技术特征:
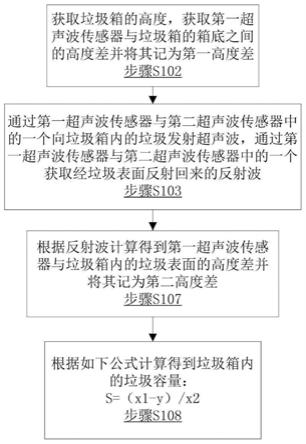
1.一种垃圾机器人垃圾箱容量测量方法,其特征在于,包括如下步骤:获取垃圾箱的高度,获取第一超声波传感器与垃圾箱的箱底之间的高度差并将其记为第一高度差,所述第一超声波传感器与垃圾箱的箱底之间的高度相同于第二超声波传感器与垃圾箱的箱底之间的高度;通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,通过第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波;根据所述反射波计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差;根据如下公式计算得到垃圾箱内的垃圾容量:s=(x1-y)/x2公式中,s为垃圾容量,x1为第一高度差,x2为垃圾箱的高度,y为第二高度差。2.根据权利要求1所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”时,还包括如下步骤:通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射不同强度的超声波。3.根据权利要求2所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,所述不同强度的超声波包括在第一区间、第二区间与第三区间上具有第一强度与第二强度组合生成的超声波,所述第一强度小于第二强度。4.根据权利要求1至3任意一项所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,还包括如下步骤:首先通过高速adc采样模块对第一超声波传感器与第二超声波传感器中的一个获取的反射波进行采样;其次通过傅里叶变换从高速adc采样模块采样的反射波中提取幅度频谱;之后根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。5.根据权利要求4所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,在步骤“通过傅里叶变换从高速adc采样模块采样的反射波中提取幅度频谱”后,还包括如下步骤:提取所述幅度频谱中幅度大于阈值检波线的曲线;在步骤“根据所述幅度频谱计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差”时,还包括如下步骤:根据幅度大于阈值检波线的曲线来计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差。6.据权利要求5所述的垃圾机器人垃圾箱容量测量方法,其特征在于,还包括如下步骤:第一超声波传感器的探测范围在30
°
以下;或者:第二超声波传感器的探测范围在30
°
以下。7.据权利要求1所述的垃圾机器人垃圾箱容量测量方法,其特征在于,还包括如下步骤:
重复进行上述步骤,得到多个的垃圾容量,计算多个的垃圾容量的平均值,将所述平均值作为垃圾容量。8.根据权利要求1所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,在步骤“通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波”前,还包括如下步骤:通过振动机构对垃圾箱进行振动。9.根据权利要求1所述的一种垃圾机器人垃圾箱容量测量方法,其特征在于,还包括如下步骤:判断垃圾机器人是否处于清扫模式,若是则通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,通过第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波。10.一种垃圾机器人垃圾箱容量检测系统,其特征在于,包括置于垃圾机器人内部的垃圾箱、第一超声波传感器、第二超声波传感器与处理单元;第一超声波传感器与第二超声波传感器均位于所述垃圾箱的箱底上方,所述处理单元与所述超声波传感器相连接,所述处理单元用于执行权利要求1至9任意一项所述的一种垃圾机器人垃圾箱容量检测方法。
技术总结
本发明公布一种垃圾机器人垃圾箱容量测量方法及其系统,测量方法包括如下步骤:获取垃圾箱的高度,获取第一超声波传感器与垃圾箱的箱底之间的高度差并将其记为第一高度差;通过第一超声波传感器与第二超声波传感器中的一个向垃圾箱内的垃圾发射超声波,通过第一超声波传感器与第二超声波传感器中的一个获取经垃圾表面反射回来的反射波;根据所述反射波计算得到第一超声波传感器与垃圾箱内的垃圾表面的高度差并将其记为第二高度差;根据如下公式计算得到垃圾箱内的垃圾容量:垃圾容量=(第一高度差-第二高度差)/垃圾箱的高度。上述技术方案的第一超声波传感器与第二超声波传感器可以对多类的物体进行检测,检测效果较佳。佳。佳。
技术研发人员:魏青松 傅建辉 曹祥生 陈文强
受保护的技术使用者:福建汉特云智能科技有限公司
技术研发日:2021.12.31
技术公布日:2022/4/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。