基于消息传递的水声ofdm通信系统接收信号处理方法
技术领域
1.本发明属于水声通信技术领域,尤其涉及一种基于消息传递的水声ofdm通信系统接收信号处理方法。
背景技术:
2.正交频分复用(orthogonal frequency division multiplexing,ofdm)是一种十分有吸引力的技术并广泛应用于水声通信(underwater acoustic communications,uac),它可以抗多径衰落并实现高数据速率传输。但是,对多普勒频移较敏感。因此,水声ofdm接收机设计的一项主要任务是处理严重的多普勒效应和信道变化。目前两步多普勒消除方法被验证在典型信道场景下有效。此外,脉冲噪声(impulsive noise,in)是另一种衰减接收机性能的因素。传统的脉冲噪声消除方法是非线性和无记忆的方法,例如限幅、截取、组合限幅截取算法,对大幅度信号具有破坏性,尤其是在ofdm系统中。同时传统的脉冲干扰消除方法未考虑载波频率偏移的影响,在水声ofdm通信中,传统方法不能工作,需要设计新的适合水声通信的脉冲噪声消除方法。由于水声通信为了远距离传输,发送信号的载波频率较低,因此可用带宽有限,已有的接收机采用分步的信道估计和符号检测方法,需发送较多的导频来保证符号检测性能,降低了频谱利用率。为了提高频谱效率,需要减少发送的导频数,并提高接收端信号处理算法,保证接收机的可靠性。
技术实现要素:
3.本发明目的是提出一种水声ofdm通信有脉冲干扰消除的低复杂度接收机设计方法,针对脉冲噪声干扰下的水声ofdm通信,由于水声信道具有较大的时延扩展和多普勒扩展,接收信号存在严重的码间干扰和子载波间干扰,同时单个大幅度的时域脉冲干扰也会影响频域所有子载波测量,传统基于逐子载波的信号解调性能会严重衰减,为了提高系统的鲁棒性,一方面接收端在信号解调前需要进行脉冲干扰消除,另一方面载波频率偏移补偿与信道均衡可以抗多径与多普勒影响。为了达到上述目的,本发明的技术方案是提供一种基于消息传递有脉冲噪声消除的水声ofdm通信接收信号处理方法,将时域脉冲噪声建模为稀疏向量,通过空载波测量,联合估计信道与脉冲噪声。在载波频移补偿和脉冲噪声干扰消除后,基于因子图设计,设计近似消息传递算法,实现联合信道估计、符号检测及信道译码。
4.水声ofdm通信系统发送端信号处理包括:
5.1、将发送的源比特数据经过信道编码,然后把信道编码后的数据进行符号映射,星座映射符号经过串并转换(s/p),进行ofdm调制;其中信道编码可以采用卷积码或ldpc编码。星座映射方式采用一般的正交相移键控调制(qpsk)或正交振幅调制(qam);
6.2、将ofdm符号通过并串转换(p/s)和加保护间隔,经过数模转换后上变频到载波频率fc,最后通过换能器将信号发送出去。为了远距离传输,发送信号频率在十~几十千赫兹。
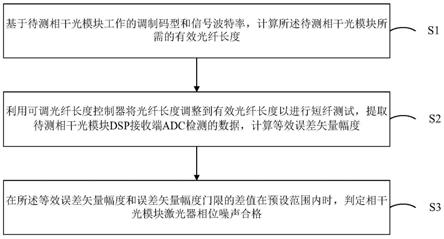
7.本发明主要是在对接收信号的处理方法,如图1所示,具体包括:
8.1、水声信道具有大的时延和多普勒扩展,发送信号经过水声信道后,接收端首先进行重采样、下变频和低通滤波处理,消除宽带多普勒影响;
9.2、将残余多普勒影响建模为窄带多普勒频率偏移,利用空载波测量值联合估计多普勒频移和脉冲噪声,然后进行多普勒频移补偿和脉冲噪声干扰消除。由于脉冲噪声具有稀疏性,在联合估计过程中,充分利用脉冲噪声的稀疏性提高估计性能;
10.3、接收端执行联合信道估计、符号检测及信道译码。重复上述步骤,直到接收机算法收敛。基于因子图设计,设计近似消息传递算法。基于因子图的联合估计,该方法可以扩展到高维的数据处理中,且接收机具有低复杂度。其次,利用近似消息传递算法,可以获得近似最优的估计性能。
11.本发明的有益效果为,本发明适合高维的数据处理,具有低复杂度,同时联合信道估计、符号检测及信道译码减少导频负载,能提高频谱利用率。
附图说明
12.图1为有脉冲干扰消除的ofdm接收机信号处理流程示意图。
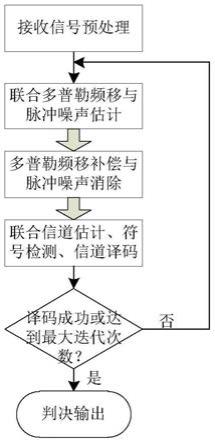
13.图2为联合信道估计、符号检测及信道译码的因子图设计示意图。
具体实施方式
14.下面结合附图,对本发明的具体实施方式作进一步详细描述。
15.本发明主要解决水声ofdm通信中的脉冲干扰消除与低复杂度近似最优估计的问题。
16.首先,简要介绍水声ofdm通信系统。定义t表示ofdm符号的周期,tg表示循环前缀的长度。ofdm符号块总的周期长度为t
bl
=t tg。那么子载波的间隔是
△
f=1/t,k个子载波的频域点位置为
17.fk=fc k
△
f,k=-k/2,
…
,k/2-1(1)
18.其中fc是中心频率。信号宽带是b=k/t。定义sa和sn分别是非重叠的有用子载波和空载波的集合,它们满足sa∪sn=-k/2,
…
,k/2-1。将k个子载波的集合分解为导频子载波集s
p
,数据子载波集sd,sa=s
p
∪sd。若d[k]表示在第k个子载波上的数据符号,发送的带通ofdm信号表示为
[0019][0020]
其中g(t)是加循环前缀操作,表示成
[0021][0022]
在ofdm符号之间插入循环前缀,能减轻符号间干扰(isi)。
[0023]
水声通信信道是双选信道,具有较大的时延和多普勒扩展,其模型可以参数化表示为
[0024][0025]
其中p是多条路径的总数,a
p
(t)和τ
p
(t)分别表示第p条路径幅度和路径延迟。通常我们假设信道幅值在一个ofdm符号周期内是不变的,且时延变化可以通过一阶多项式近似表示,也就是
[0026]ap
(t)≈a
p
,τ
p
(t)≈τ
p-at(4)
[0027]
发送信号经过水声信道后,脉冲噪声干扰下的接收信号表示为
[0028][0029]
其中和分别表示高斯噪声和外部脉冲噪声。
[0030]
接收端信号处理步骤如下:
[0031]
(1)重采样、下变频及低通滤波处理:通过重采样方法对接收信号中的大尺度多普勒进行补偿,重采样因子的估计是通过在发送信号之前和之后分别插入前导码和后导码,其中和分别为前导码和后导码的长度。通过重采样操作,多普勒补偿后的信号为该信号经过下变频和低通滤波后,得到基带信号
[0032][0033]
其中ε表示残余载波频率偏移,w(t)和i(t)分别表示高斯白噪声和外部脉冲噪声。对连续时间信号y(t)以速率1/b进行采样,获得离散时间信号样本y[n]=y(t)|
t=n/b
。由于信道的频率响应为
[0034][0035]
第l个信道抽头系数定义为
[0036][0037]
对于离散时间信道,接收信号样本可以表示为
[0038][0039]
定义如下向量表示:
[0040]
y=(y[0],y[1],
…
,y[k-1])
t
[0041]
i=(i[0],i[1],
…
,i[k-1])
t
[0042]
w=(w[0],w[1],
…
,w[k-1])
t
[0043]
h=(h[0],h[1],
…
,h[l-1])
t
[0044]
λ(ε)=diag(1,e
j2πε
,
…
,e
j2πε(k l-1)/b
)
[0045]
将去循环前缀后的接收信号离散时间样本表示为矩阵-向量的形式为:
[0046]
y=λ(ε)hfhd i w(10)
[0047]
其中,h为托普利兹矩阵,第一列元素表示为:
[0048]
h=[h[0],h[1],
…
,h[l-1]]
t
(11)
[0049]
(2)联合脉冲噪声与频率偏移估计:
[0050]
基于空载波测量联合估计脉冲噪声与频率偏移:
[0051]znull
=θfλh(ε)(y-pe)(12)
[0052]
其中,对接收信号y进行脉冲噪声消除与多普勒偏移补偿,经过傅里叶变换处理后的输出信号为z=fλh(ε)(y-pe),其中p为k
×
ni位置矩阵,每列有一个元素值为1,其它全部为0,e是ni×
1非零的脉冲噪声值,f为k
×
k傅里叶变换矩阵。θ为k1×
k的选择矩阵,每行有一个元素值为1,其它全部为0,k1是空载波的个数;通过最小化空载波z
null
上的能量值估计频率偏移与脉冲噪声,输出估计值然后补偿载波频移与消除脉冲噪声,输出信号
[0053][0054]
其中包括多普勒估计误差,脉冲噪声估计误差,以及外部高斯噪声。
[0055]
(3)联合信道估计、符号检测及信道译码
[0056]
接收信号对脉冲噪声消除和载波频移补偿后,进行联合的信道估计、符号检测和信道译码。写出信道和信号的联合概率分布,基于联合概率分布设计因子图,然后根据设计的因子图,计算因子图上所传递的消息。通过因子图上校验节点与变量节点的不断迭代,最终算法收敛,输出信号估计值,具体为:
[0057]
接收信号做傅里叶变换,输出为:
[0058][0059]
信号d,信道h,以及信号的联合概率分布为
[0060][0061]
根据联合概率分布设计因子图,其中校验节点为p(h
l
),p(dk),变量节点为h
l
与dk;每个校验节点与之相关的变量节点连接,由于未知变量h通过傅里叶变换阵f线性混合后乘以diag(d),然后通过噪声线性测量观察,从校验节点传递到变量节点h
l
的消息为:
[0062][0063]
从变量节点h
l
传递到校验节点的消息为
[0064][0065]
从校验节点传递到变量节点dk的消息为:
[0066][0067]
通过因子图上校验节点与变量节点迭代多次后,最终算法收敛,输出信号估计值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。