1.本发明涉及一种仿生跳跃机器人,具体设计一种仿生共收缩式动态支点跳跃机器人及其跳跃方法。
背景技术:
2.随着人类社会发展与进步,跳跃机器人领域在近几十年中得到极大发展。而生物界中许多如蝗虫等跳跃昆虫有着优越的陆地跳跃能力,目前仿生跳跃机器人没有体现出仿生机器人的优势所在。
3.目前许多仿生跳跃机器人仿生程度不高,导致结构复杂,质量较重,使用弹簧作为储能装置,储能能力有限,且驱动元件的利用性单一,跳跃性能并未能达到理想状态。而许多直翅目跳跃昆虫,例如蝗虫,通过使用跳跃足伸肌与屈肌两个动力源对储能部位进行同步储能的方式强化跳跃能力。基于该背景,研发一种结构简单,储能能力强,驱动元件利用程度高的仿生跳跃机器人可有效改善跳跃效果。
技术实现要素:
4.为了克服上述现有技术的不足,本发明提供了一种仿生共收缩式动态支点跳跃机器人及其跳跃方法。
5.一种仿生共收缩式动态支点跳跃机器人,包括动力装置、支撑机构和弹跳机构;动力装置由上箱体、第一电机、第二电机、中隔板、第一绞盘、第二绞盘下箱体组成;支撑机构由圆柱销、上支撑杆、中位圆柱销和下支撑杆组成;弹跳机构由股节杆、方形销、储能装置、伸肌绳索、屈肌绳索、胫节杆、脚垫和末位圆柱销组成;上箱体下方安装中隔板,上箱体内部安装有第一电机与第二电机,第一电机与第二电机固定于中隔板上方,第一电机输出轴通过中隔板a孔与第一绞盘安装,第二电机输出轴通过中隔板b孔与第二绞盘安装,中隔板下方安装下箱体,圆柱销通过g孔与e孔或f孔将动力装置与支撑机构连接在一起,上支撑杆通过中位圆柱销与下支撑杆固定,圆柱销与中位圆柱销均采用过盈配合方式装配,股节杆通过j孔与c孔或d孔将动力装置与弹跳机构连接在一起,股节杆通过方形销与储能装置固定,储能装置另一侧通过胫节杆a柱铰接,a柱采用间隙配合,末位圆柱销通过k孔固定胫节杆末端与脚垫,伸肌绳索的一端连接胫节杆h孔,另一端穿入股节杆内部,通过j孔与第一绞盘连接,屈肌绳索的一端连接胫节杆i孔,另一端穿入股节杆内部,通过j孔与第二绞盘连接,储能装置的材料为碳纤维,伸肌绳索与屈肌绳索的材料为为无弹力麻绳,支撑机构用于稳定动力装置。
6.一种仿生共收缩式动态支点跳跃机器人的跳跃方法:
7.在同一起跳周期中,分为三个动力传输阶段:
8.第一阶段:第二电机首先开始工作,通过输出轴的旋转将屈肌绳索部分缠绕于第二绞盘上,屈肌绳索带动胫节杆旋转,跳跃机构完成屈曲;
9.第二阶段:第一电机开始工作,通过输出轴的旋转将伸肌肌绳索部分缠绕于第一
绞盘上,第二电机继续工作,通过输出轴的旋转将屈肌绳索部分缠绕于第二绞盘上,在伸肌绳索与屈肌绳索的共同拉伸作用下,储能装置开始弯曲储能;
10.第三阶段:第一电机继续工作,通过输出轴的旋转将伸肌肌绳索部分缠绕于第一绞盘上,第二电机停止工作,释放缠绕于第二绞盘上的伸肌绳索,导致伸肌绳索拉伸力持续,屈肌绳索拉伸力消失,储能装置得以伸展释放,胫节杆绕a点迅速旋转,旋转方向与第一阶段相反。
11.本发明的有益效果是:
12.1、本发明利用两个电机,在跳跃不同阶段发挥着不同作用:第一电机在第二阶段中,产生的动能转换为储能装置的弹性势能,起到储能作用。第一电机在第三阶段中,通过伸肌绳索拉动胫节杆旋转,起到了加速胫节杆旋转的作用。第二电机在第一阶段中,拉动胫节杆旋转,完成跳跃机构弯曲的作用。第二电机在第二阶段中,产生的动能转换为储能装置的弹性势能,起到了储能作用。
13.2、该机器人在跳跃第二阶段,两个电机所产生的扭矩均储存在储能装置中,扩大了机构的储存能力;储能装置材料为碳纤维,所占空间小,可储存的弹性势能大;
14.3、本发明该机器人在第三阶段中,以a为支点,h为施力点的杠杆与以h为支点,a为施力点的费力杠杆效果叠加,强化了机构释能速度,提高了跳跃输出功率。
附图说明
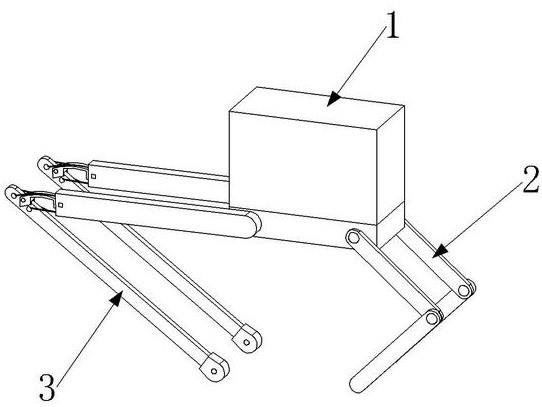
15.图1为本发明的立体图;
16.图2为本发明的动力装置的爆炸立体图;
17.图3为本发明的支撑机构的立体图;
18.图4为本发明的跳跃机构的立体图;
19.图5为本发明的胫节杆的立体图;
20.图6为本发明的正视图。
具体实施方式
21.如图1、图2、图3、图4、图5和图6所示,一种仿生共收缩式动态支点跳跃机器人,包括动力装置1、支撑机构2和弹跳机构3;动力装置1由上箱体11、第一电机12、第二电机13、中隔板14、第一绞盘15、第二绞盘16下箱体17组成;上箱体11下方安装中隔板14,上箱体11内部安装有第一电机12与第二电机13,第一电机12与第二电机13固定于中隔板14上方,第一电机12输出轴通过中隔板14的a孔与第一绞盘15安装,第二电机13输出轴通过中隔板14的b孔与第二绞盘16安装,中隔板14下方安装下箱体17;
22.支撑机构2由圆柱销21、上支撑杆22、中位圆柱销23和下支撑杆24组成,圆柱销21通过g孔与e孔或f孔将动力装置1与支撑机构2连接在一起,上支撑杆22通过中位圆柱销23与下支撑杆24固定,圆柱销21与中位圆柱销23均采用过盈配合方式装配,上支撑杆和下支撑杆之间的角度不定,装配过程中需要根据具体情况进行调整,达到稳定动力装置的作用,弹跳机构3由股节杆31、方形销32、储能装置33、伸肌绳索34、屈肌绳索35、胫节杆36、脚垫37和末位圆柱销38组成,股节杆31通过j孔与c孔或d孔将动力装置1与弹跳机构3连接在一起,股节杆31通过方形销32与储能装置33固定,储能装置33另一侧通过胫节杆36的a柱铰接,a
柱采用间隙配合,末位圆柱销38通过k孔固定胫节杆36末端与脚垫37,伸肌绳索34的一端连接胫节杆36的h孔,另一端穿入股节杆31内部,通过j孔与第一绞盘15连接,屈肌绳索35的一端连接胫节杆36的i孔,另一端穿入股节杆31内部,通过j孔与第二绞盘16连接。
23.储能装置33的材料为碳纤维增强树脂基复合材料,伸肌绳索34与屈肌绳索35的材料为为无弹力麻绳。
24.一种仿生共收缩式动态支点跳跃机器人的跳跃方法:
25.在同一起跳周期中,分为三个动力传输阶段:
26.第一阶段:第一电机12不工作,第二电机13工作,第二电机13通过第二绞盘16缠绕部分屈肌绳索35,实现弹跳机构3屈曲,屈曲角度与支撑机构2相关,须保证动力装置1稳定;
27.第二阶段:第一电机12与第二电机13同步工作,通过第一绞盘15和第二绞盘16分别缠绕伸肌绳索34与屈肌绳索35,使储能装置33产生弹性势能;
28.第三阶段:第一电机12工作,通过第一绞盘15继续缠绕伸肌绳索34,第二电机13停止工作,第一绞盘15释放缠绕的屈肌绳索35。
技术特征:
1.一种仿生共收缩式动态支点跳跃机器人,其特征在于:包括动力装置(1)、支撑机构(2)和弹跳机构(3);动力装置(1)通过c孔与d孔与两个弹跳机构(3)j孔固定,动力装置(1)通过e孔与f孔与两个支撑机构(3)g孔通过圆柱销(21)固定。2.根据权利要求1所述的一种仿生共收缩式动态支点跳跃机器人,其特征在于:所述的动力装置(1)由上箱体(11)、第一电机(12)、第二电机(13)、中隔板(14)、第一绞盘(15)、第二绞盘(16)下箱体(17)组成;上箱体(11)下方安装中隔板(14),上箱体(11)内部安装有第一电机(12)与第二电机(13),第一电机(12)与第二电机(13)固定于中隔板(14)上方,第一电机(12)输出轴通过中隔板(14)的a孔与第一绞盘(15)安装,第二电机(13)输出轴通过中隔板(14)的b孔与第二绞盘(16)安装,中隔板(14)下方安装下箱体(17)。3.根据权利要求1所述的一种仿生共收缩式动态支点跳跃机器人,其特征在于:所述的支撑机构(2)由圆柱销(21)、上支撑杆(22)、中位圆柱销(23)和下支撑杆(24)组成,圆柱销(21)通过g孔与e孔或f孔将动力装置(1)与支撑机构(2)连接在一起,上支撑杆(22)通过中位圆柱销(23)与下支撑杆(24)固定,圆柱销(21)与中位圆柱销(23)均采用过盈配合方式装配。4.根据权利要求1所述的一种仿生共收缩式动态支点跳跃机器人,其特征在于:所述的弹跳机构(3)由股节杆(31)、方形销(32)、储能装置(33)、伸肌绳索(34)、屈肌绳索(35)、胫节杆(36)、脚垫(37)和末位圆柱销(38)组成,股节杆(31)通过j孔与c孔或d孔将动力装置(1)与弹跳机构(3)连接在一起,股节杆(31)通过方形销(32)与储能装置(33)固定,储能装置(33)另一侧通过胫节杆(36)a柱铰接,a柱采用间隙配合,末位圆柱销(38)通过k孔固定胫节杆(36)末端与脚垫(37),伸肌绳索(34)的一端连接胫节杆(36)h孔,另一端穿入股节杆(31)内部,通过j孔与第一绞盘(15)连接,屈肌绳索(35)的一端连接胫节杆(36)i孔,另一端穿入股节杆(31)内部,通过j孔与第二绞盘(16)连接。5.根据权利要求1所述的一种仿生共收缩式动态支点跳跃机器人,其特征在于:所述的储能装置(33)的材料为碳纤维增强树脂基复合材料;所述的伸肌绳索(34)与屈肌绳索(35)的材料为无弹力麻绳。6.权利要求1所述一种仿生共收缩式动态支点跳跃机器人的跳跃方法,其特征在于:在同一起跳周期中,分为三个动力传输阶段:第一阶段:第一电机(12)不工作,第二电机(13)工作,第二电机(13)通过第二绞盘(16)缠绕部分屈肌绳索(35),实现弹跳机构(3)屈曲;第二阶段:第一电机(12)与第二电机(13)同步工作,通过第一绞盘(15)和第二绞盘(16)分别缠绕伸肌绳索(34)与屈肌绳索(35),使储能装置(33)产生弹性势能;第三阶段:第一电机(12)工作,通过第一绞盘(15)继续缠绕伸肌绳索(34),第二电机(13)停止工作,第一绞盘(15)释放缠绕的屈肌绳索(35)。
技术总结
一种仿生共收缩式动态支点跳跃机器人及其跳跃方法,跳跃机器人包括动力装置、支撑机构和弹跳机构;动力装置通过C孔与D孔与两个弹跳机构J孔固定,动力装置通过E孔与F孔与两个支撑机构G孔通过圆柱销固定。本发明结构简单,储能能力强,驱动元件利用程度高的仿生跳跃机器人可有效改善跳跃效果。器人可有效改善跳跃效果。器人可有效改善跳跃效果。
技术研发人员:佟金 高子博 曹成全 李默 吴宝广 马云海 孙霁宇 宋伟 高鹏 李金光 许子和
受保护的技术使用者:吉林大学
技术研发日:2022.01.27
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。