量比,保证车辆轨迹更加平滑。
[0027]
清楚数据噪声,利于后续数据处理。
[0028]
进一步,从原始数据中提取出关键场景的疑似场景的方法如下:
[0029]
提取前向碰撞预警的疑似场景:
[0030]
车辆轨迹的同车道前方有其他车辆且车头时距小于设定时间,若此情况维持在设定时间以上,将此场景视为疑似场景;
[0031]
对清除异常值后的数据中的车辆作遍历,将当前车辆作为hv,车道记为target,当前帧中其他车辆的车道信息用lane
other
表示,车道信息包括车辆编号id、车道编号lanenumber、经度信息long和维度信息lat:
[0032]
lane
other
={lane1,lane2,
…
,lanen}
[0033]
lane={id,lanenumber,long,lat}
[0034]
将lane
other
中车道编号与target相同的车道提取出,根据其经纬度和当前车辆的经纬度计算距离,取当前车辆前方且距离最近的一辆车为rv,计算hv和rv的车头时距t
thw
,
[0035][0036]
其中,xr为前后车辆的相对距离,vf为后车的速度,x
p
和xf分别为前后车的位置;
[0037]
若计算出的t
thw
小于设定时间,则将此hv和rv构成的场景视为疑似场景,保存这两辆车此时的轨迹数据;
[0038]
若lane
other
中没有一个的车道编号与target相同,则选取下一个车辆作为hv,循环执行提取前向碰撞预警疑似场景的操作;
[0039]
和/或提取变道预警的疑似场景:
[0040]
车辆轨迹的车道发生变化,且变道前后的两车道中本车的前后都存在其他车辆,将此场景视为疑似场景;
[0041]
对数据中的车辆作遍历,将当前车辆作为hv,判断hv在行驶过程中其车道有没有发生变化;
[0042]
若其车道发生了变化,将其变道前的车道记为lane
before
,变道后的车道记为lane
after
,判断hv在变道前后的两车道上时前后方有无其他车辆,若存在其他车辆并且后车与hv的车头时距小于设定时间,hv与前车的车头时距小于设定时间,将此场景视为疑似场景,把hv和相关的若干辆车的数据进行保存;
[0043]
和/或提取交叉路口碰撞预警的疑似场景:
[0044]
根据经纬度信息将交叉路口划分为若干个网格,将车辆轨迹分布在网格信息上,令有车辆经过的网格的值为1,没有车辆经过的网格值为0,遍历数据中的车辆,记当前车辆为hv;
[0045]
计算出hv的网格矩阵,令hv进入交叉路口的时间为t1,hv离开交叉路口的时间为t2;
[0046]
筛选出t1和t2之间也处于交叉路口的其他车辆,计算出这些车辆的网格矩阵,并与hv的网格矩阵比较,若有相同位置的值都为1,则令此车辆为rv,与hv构成疑似场景,将这两辆车的数据进行保存。
[0047]
分别提取出对应关键场景的疑似场景,提高了数据处理速度,保证了提取出场景足够关键,为后续的场景风险评估做好了数据准备。
[0048]
进一步,得到疑似场景的关键参数的方法如下:
[0049]
前向碰撞预警疑似场景的关键参数包括hv和rv的碰撞时间倒数t
ittc
、车头时距t
thw
和修正碰撞裕度t
mtc
:
[0050][0051][0052][0053]
其中,xr,vr分别为前后车辆的相对距离和相对速度,x
p
和xf分别为前车和后车的位置,且x
p
》xf;v
p
和vf分别为前车和后车的速度;af和a
p
分别为前车和后车的加速度;df和d
p
分别为前车和后车按照加速度减速至停车时的刹车距离;
[0054]
变道预警疑似场景的关键参数包括原始车道hv和前车、原始车道hv后车和hv、变道后车道hv和前车、变道后车道hv后车和hv的碰撞时间倒数t
ittc
、车头时距t
thw
、修正碰撞裕度t
mtc
;
[0055]
交叉路口碰撞预警疑似场景的关键参数包括风险评价指标a
require
和碰撞时间倒数t
ittc
,假定hv以当前状态匀加速运动到碰撞点所需的时间为t,计算rv以时间t到达碰撞点所需的加速度,计算公式如下:
[0056][0057][0058]
其中,vh和vr分别为hv和rv的速度,ah为hv的加速度,dh和dr分别为hv和rv到碰撞点的距离。
[0059]
为每个疑似场景计算出其对应关键场景的关键参数,操作简单,便于运算。
[0060]
进一步,计算所有疑似场景的交通质量参数的方法如下:
[0061]
设宏观交通质量参数为d,主车预设范围之内车辆的交通密度:
[0062]
d=v
p
/s
[0063]
其中,v
p
表示交通流量,s代表平均旅行速度;
[0064]
设微观交通质量参数为cvj,考虑主车预设范围之内的车辆速度标准差和平均速度:
[0065][0066]
其中,σ
vj
代表车辆速度标准差,代表车辆的平均速度;
[0067]
纳观交通质量参数为dvj,考虑主车预设范围之内的车辆速度标准差和平均速度:
[0068][0069]
σ
vcircle,j
代表车辆速度标准差,代表车辆的平均速度;
[0070]
本车质量参数为d
egoj
,考虑hv的交通质量:
[0071][0072]
σ
vego,j
代表hv速度标准差,代表hv的平均速度。
[0073]
计算出所有场景的交通质量参数,便于后续使用。
[0074]
进一步,根据关键参数和交通质量参数,利用k-均值聚类算法,为每种关键场景的疑似场景进行聚类,并评估每个场景的风险等级;
[0075]
将各个场景的关键参数和交通质量参数通过k-均值聚类算法分类,随机生成聚类中心,计算场景中的参数到各个聚类中心的欧氏距离,按照距离最近的准则将他们分到离他们最近的聚类中心所对应的类别;
[0076]
将每个类别中所有对象计算出的均值,作为该类别新的聚类中心;
[0077]
若聚类中心出现变化,则重复以上操作,直至聚类中心不再变化为止;
[0078]
最终根据聚类中心关键参数和交通质量参数的大小将场景划分风险等级。
[0079]
使用k-均值聚类方法对场景进行风险评估,操作简单,便于使用。
[0080]
进一步,划分风险等级:安全-交通质量好、一般危险-交通质量好、高度危险-交通质量好、安全-交通质量一般、一般危险-交通质量一般、高度危险-交通质量一般、安全-交通质量差、一般危险-交通质量差、高度危险-交通质量差。
[0081]
设置对应的风险等级,便于评估操作。
[0082]
本发明还提供一种基于c-v2x的关键场景的疑似场景生成方法,包括如下步骤:
[0083]
采集原始数据,筛选出原始数据中车辆速度和加速度的异常值,将其替换为合适值;
[0084]
使用无迹卡尔曼滤波,清除原始数据中的车辆噪声;
[0085]
从原始数据中提取出3种关键场景的疑似场景。
[0086]
在原始数据中进行筛选,设定合适的hv,提取出关键场景的疑似场景,操作简单,利于使用。
[0087]
本发明还提供一种基于c-v2x的关键场景生成及风险评估系统,包括原始数据获取模块和处理模块,所述原始数据获取模块用于采集原始数据,原始数据获取模块的输出端与处理模块的输入端连接,所述处理模块执行本发明所述方法,进行场景生成及风险评估。
[0088]
该系统通过提取出关键场景的疑似场景,再对其进行风险评估,提高了数据处理速度,同时也保证了提取出场景足够关键。
附图说明
[0089]
图1是本发明基于c-v2x的关键场景生成及风险评估方法的流程示意图;
[0090]
图2是本发明基于c-v2x的关键场景生成及风险评估方法的前向碰撞预警疑似场景提取流程图;
[0091]
图3是本发明基于c-v2x的关键场景生成及风险评估方法的变道预警疑似场景提取流程图;
[0092]
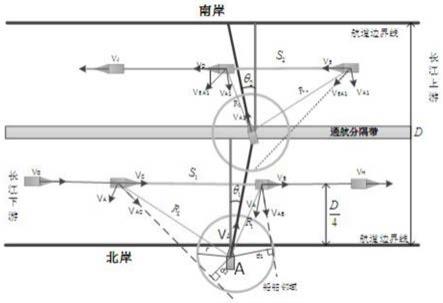
图4是本发明基于c-v2x的关键场景生成及风险评估方法的交叉路口碰撞预警疑
交通质量好、安全-交通质量一般、一般危险-交通质量一般、高度危险-交通质量一般、安全-交通质量差、一般危险-交通质量差、高度危险-交通质量差。
[0103]
本发明的一种优选方案中,筛选出原始数据中车辆速度和加速度的异常值,将其替换为合适值的方法如下:
[0104]
对车辆坐标求一阶导数,得到车辆的速度分布曲线;
[0105]
将车辆的速度分布曲线与原始的雷达采集的车辆速度曲线对比分析,筛选出两类异常值,第一类异常值是速度异常值:速度太突出,远远高于临近帧速度;第二类异常值是加速度异常值,第二类异常值与第一类异常值相比数值变化比较平缓,但此处的加速度值会超出车辆性能和人体的承受度[-8m/s2,5m/s2]。对这两类异常值删除之后,用拉格朗日多项式插值重新计算出值l(x)来代替异常值:
[0106][0107][0108]
其中,(x0,y0),(x1,y1),
…
(xk,yk)为速度或加速度的原始值,x对应着坐标,y对应着这个位置的取值,k为某个车辆速度或加速度原始值的个数,设第i个原始值为异常值,li(x)为计算出的代替该异常值的替代值。
[0109]
本发明的一种优选方案中,替换掉数据中的异常值后,使用无迹卡尔曼滤波来清除车辆噪声,无迹卡尔曼滤波中过程噪声协方差q和测量噪声协方差r的设定将影响轨迹质量。清除原始数据中的车辆噪声的方法如下:
[0110]
无迹卡尔曼滤波中过程噪声协方差q和测量噪声协方差r的设定将影响轨迹质量,其中q代表建模误差,r代表传感器采集误差,r根据具体型号毫米波雷达说明书的误差来设定,q被设定为一个非常小但不为零的常数;
[0111]
假设q的取值范围为[0,1],并以0.01的步长递增,为了保证原轨迹的特性和结构特征,保证条件:
[0112]
过滤后信号能量比不小于95%,信号能量比的计算方式为:
[0113][0114]
其中,x
original
(t)为原始信号,x
filtered
(t)为过滤后的信号;找出最小的信号能量比,保证车辆轨迹更加平滑;
[0115]
过滤后的加速度绝对值小于5m/s2。
[0116]
本发明的一种优选方案中,从原始数据中提取出3种关键场景的疑似场景的方法如下:
[0117]
如图2所示,提取前向碰撞预警的疑似场景:
[0118]
车辆轨迹的同车道前方有其他车辆且车头时距小于设定时间,优选为5秒,若此情况维持5秒以上,将此场景视为疑似场景;
[0119]
对清除异常值后的数据中的车辆作遍历,将当前车辆作为hv,车道记为target,当前帧中其他车辆的车道信息用lane
other
表示,车道信息包括车辆编号id、车道编号lanenumber、经度信息long和维度信息lat:
[0120]
lane
other
={lane1,lane2,
…
,lanen}
[0121]
lane={id,lanenumber,long,lat}
[0122]
将lane
other
中车道编号与target相同的车道提取出,根据其经纬度和当前车辆的经纬度计算距离,取当前车辆前方且距离最近的一辆车为rv,计算hv和rv的车头时距t
thw
,
[0123][0124]
其中,xr为前后车辆的相对距离,vf为后车的速度,x
p
和xf分别为前后车的位置;
[0125]
若计算出的t
thw
小于5秒,则将此hv和rv构成的场景视为疑似场景,保存这两辆车此时的轨迹数据;
[0126]
若lane
other
中没有一个的车道编号与target相同,则选取下一个车辆作为hv,循环执行提取前向碰撞预警疑似场景的操作。
[0127]
如图3所示,提取变道预警的疑似场景:
[0128]
车辆轨迹的车道发生变化,且变道前后的两车道中本车的前后都存在其他车辆,将此场景视为疑似场景;
[0129]
对数据中的车辆作遍历,将当前车辆作为hv,判断hv在行驶过程中其车道有没有发生变化;
[0130]
若其车道发生了变化,将其变道前的车道记为lane
before
,变道后的车道记为lane
after
,判断hv在变道前后的两车道上时前后方有无其他车辆,若存在其他车辆并且后车与hv的车头时距小于5秒,hv与前车的车头时距小于5秒,将此场景视为疑似场景,把hv和相关的4辆车的数据进行保存。
[0131]
如图4所示,提取交叉路口碰撞预警的疑似场景:
[0132]
根据经纬度信息将交叉路口划分为若干个网格如图5所示,将车辆轨迹分布在网格信息上,令有车辆经过的网格的值为1,没有车辆经过的网格值为0,遍历数据中的车辆,记当前车辆为hv;
[0133]
计算出hv的网格矩阵,令hv进入交叉路口的时间为t1,hv离开交叉路口的时间为t2;
[0134]
筛选出t1和t2之间也处于交叉路口的其他车辆,计算出这些车辆的网格矩阵,并与hv的网格矩阵比较,若有相同位置的值都为1,则令此车辆为rv,与hv构成疑似场景,将这两辆车的数据进行保存。
[0135]
本发明的一种优选方案中,得到疑似场景的关键参数的方法如下:
[0136]
前向碰撞预警疑似场景的关键参数包括hv和rv的碰撞时间倒数t
ittc
、车头时距t
thw
和修正碰撞裕度t
mtc
(描述前车突然刹车时,为避免发生碰撞,后车驾驶人进行刹车操作之前的反应时间):
[0137]
[0138][0139][0140]
其中,xr,vr分别为前后车辆的相对距离和相对速度,x
p
和xf分别为前车和后车的位置,且x
p
》xf;v
p
和vf分别为前车和后车的速度;af和a
p
分别为前车和后车的加速度,通常定义为0.7g;df和d
p
分别为前车和后车按照0.7g加速度减速至停车时的刹车距离;
[0141]
变道预警疑似场景的关键参数包括原始车道hv和前车、原始车道hv后车和hv、变道后车道hv和前车、变道后车道hv后车和hv的碰撞时间倒数t
ittc
、车头时距t
thw
、修正碰撞裕度t
mtc
;
[0142]
交叉路口碰撞预警疑似场景的关键参数包括风险评价指标a
require
和碰撞时间倒数t
ittc
,假定hv以当前状态匀加速运动到碰撞点所需的时间为t,计算rv以时间t到达碰撞点所需的加速度,计算公式如下:
[0143][0144][0145]
其中,vh和vr分别为hv和rv的速度,ah为hv的加速度,dh和dr分别为hv和rv到碰撞点的距离。
[0146]
本发明的一种优选方案中,计算所有疑似场景的交通质量参数的方法如下:
[0147]
设宏观交通质量参数为d,主车450m围之内车辆的交通密度:
[0148]
d=v
p
/s
[0149]
其中,v
p
表示交通流量,s代表平均旅行速度;
[0150]
设微观交通质量参数为cvj,考虑主车450m范围之内的车辆速度标准差和平均速度:
[0151][0152]
其中,σ
vj
代表车辆速度标准差,代表车辆的平均速度;
[0153]
纳观交通质量参数为dvj,考虑主车100m范围之内的车辆速度标准差和平均速度:
[0154][0155]
σ
vcircle,j
代表车辆速度标准差,代表车辆的平均速度;
[0156]
本车质量参数为d
egoj
,考虑hv的交通质量:
[0157][0158]
σ
vego,j
代表hv速度标准差,代表hv的平均速度。
[0159]
本发明的一种优选方案中,根据关键参数和交通质量参数,利用k-均值聚类算法,
为每种关键场景的疑似场景进行聚类,并评估每个场景的风险等级。
[0160]
将各个场景的关键参数和交通质量参数通过k-均值聚类算法分类,随机生成聚类中心,计算场景中的参数到各个聚类中心的欧氏距离,按照距离最近的准则将他们分到离他们最近的聚类中心所对应的类别。将每个类别中所有对象计算出的均值,作为该类别新的聚类中心。若聚类中心出现变化,则重复以上操作,直至聚类中心不再变化为止。最终根据聚类中心关键参数和交通质量参数的大小将场景划分风险等级。
[0161]
本发明还提供一种基于c-v2x的关键场景的疑似场景生成方法,包括如下步骤:
[0162]
采集原始数据,筛选出原始数据中车辆速度和加速度的异常值,将其替换为合适值。使用无迹卡尔曼滤波,清除原始数据中的车辆噪声。从原始数据中提取出3种关键场景的疑似场景,该疑似场景生成方法的具体步骤可采用上述方法中的提取疑似场景的内容。
[0163]
本发明还提供一种基于c-v2x的关键场景生成及风险评估系统,包括原始数据获取模块和处理模块,原始数据获取模块用于采集原始数据,原始数据获取模块的输出端与处理模块的输入端连接,处理模块执行本发明所述方法,进行场景生成及风险评估。
[0164]
本方案主要是对原始数据进行处理,从中提取出各种关键场景的疑似场景,然后计算各场景的关键参数和交通质量参数,最后聚类对场景进行风险等级评估。首先在原始数据中进行筛选,设定合适的hv,提取出关键场景的疑似场景,再对其进行风险评估,提高了数据处理速度,同时也保证了提取出场景足够关键,为后续的场景风险评估做好了数据准备。在对场景风险评估时,使用了k-均值聚类方法,同时加入了交通质量参数,将场景根据危险等级和交通质量两方面来进行评估分类,更好地描述了场景的特点。
[0165]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0166]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。