1.本发明涉及垃圾箱容量检测技术领域,尤其涉及一种垃圾机器人垃圾箱容量检测方法及其系统。
背景技术:
2.垃圾机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在地面上完成地板清理工作。垃圾机器人减轻了人力成本,提高效率。随着近几年科技的发展,垃圾机器人在城市环境的治理作业中正逐步代替清洁工人,进行简单而繁重的工作。现有垃圾机器人垃圾箱上设置一个传感器,用于检测垃圾箱的垃圾容量。垃圾箱中的垃圾种类较多,分布不均,一个传感器在检测自身与垃圾表面的高度时,局限性较大,检测到的高度数据误差较大,影响最后垃圾容量的标定。
技术实现要素:
3.为此,需要提供一种垃圾机器人垃圾箱容量检测方法及其系统,解决一个传感器在检测自身与垃圾表面的高度时,检测到的高度数据误差较大,影响最后垃圾容量的标定的问题。
4.为实现上述目的,本实施例提供了一种垃圾机器人垃圾箱容量测量方法,包括如下步骤:
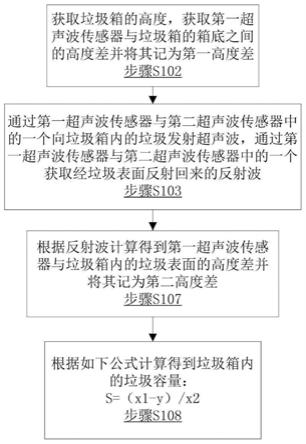
5.获取垃圾箱的高度,获取第一超声波传感器与垃圾箱的箱底之间的高度差并将其记为第一高度差,所述第一超声波传感器与垃圾箱的箱底之间的高度相同于第二超声波传感器与垃圾箱的箱底之间的高度;
6.通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,通过第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波;
7.根据所述反射波计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差;
8.根据如下公式计算得到垃圾箱内的垃圾容量:
9.s=(x1-y)/x2
10.公式中,s为垃圾容量,x1为第一高度差,x2为垃圾箱的高度,y为第二高度差。
11.进一步地,在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”时,还包括如下步骤:
12.通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射不同强度的超声波。
13.进一步地,所述不同强度的超声波包括在第一区间、第二区间与第三区间上具有第一强度与第二强度组合生成的超声波,所述第一强度小于第二强度。
14.进一步地,还包括如下步骤:
15.首先通过高速adc采样模块对第一超声波传感器与第二超声波传感器中的一个获取的反射波进行采样;
16.其次通过傅里叶变换从高速adc采样模块采样的反射波中提取幅度频谱;
17.之后根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。
18.进一步地,在步骤“通过傅里叶变换从高速adc采样模块采样的反射波中提取幅度频谱”后,还包括如下步骤:
19.提取所述幅度频谱中幅度大于阈值检波线的曲线;
20.在步骤“根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差”时,还包括如下步骤:
21.根据幅度大于阈值检波线的曲线来计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。
22.进一步地,第一超声波传感器的探测范围在30
°
以下;或者:
23.第二超声波传感器的探测范围在30
°
以下。
24.进一步地,还包括如下步骤:
25.重复进行上述步骤,得到多个的垃圾容量,计算多个的垃圾容量的平均值,将所述平均值作为垃圾容量。
26.进一步地,在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”前,还包括如下步骤:
27.通过振动机构对垃圾箱进行振动。
28.进一步地,还包括如下步骤:
29.判断垃圾机器人是否处于清扫模式,若是则通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,通过第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波。
30.为实现上述目的,本实施例还提供一种垃圾机器人垃圾箱容量检测系统,包括置于垃圾机器人内部的垃圾箱、第一超声波传感器、第二超声波传感器与处理单元;
31.第一超声波传感器与第二超声波传感器均位于所述垃圾箱的箱底上方,所述处理单元与所述超声波传感器相连接,所述处理单元用于执行上述任意一项实施例所述的一种垃圾机器人垃圾箱容量检测方法。
32.区别于现有技术,上述技术方案中,第一超声波与第二超声波具有多种的探测方法;其一为,第一超声波传感器可以发射超声波,第二超声波传感器接收第一超声波传感器发射的超声波;其二为,第二超声波传感器可以发射超声波,第一超声波传感器接收第一超声波传感器发射的超声波;其三为,第一超声波传感器可以发射超声波,然后再接收自身发射的超声波;其四为,第二超声波传感器可以发射超声波,然后再接收自身发射的超声波。如此,第一超声波与第二超声波可以对多个探测点进行探测,以获得多个的第二高度差的数据,提升垃圾容量的真实性,减小系统误差带来的影响。另外,第一超声波传感器与第二超声波传感器可以对多类的物体(诸如垃圾袋、树叶、食物、书籍等)进行检测,检测效果较佳。
附图说明
33.图1为本实施例中容量测量方法的流程图之一;
34.图2为本实施例中容量测量方法的流程图之二;
35.图3为本实施例中傅里叶函数的示意图;
36.图4为本实施例中第一超声波传感器与第二超声波传感器探测第二高度差的结构示意图;
37.图5为本实施例中幅度频谱图与阈值检波线的结构示意图之一;
38.图6为本实施例中幅度频谱图与阈值检波线的结构示意图之二;
39.图7为本实施例中不同强度的超声波的示意图;
40.图8为本实施例中在第一区间、第二区间、第三区间上依次为第一强度、0强度、第二强度的超声波的示意图;
41.图9为本实施例中在第一区间、第二区间、第三区间上依次为第二强度、第一强度、第一强度的超声波的示意图;
42.图10为本实施例中在第一区间、第二区间、第三区间上依次为第二强度、0强度、第一强度的超声波的示意图。
43.附图标记说明:
44.1、第一超声波传感器;
45.2、第二超声波传感器;
46.3、垃圾箱。
具体实施方式
47.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
48.请参阅图1至图10,本实施例提供一种垃圾机器人垃圾箱容量测量方法,包括如下步骤:
49.步骤s102,获取垃圾箱的高度,获取第一超声波传感器1与垃圾箱3的箱底之间的高度差并将其记为第一高度差,所述第一超声波传感器1与垃圾箱3的箱底之间的高度相同于第二超声波传感器2与垃圾箱3的箱底之间的高度。一般来说,是将超声波传感器(第一超声波传感器1、第二超声波传感器2)放置在垃圾箱的箱底3的上方,垃圾箱3的箱底是平放于垃圾机器人的内部。超声波传感器为利用人耳听不到的超声波(20000hz以上)来作为探测源进行探测的装置。超声波传感器的发射器向某一方向发射超声波,超声波传感器的计时器在发射时刻的同时开始计时,超声波在空气中传播,途中碰到垃圾箱的垃圾表面就立即返回来,超声波传感器的接收器收到反射波就立即停止计时。根据计时器记录的时间,就可以计算出发射点距障碍物的距离。
50.步骤s103,处理模块第一超声波传感器1与第二超声波传感器2中的一个向垃圾箱内的垃圾发射超声波,处理模块第一超声波传感器1与第二超声波传感器2中的一个获取经垃圾表面反射回来的反射波。
51.步骤s107,根据所述反射波提取计算得到第一超声波传感器1与垃圾箱3内的垃圾表面的高度差并将其记为第二高度差;
52.步骤s108,根据如下公式计算得到垃圾箱内的垃圾容量:
53.s=(x1-y)/x2
54.公式中,s为垃圾容量,x1为第一高度差,x2为垃圾箱的高度,y为第二高度差,其中垃圾箱的高度为垃圾箱的箱底与垃圾箱的顶部敞口之间的距离,也表示着垃圾刚好均匀地堆满垃圾箱所占据的高度。
55.请参阅图4,第一超声波传感器1与第二超声波传感器2二者均位于垃圾箱3的上方,第一高度差记为x1,第二高度差记为y,垃圾箱的高度记为x2。假设x1=50厘米,x2=40厘米,y=30厘米,则垃圾容量=(50-30)/40=0.5,则表示垃圾占垃圾箱总容量的一半。
56.上述技术方案中,第一超声波与第二超声波具有多种的探测方法;其一为,第一超声波传感器可以发射超声波,第二超声波传感器接收第一超声波传感器发射的超声波;其二为,第二超声波传感器可以发射超声波,第一超声波传感器接收第一超声波传感器发射的超声波;其三为,第一超声波传感器可以发射超声波,然后再接收自身发射的超声波;其四为,第二超声波传感器可以发射超声波,然后再接收自身发射的超声波。如此,第一超声波与第二超声波可以对多个探测点进行探测,以获得多个的第二高度差的数据,提升垃圾容量的真实性,减小系统误差带来的影响。另外,第一超声波传感器与第二超声波传感器可以对多类的物体(诸如垃圾袋、树叶、食物、书籍等)进行检测,检测效果较佳。
57.在本实施例中,所述第一超声波传感器与垃圾箱的箱底之间的高度相同于第二超声波传感器与垃圾箱的箱底之间的高度,使得第二高度差是便于计算的。因为此时所述第一超声波传感器与所述第二超声波传感器是位于同一平面上,且这个平面是平行于垃圾箱的箱底所在的平面。第一超声波传感器、第二超声波传感器与探测点之间形成一个等腰三角形,根据预先获取到第一超声波传感器与第二超声波传感器之间的距离(三角形的底边边长)、第一超声波传感器与探测点的距离(三角形的腰长)即可计算得到第二高度差。需要说明的是,第一超声波传感器与第二超声波传感器的探测角度要覆盖整个垃圾桶,使得两个超声波传感器可以对多个位置进行检测。
58.在本实施例中,现有的超声波传感器在检测垃圾时是循环发出数个相同的脉冲,在回波识别时不易识别出自身的特征点,换句话说,数个相同的脉冲自身不具突出的特征点。在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”时,容量测量方法还包括如下步骤:步骤s103,处理模块第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射不同强度的超声波,如图2所示。另外,在步骤“根据所述反射波计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差”时,还包括如下步骤:在反射波中提取出目标波形,目标波形与发射的超声波的波形类似,然后根据提取的目标波形计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。如此,第一超声波传感器或者第二超声波传感器发送这种脉冲作为特殊编码,之后可以做到自体识别回波,提升抗干扰的能力,避免垃圾机器人在运动过程中吸尘电机、行走电机、刷子等部件的声音都会产生干扰。
59.请参阅图7,在本实施例中,所述不同强度的超声波包括在第一区间(1st)、第二区间(2nd)与第三区间(3nd)上具有第一强度(以1表示)与第二强度(以2表示)组合生成的超
声波,所述第一强度小于第二强度。第一强度代表发射10v(伏特)强度的超声波,第二强度代表发射20v(伏特)强度的超声波,0强度表示不发射超声波;第一强度代表发射5v(伏特)强度的超声波,第二强度代表发射10v(伏特)强度的超声波,0强度表示不发射超声波。
60.在本实施例中,在3个序列脉冲中可以有27种组合,其中以零电流电平开始的组合将被丢弃,在剩余的18个编码中,包含所有三个的相同值的两个符号也是相同的丢弃的。其余16个编码都以非零电流电平开始,并且至少有一个转换,如图7所示。这些特征点保证任何响应数据包在数据包的开头有一个转换,并且每个响应数据包中至少有一个转换象征每个3序列进行对4位信息编码。
61.具体的,第一超声波传感器可以发送在第一区间(如图8的1st)、第二区间(如图8的2nd)、第三区间(如图8的3nd)上依次为第一强度、0强度、第二强度的超声波,如图8所示;或者,第一超声波传感器可以发送在第一区间(如图9的1st)、第二区间(如图9的2nd)、第三区间(如图9的3nd)上依次为第二强度、第一强度、第一强度的超声波,如图9所示;或者,第一超声波传感器可以发送在第一区间(如图10的1st)、第二区间(如图10的2nd)、第三区间(如图10的3nd)上依次为第二强度、0强度、第一强度的超声波
……
62.在本实施例中,容量测量方法还包括如下步骤:步骤104,首先处理模块高速adc(analog-to-digital converter,模拟-数字转换器)采样模块对第一超声波传感器与第二超声波传感器中的一个获取的反射波进行采样,如图2所示。高速adc采样模块在处理过程通常不会引起额外的噪声和信号失真。需要说明的是,超声波传感器获取的反射波的信号可以通过接收放大电路送入到高速adc采样模块中。
63.步骤105,其次处理模块傅里叶变换从高速adc采样模块采样的反射波中提取幅度频谱,如图2所示。采样完成后进行傅立叶变换提取指定的信号的频谱。傅里叶变换表示能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合,傅里叶函数的函数如图3所示。幅度频谱指各个分量的幅度随着频率的变化。步骤107,之后根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。
64.需要说明的是,当没有提取幅度频谱中幅度大于阈值检波线的曲线时,直接对幅度频谱进行计算即可。
65.通过傅里叶变换从反射波中提取幅度频谱,可以排除外界声音、垃圾机器人在移动过程中产生的震动、部件的共振等干扰,准确地获取反射波中所需要频率的信息,之后对反射波里的信息进行简单、快速、高效、准确分析,可以获得准确性较佳的垃圾容量。
66.在某些实施例中,可以通过二极管倍压检波、电压比较器检波的方式来对超声波传感器获取的反射波进行采样,但是效果均不如高速adc采样模块的好。二极管倍压检波缺点在于检波输入电压要求比较高,锗二极管也要0.2-0.3v(伏特)才能工作,而且也无法消除直流信号的干扰。采用电压比较器检波缺点在于,虽然检波输入电压可以设的比较低,但对直流信号干扰无也是无法滤除的。
67.在本实施例中,在步骤“通过傅里叶变换从超声波传感器获取的反射波中提取幅度频谱”后,容量测量方法还包括如下步骤:步骤106,提取所述幅度频谱中幅度大于阈值检波线的曲线,如图2所示。以及,在步骤“根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差”时,还包括如下步骤:步骤107,根据幅
度大于阈值检波线的曲线来计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差,如图2所示。
68.请参阅图4、图5与图6,不同距离段的回波信号的幅度可以配置一个触发值,阈值检波线可以根据需求而设定,处理模块阈值检波线可以切割到想要的超声波发射的角度,超声波发射的角度是发射波与竖直面之间的夹角。图5中的阈值检波线对应的幅值大于图6中的阈值检波线对应的幅值。优选的,第一超声波传感器的探测范围在30
°
以下;或者:第二超声波传感器的探测范围在30
°
以下。阈值检波线对应的幅度越大,提取到幅度大于阈值检波线的曲线所对应的超声波发射的角度是越小的,超声波发射的角度越小,超声波所作用的探测点的面积越小;超声波发射的角度越大,超声波所作用的探测点的面积越大。超声波发射的角度在幅度频谱中对应的是θ,如图4、图5与图6所示。如此,检测方法可以灵活地调节超声波发射角度的功能,可以适用于不同形状的垃圾桶,因为垃圾机器人内的垃圾桶的高度较低,宽度也较小,需要精度更大的检测方法。
69.需要说明的是,处理模块通过傅里叶变换从反射波中提取幅度频谱后,会从幅度频谱中提取出目标波形,目标波形与发射的超声波的波形类似。例如发射波的强度为图10所示的第一强度、0强度、第二强度,那么从目标波形的形状与第一强度、0强度、第二强度波形的形状类似。然后再在目标波形中提取幅度大于阈值检波线的曲线。
70.在本实施例中,容量测量方法还包括如下步骤:步骤s109,重复进行上述步骤,得到多个的垃圾容量,计算多个的垃圾容量的平均值,将所述平均值作为垃圾容量,如图2所示。第一超声波传感器发送超声波,第一传感器或者第二传感器中的一个接受反射波后,通过垃圾容量=(第一高度差-第二高度差)/垃圾箱的高度的公式计算出一个垃圾容量的数值,因为一个垃圾容量是仅有一个检测点,处理模块多次的计算获得多个的垃圾容量,表示第一超声波传感器已对垃圾箱内不同位置的监测点进行测量,最后对得到多个的垃圾容量求平均,获得最后的垃圾容量。
71.在本实施例中,在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”前,容量测量方法还包括如下步骤:处理模块振动机构对垃圾箱进行振动。需要说明的是,当振动机构在运行时垃圾机器人处于振尘模式。因为垃圾机器人通过负压机构将垃圾吸到垃圾箱中时,垃圾机器人垃圾箱内装填的是种类不一的垃圾,垃圾的分布不均匀,导致一边垃圾多,另一边垃圾少。处理模块振动机构对垃圾箱进行周期性的振动,让垃圾的表面趋于平整,如此所测量的第二高度差的差异较小。
72.在本实施例中,容量测量方法还包括如下步骤:步骤s101,判断垃圾机器人是否处于清扫模式,如图2所示;若是则进入步骤s102,处理模块第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,处理模块第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波;若否则进入步骤s1021,不检测垃圾容量。清扫模式指垃圾机器人采用刷扫与负压机构的方式,将地面杂物吸纳进入自身的垃圾箱,从而完成地面清理的一种模式。在垃圾机器人处于清扫模式时,垃圾机器人吸附垃圾进入垃圾箱,超声波雷达可以向垃圾箱内的垃圾发射超声波以检测自身与垃圾的距离,以计算垃圾的实时容量;在垃圾机器人处于振尘模式情况下,可以不用计算垃圾的实时容量。如此,通过合理地安排超声波雷达的运作时间,可以降低垃圾机器人的能耗,延长其单次使用的寿命。
73.在本实施例中,处理单元通过通信模块(诸如can通信模块、rs485通信模块、wi-fi模块等)接收垃圾机器人的总线状态,进而获取垃圾机器人的运行状态。垃圾机器人的运行状态包括清扫模式、振尘模式、充电模式等。处理单元为具有数据处理功能的电子元件,包括但不限于:微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、图形处理器(graphics processing unit,gpu)、数字信号处理器(digital signal process,dsp)。
74.处理单元与超声波传感器(第一超声波传感器、第二超声波传感器)相连接,处理单元控制超声波传感器(第一超声波传感器、第二超声波传感器)运作。处理单元与高速adc采样模块相连接,处理单元控制高速adc采样模块进行采样。处理单元分别与通信模块相连接,用于获取垃圾机器人的运行状态,在此不赘述。
75.尤其的,容量测量方法可以对低速形式的垃圾机器人的垃圾箱进行容量检测。
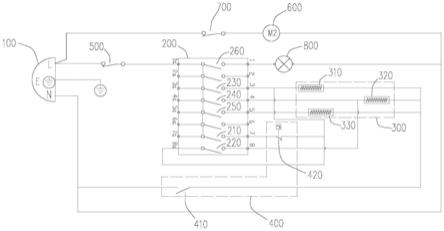
76.本实施例还提供一种垃圾机器人垃圾箱容量检测系统,包括置于垃圾机器人内部的垃圾箱、第一超声波传感器、第二超声波传感器与处理单元。第一超声波传感器与第二超声波传感器均位于所述垃圾箱的箱底上方,所述处理单元与所述超声波传感器相连接,所述处理单元用于执行上述任意一项实施例所述的一种垃圾机器人垃圾箱容量检测方法。
77.在本实施例中,处理单元通过通信模块(诸如can通信模块、rs485通信模块、wi-fi模块等)接收垃圾机器人的总线状态,进而获取垃圾机器人的运行状态。垃圾机器人的运行状态包括清扫模式、振尘模式、充电模式等。处理单元为具有数据处理功能的电子元件,包括但不限于:微控制单元(microcontroller unit,mcu)、中央处理器(central processing unit,cpu)、图形处理器(graphics processing unit,gpu)、数字信号处理器(digital signal process,dsp)。
78.在本实施例中,处理单元开启通过升压泵电路进行偏压选择,给超声波传感器按编码脉冲设置好的参数,即可发射超声波信号。
79.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
80.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在限制本技术。
81.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
82.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
83.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过
程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
84.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
85.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
86.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。