1.本发明属于船舶智能决策的技术领域,尤其涉及一种基于船舶交通流的内河渡线会遇风险识别及决策方法。
背景技术:
2.长江最为我国重要的黄金水道,其船舶的交通流密度在运力和运量逐渐提升的基础上变得稠密。虽然在某些人口密集区域会有桥梁和隧道等形式的过河通道,但受水深条件及过河通道坡度及经济性等的影响,桥隧等过河方式并不一定适应所有水域,因而在一定时间范围内渡线的存在仍不可替代。连接长江两岸的渡船在日益增长的船舶交通流下不可避免地会与顺航道航行船舶之间产生会遇局面的频率有所增加,进而使得会遇风险不断提升。基于此,渡线在不同船舶交通流条件下产生的会遇风险会有较大差异。现行规划渡线的方式仅仅以点对点的方式进行,一般以“|”、“/”和“\”为主,极少数水域会出现“>”或“<”类型,而规划渡线线型一般以人口密集区和建设条件为依据,极少考虑到交通流对渡线的会遇风险影响。而渡线的时长间隔,除了考虑实际需要渡江人数外,还应考虑实际水域船舶交通流条件,应在安全和效率之间权衡。否则,密集的渡线计划与实际船舶交通流会形成较大会遇风险,需要进行风险识别与决策,确定基于效率和安全的最佳的渡线方案。
技术实现要素:
3.本发明所要解决的技术问题在于针对上述存在的问题,提供一种基于船舶交通流的内河渡线会遇风险识别及决策方法,对渡线方案与实际船舶交通流的会遇风险进行识别和决策,提出满足效率和安全的渡线方案。
4.本发明解决上述技术问题所采用的技术方案是:基于船舶交通流的内河渡线会遇风险识别及决策方法,其特征包括如下步骤:
5.s1)确定基于视觉投影的船舶碰撞态势模型:
6.利用速度的叠加原理将本船的运动速度叠加至来船上,来船的运动速度为相对恒定合速度v,并且拟以相对恒定合速度通过船舶领域,两会遇船舶的连线的距离s为两船的相对距离,将本船与来船的相对速度与相对距离利用黎曼球面进行视觉投影,搭建出非欧空间下的船舶会遇模型,将实时的船舶碰撞风险进行可视化呈现;
7.s2)搭建二维平面横渡船渡江模型:
8.a、渡船a穿越长江下游上行船交通流会遇模型分析;
9.b、渡船a穿越长江上游下行船交通流会遇模型分析;
10.c、渡船a的横渡模型;
11.s3)渡船a穿越顺航道的船舶的会遇风险分析。
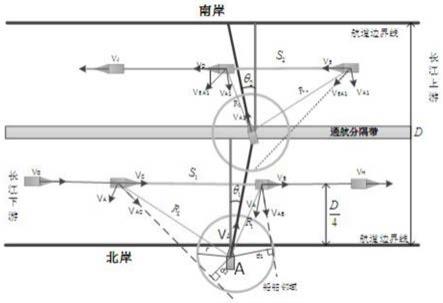
12.按上述方案,步骤s2中所述渡船a穿越长江与顺航道船舶交通流分析包括渡船a与顺航道的下游上行船舶的两船与船舶a抵达航道通航分隔带时会遇长江上游下行船舶两种会遇场景:
13.a、渡船a在长江北岸,长江北岸的航道宽度为渡船a距离航道内通航船舶的垂直距离为已知渡船a的船速为va,舶领域的半径为r。渡船a在渡江的过程中会遇船舶b与船舶c,船舶b与船舶c的船舶间隙为s1,长江下游上行交通流前方的船舶b的船速为vb与渡船a的相对距离为r1,经速度的合成得到船舶b相对于渡船a的航速的航速为v
ab
,后边船舶c的航速为vc,与渡船a的相对距离为r2,经速度的合成得到船舶c 相对于渡船a的航速为v
ac
,假定下游上行交通流的流向为090
°
,渡船为了在密集交通流安全横渡应采取合适的渡船时机以及合适的横渡角θ1;
14.b、渡船a从长江北岸航行至通航分隔带时,允许渡船在通航分隔带短暂的停留,以便进行航向和航速的改变或者等待合适的渡船时机,渡船a在抵达通航分隔带之后进行航向与航速的改变,此时渡船a的航速为v
a1
,渡船将会遇长江上游下行的船舶,左舷船舶d,右舷船舶e和船舶f,船舶d与船舶e的船舶间隙为s2,船舶d的航速为vd,将渡船的航速与船舶d的航速进行速度的合成得到在相对运动中船舶d的运动速度为v
da1
,两船之间相对距离为r3。同理,后船e的运动速度为ve,经过速度的合成,船舶e在相对于渡船a的相对运动下的合速度为v
ea1
,两船之间的平面相对距离为r4,船f的运动速度为vf,经过速度的合成,船舶f在相对于渡船a的相对运动下的合速度为v
fa1
,两船之间的平面相对距离为r5,假定长江上游下行的船舶的航向为270
°
,渡船a为了安全横渡采取的横渡角θ2。
15.按上述方案,步骤s3所述渡船a穿越顺航道的船舶的会遇风险分析包括两种情况:
16.a、渡船a穿越顺航道的上行船舶的会遇风险分析:
17.a1:针对长江下游上行的船舶航速根据不同船舶差异以及不同的水流气象条件,选取不同的船速进行讨论,计算渡船的会遇风险对交通流船舶间隙的计算范围,计算过程中分别对船舶间隙取不同的间隔距离进行计算,在第一段渡船穿越下游上行船舶的航段时,根据采取的渡船横渡角,得出最终会遇风险场景为s*v
t
*θ
t
种情况;
18.a2:将上述航道通航信息导入matlab渡江模型会遇风险平台中可分别计算出在不同交通流流速、船舶间隙以及渡船横渡角下渡船与航道内船舶的会遇风险,将matlab得到的会遇风险进行统计分级得到三种渡线等级,即非常危险、危险、安全,利用风险分层等级对不同交通流航速下的会遇情况渡船采取的渡线方案进行标注与评定该渡线的风险等级,选取风险等级最小的模型进行横渡;
19.b、渡船a穿越顺航道的下行船舶的碰撞风险分析:
20.b1:渡船a进入到通航分隔带内,将会面临从长江上游下行的船舶交通流,本专利在具体计算中分别选取船舶不同的交通流进行计算,由于渡船会遇的船舶是长江上游下行的船舶交通流,所以在交通流航速的选择上将会大于渡船面对长江下游上行船舶交通流航速,渡船抵达航道通航分隔带时可以选择短暂停留以等待合适的渡船时机或者调整到合适的渡船角度,若渡船时机成熟也可采取直接横渡,横渡角角度为左舷或右舷与通航分隔带有较小的夹角时横渡,最终渡船最终会遇风险场景为s*v
t
*θ
t
种情况;
21.b2:在渡线时机选择上选取的渡线时机为当交通流的三船的首船船舶渡船与长江彼岸的垂向线时,渡船开始横渡,经计算当前船d船舶渡船垂向线时渡船采取横渡角为上述角度时与渡船的会遇风险值小于0.01,对上游下行船舶交通流计算时不考虑渡船与首船的
会遇风险,当船舶间隙较小时船舶e顺利通过渡船船首,船舶f会与渡船之间的会遇风险较高,重点分析渡船a与船舶f之间的会遇风险,以求得最佳渡线。
22.按上述方案,所述横渡角θ1的取值范围为θ1∈[0,40],所述横渡角θ2取值范围为θ2∈[320,360]∪[0,40]。
[0023]
本发明的有益效果是:提供一种基于船舶交通流的内河渡线会遇风险识别及决策方法,现有渡线方案仅考虑人口密集区和建设条件,并未考虑船舶交通流的巨变,其会遇安全及适应性堪忧。渡线方案(渡线间隔时长及渡线路径)与船舶会遇风险感知及决策需要构建新的模型进行量化研究。通过构建基于视觉感知的船舶会遇风险模型,将之与传统模糊综合风险评价模型进行类比,对渡线方案与实际船舶交通流的会遇风险进行识别和决策,提出满足效率和安全的渡线方案,对现有风险较大的渡线方案进行优化,并提出实际船舶交通流与渡线方案的匹配原则与量化计算方法。
附图说明
[0024]
图1为本发明一个实施例的二维平面下船舶运动情况示意图。
[0025]
图2为本发明一个实施例的基于投影变换的船舶相对运动线轨迹投影图。
[0026]
图3为本发明一个实施例的渡船a穿越顺航道的场景图。
[0027]
图4为本发明一个实施例的渡船a穿越顺航道的上行船舶模型图。
[0028]
图5为本发明一个实施例的渡船a穿越顺航道的下行船舶模型图。
具体实施方式
[0029]
为更好地理解本发明,下面结合附图和实施例对本发明作进一步的描述。
[0030]
1.构建基于视觉投影的船舶碰撞态势模型
[0031]
在二维平面下船舶运动情况如图1所示,利用速度的叠加原理将本船的运动速度叠加至他船上,他船的运动速度为相对恒定合速度v,并且拟以相对恒定合速度通过船舶领域。两会遇船舶的连线的距离s为两船的相对距离,相对恒定合速度在相对距离连线的分量大小为两船之间的相对速度。随着他船不断向本船靠近时,值班驾驶员依据自身投影成像感知体系,通常通过感知他船相对于本船的相对距离与相对速度的变化来感知是否有碰撞风险,即会遇风险的感知中往往通过本船与他船相对速度和相对距离来衡量。
[0032]
1.1平面下船舶会遇时船舶之间相对距离与相对速度之间的关系
[0033]
在二维平面下,会遇船舶的相对距离是指在船舶运动的相对矢量线上两船之间的距离。船舶会遇时由于本船与来船相向运动,所以最初假设来船与本船会遇时t0时刻的相对距离为在会遇相对矢量运动线上,两船之间的相对距离是不断减小的。 t1时刻两船相对距离为其中δt为初始时刻到t1时刻的时间间隔,则由于tcpa>δt,所以即两船向本船不断运动的过程中两船之间的相对速度是呈现不断减小的变化趋势。
[0034]
相对速度同样也是描述两船碰撞紧迫程度的特征量。相对速度的计算过程分为如下几步:首先将本船的速度叠加至来船上进行速度的合成,在本船和他船保速保向的基础
上为恒定合速度v;其次,将恒定合速度v投影到船舶运动的相对矢量线(相对距离连线)上。此时的投影速度即为相对速度。假设两船的运动合速度方向将经过本船的船舶领域(即两船有会遇风险),同时合速度方向与两船之间连线的夹角为θ时,两船的相对速度的大小为v0=vcosθ,初始时刻t0的相对速度大小为所以该情况下 t1时刻相对速度大小为由于夹角θ∈(0,90
°
],且θ值随两船逐渐接近而不断接近90
°
,因此cosθ值随两船逐渐接近而不断减小,即两船之间的相对速度的大小是不断呈现递减趋势,对该相对速度进行求导得到相对速度的变化率即两船在不断接近的过程中,相对速度的降低使得两船间会遇风险感知随之不断减小。
[0035]
1.2.搭建基于非欧几里得空间的船舶会遇模型。
[0036]
1)速度的叠加
[0037]
运用运动速度的合成原理,将本船b的运动速度叠加至来船a上,将两速度进行矢量的合成得出来船的合速度v。
[0038]
2)建立黎曼球面
[0039]
运用mobius变换和非欧几何学的原理,在本船b上方建立黎曼球面,以o点作为球的三维直角坐标系的原点,点o
′
作为球的最高点,球的半径暂定为5倍的船长(其长度大约为船舶邻域的半径)。由于本船相对静止,来船a将在l1上做直线运动。船舶a在l1上运动时运用黎曼球面将船舶a所在的点p与点o
′
相连接,此连线与球面相交的点为点q,该点为来船a在球面上的投影点。在来船a不断在l1上运动时运动时,直线o
′
p会在黎曼球面上切割产生一段圆弧o
′
′q″
。
[0040]
3)利用保形变换求解相对速度v
oq
与相对距离s
[0041]
运用保形变换的思想,通过相关的几何证明易得到,在p点运动时δo
′
op与δoqo
′
的互为相似三角形,通过变换将p点与o点连线的速度vpo进行变换到δoqo
′
中δoqo
′
点与 q点连线的速度vqo,同时将平面上的op之间的距离转换至oq之间的距离,搭建模型如图 2所示。
[0042]
1.3.计算基于非欧几里得空间的船舶间相对速度与相对距离
[0043]
a.在上述非欧几何空间的船舶会遇模型搭建的过程中,球面相对速度是通过对投影点q的空间坐标进行求导,得到投影点q在投影圆弧上的运动速度将投影点q的运动速度投影至oq直线上得到来船在非欧空间上相对于本船的相对运动速度
[0044]
b.在平面下两船之间的相对距离为两船之间的地理位置之间的距离,利用非欧空间球面投影将平面上来船的位置点投影至空间球面上的q上,两船之间的平面相对距离op
投影至空间球面上转化为投影点q到本船的o的球面空间位置oq。通过上述非欧几何空间的船舶会遇模型搭建的过程中可得两船空间球面相对距离为
[0045]
1.4.计算基于非欧几里得空间的船舶会遇风险。
[0046]
利用上述球面相对速度与相对距离建立基于视觉投影的船舶会遇风险模型,由于在描述球面会遇风险更加符合值班驾驶员的视觉感知,即随着两船相互驶近时,相对速度影响因子与相对距离影响因子都是促成会遇风险增加的因素,所以对球面相对距离进行归一化时利用初始球面相对距离与实时的球面相对距离的差值描述相对距离对会遇风险增加趋势。所以,将影响会遇风险的两个重要指标进行归一化处理,球面相对速度归一化处理得到球面相对距离归一化处理得到两船的会遇风险利用两个影响因子相乘的积表示,即risk=kv*ks。
[0047]
2.搭建二维平面横渡船渡江模型。
[0048]
实施例一
[0049]
如图3所示,已知该航段航道总宽度为d,取航道总宽度为2000m,通航分隔带将航道一分为二,北岸航道和南岸航道均为即1000m。假设航道内的船舶交通流在航道中部航行,则船舶交通流距离航道边界的距离为即500m。在航道内航行的船舶交通流的航速为v,长江下游上行的交通流航速范围取8kn、9kn、10kn,长江上游下行船舶的航速范围取10kn、11kn、12kn。交通流内船舶间隙为s,交通流船舶间隙范围取300m、400m、500m、 600m。已知渡船a的船速为va,为了渡船有限横渡长江,选取渡船的横渡航速为10kn,由于长江交通流较为密集,横渡过程中渡船与交通流船舶之间的船舶距离一般较近,故选取船舶邻域的半径为r,该半径为其中为渡船的船长为22m,为航道内交通流内船舶一般取50m,当交通流内船舶侵入渡船的船舶领域时,说明两船之间即将发生碰撞事故或已经发生碰撞事故。
[0050]
对于较为密集的船舶角交通流时渡船采取横渡的方式往往与航道内通航的船舶之间的会遇风险较大,所以为了使渡船安全的横渡长江应在合适的渡船时机渡江,即选取合适的交通流船间隙和采取合适的横渡角。
[0051]
3.渡船a穿越长江与顺航道船舶交通流分析
[0052]
3.1北岸渡船a穿越长江下游上行船舶交通流分析
[0053]
渡船a在长江北岸,长江北岸的航道宽度为渡船a距离航道内通航船舶的垂直距离为已知渡船a的船速为va,舶领域的半径为r。渡船a在渡江的过程中会遇船舶 b与船舶c。船舶b与船舶c的船舶间隙为s1,长江下游上行交通流前方的船舶b的船速为vb与渡船a的相对距离为r1,经速度的合成得到船舶b相对于渡船a的航速的航速为 v
ab
。后边船舶c的
航速为vc,与渡船a的相对距离为r2,经速度的合成得到船舶c相对于渡船a的航速为v
ac
。因为采取横渡的方式,下游上行交通流的流向为090
°
。渡船为了在密集交通流安全横渡应采取合适的渡船时机以及合适的横渡角θ1,横渡角θ1的取值范围为θ1∈[0,40]。具体渡船穿越场景图下图4所示。
[0054]
3.2北岸渡船a穿越长江上游下行船舶交通流分析
[0055]
渡船a从长江北岸航行至通航分隔带时,允许渡船在通航分隔带短暂的停留,以便进行航向和航速的改变以及等待合适的渡船时机。渡船a在抵达通航分隔带之后进行航向与航速的改变,此时渡船a的航速为v
a1
,渡船将会遇长江上游下行的两船,船舶d与船舶e,两船之间的船舶间隙为s2。船舶d的航速为vd,将渡船的航速与船舶d的航速进行速度的合成得到在相对运动中船舶d的运动速度为v
da1
,两船之间相对距离为r3。同理,后船e 的运动速度为ve,经过速度的合成,船舶e在相对于渡船a的相对运动下的合速度为v
ea1
,两船之间的平面相对距离为r4。船f的运动速度为vf,经过速度的合成,船舶f在相对于渡船a的相对运动下的合速度为v
fa1
,两船之间的平面相对距离为r5。规定长江上游下行的船舶的航向为270
°
。渡船a为了安全横渡采取的横渡角θ2,横渡角θ2取值范围为θ2∈[320,360]∪[0,40],具体渡船穿越场景图下图5所示。
[0056]
4.1渡船a穿越顺航道的上行船舶的碰撞风险分析
[0057]
将渡船横渡的会遇风险结果分成三层,分别为航道交通流流速为8kn、9kn、10kn。每种情况下分别对船舶间隙为300m、400m、500m、600m下横渡角为θ∈[0,40]进行计算,上述条件不变,具体穿越场景图如图4-1所示。
[0058]
4.1.2会遇风险等级分析
[0059]
将渡船在航道内交通流航速为8kn、9kn、10kn的情况下,当交通流内船舶间隙为300m、 400m、500m、600m的情况下渡船采取θ∈[0,40]的横渡角进行横渡,将渡船与交通流内的船舶b和船舶c的会遇风险最大值进行统计分析,统计的渡线情况总共为492条渡线方案,每条渡线上有渡船与船舶b和船舶c会遇风险最大值,即共有984个会遇风险结果,将会遇风险从0.1进行分级,间隔为0.1。
[0060]
通过对以上渡船在三种交通流航速下分析结果得到,当渡船穿越长江下游上行船舶时船舶交通流航速为v=[8kn,9kn,10kn]时,船舶间隙在300m时,交通流航速为该范围之内时可选的横渡角为θ∈[0,2]∪[37,40]。此时渡船可选择的横渡角范围为5
°
,在此情况下渡船驾驶员应谨慎驾驶,特别关注航道内船舶的航速,及时调整到合适的横渡角渡江,或者等待船舶间隙较大时进行渡江。在船舶间隙为400m时,可选横渡角为θ∈[23,40]。此时可选渡角为17
°
相比船舶间隙300m时可通航的时机以及会遇局面紧迫程度较小。当船舶间隙为500m时,可选横渡角范围为θ∈[11,40],此时渡船横渡过程可选的横渡角明显增加。当船舶间隙达到600m时,渡船可以在规定就横渡角内任意选择。通过以上分析得到船舶间隙越大时,渡船能够顺利横渡的几率较大,并且会遇风险较低。经统计在交通流航速为8kn 时,上述渡线方案中可航渡线为133种,9kn时有121种,10kn时有105种,所以一定程度上说明航道内船舶交通流航速越低,渡船能够顺利横渡的几率较大。其结果如表一表二表三所示:
[0061]
表一
[0062]
[0063]
[0064]
[0065][0066]
表二
[0067]
[0068]
[0069][0070]
表三
[0071]
[0072]
[0073]
[0074][0075]
4.2渡船a穿越顺航道的下行船舶的碰撞风险分析
[0076]
渡船从长江北岸抵达航道的通航分隔带时将会面临从长江上游下行的船舶交通流。通过matlab仿真计算对航道交通流为10kn、11kn、12kn时的船舶间隙为300m、400m、500m、 600m,渡船自身横渡角为θ∈[320,360]∪[0,40]下渡船与船舶e和船舶f的会遇风险最大值进行统计得到渡船穿越下行交通流航速为10kn渡船与船舶e和船舶f的会遇风险。在船舶间隙在300m时渡船可选择的横渡角范围为θ∈[0,20]∪[27,40],表明渡船在到达通航分隔带时若渡船时机符合条件可直接采取斜线渡线。当船舶间隙在400m时,渡船可选的横渡角范围在θ∈[320,359]∪[0,1]∪[18,40],此时渡船到达通航分隔带时可选择“v”型渡线方案或者采取大角度斜线渡线方案横渡。当船舶间隙在500m时,渡船可选横渡角范围在θ∈[320,344]∪[9,40],说明此时渡船可选择“v”型渡线方案或者采取大角度斜线渡线方案进行渡江。当船舶间隙达到600m时,横渡角可选范围为θ∈[0,40],所以渡船应采取斜线渡线方案。其结果如表四表五表六所示:
[0077]
表四
[0078]
[0079]
[0080]
[0081][0082]
表五
[0083]
[0084]
[0085]
[0086][0087]
表六
[0088]
[0089]
[0090]
[0091][0092]
综上所述,在长江上游下行交通流航速在v∈[10kn,12kn]时,船舶间隙在300m时,
渡船的通用横渡角选择的范围为θ∈[10,14]∪[27,40],此时驾驶员应认真观察航道内船舶间隙,严格执行可选横渡角的可选范围。在船舶间隙为400m时,可选通用横渡角范围是θ∈[351,359]∪[27,40],该渡船角选择有23种。在船舶间隙为500m时,渡船的通用横渡角为θ∈[351,359]∪[27,40],该渡船角选择有48种,所以在船舶间隙为500m时,渡船尽量在此情况下横渡。在船舶间隙为600m时,渡船的通用横渡角为θ∈[10,40]。此时渡船可选的渡船方案种类有30种。通过以上分析,渡船在穿越上游下行船舶时,应选则尽量在船舶间隙为500m时进行横渡,此时渡船的会遇风险较低,可选择的横渡角范围大。
[0093]
附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
