1.本发明涉及光通信设备技术领域,具体涉及一种相干光模块激光器相位噪声检测方法及装置。
背景技术:
2.随着移动互联网、物联网、云计算及大数据等业务的驱动,作为各种业务承载架构的光传输网络需要适应这种新的技术需求。
3.基于相干检测与高速数字信号处理(dsp)相结合的相干光学系统,凭借其电色散补偿、非线性补偿和实现载波同步的卓越优点,超100gbp/s相干光通信不仅在运营商传输网络大量使用,在新兴的dci数据中心互联(data center inter-connect)也呈现相干下沉的需求。则相应的,对超100g相干光模块内部所需使用的光器件要求更高,则要求光器件的传输速率更高、电带宽更高、线性度更好、封装尺寸更小及功耗更低。尤其是可调光源即窄线宽集成可调谐激光器,波长易如调谐、谱线宽度窄、相位噪声小及维护简单等特点。
4.窄线宽集成可调谐激光器(简称激光器),作为相干光模块的重要组成部分,是实现超大容量超高速率超长传输距离的关键器件,其波长调谐速度、波长调谐范围和光波线宽是激光器性能的重要指标。但由于各个激光器厂家所使用的设计技术、调试及制造工艺的不同,导致出厂的激光器相位噪声均不相同。目前100g或超100g相干光模块内部的设计中,由于成本及布局空间等因素的限制,其发端的信号光(即tx sig)和接收端的本振光(即rx lo)是由同一只激光器通过分光器分光提供的,载波相位的相位噪声phase noise,会导致接收端解调的载波相位恢复异常。而且超100g相干光模块在高波特高阶qam应用时,相比100g相干光模块,对激光器的线宽及相位噪声要求更高。激光器相位噪声异常时,在常规的背靠背或短纤测试中(如短纤小于1米)中无法有效检测出来,但经过传输系统线路后,会出现业务异常或与对端光模块光纤对接不通,导致问题排查困难。常规的相位噪声检测方法,通过检测低频信号并进行放大、滤波处理,需额外增加硬件电路,使用范围受限,不适合相干光模块的多种码型灵活应用需求。
技术实现要素:
5.针对现有技术中存在的缺陷,本发明第一方面提供一种相干光模块激光器相位噪声检测方法。根据超100g相干光模块需适应多中工作模式灵活切换的应用场景,当相干光模块工作在不同的调制码型(例如:qpsk、8qam、16qam及64qam)、不同的信号波特率(32gbaud、45gbaud及64gbaud)时,对激光器的线宽和相位噪声的要求是不同的。通过本方法,无需额外增加硬件电路设计,可快速筛选出相位噪声不符合应用要求的激光器,从而提高相干光模块在生产调试中的测试效率与故障拦截率,能很好的适应智慧光网的灵活运用。
6.为达到以上目的,本发明采取的技术方案是:
7.一种相干光模块激光器相位噪声检测方法,该方法包括以下步骤:
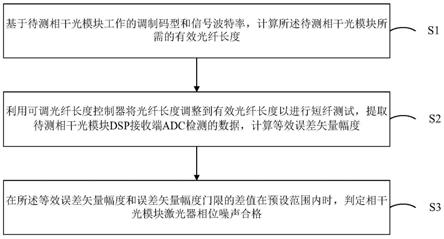
8.基于待测相干光模块工作的调制码型和信号波特率,计算所述待测相干光模块所需的有效光纤长度;
9.利用可调光纤长度控制器将光纤长度调整到有效光纤长度以进行短纤测试,提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度;
10.在所述等效误差矢量幅度和误差矢量幅度门限的差值在预设范围内时,判定相干光模块激光器相位噪声合格。
11.一些实施例中,基于待测相干光模块工作的调制码型和信号波特率,计算所述待测相干光模块所需的有效光纤长度,包括:
12.根据待测相干光模块工作的调制码型和信号波特率,计算用于评价相位噪声的误差矢量幅度门限;
13.根据所述误差矢量幅度门限,计算所述待测相干光模块所需的有效光纤长度。
14.一些实施例中,根据待测相干光模块工作的调制码型和信号波特率,计算用于评价相位噪声的误差矢量幅度门限,包括:
15.根据待测相干光模块工作的调制码型和信号波特率,确定对应的期望osnr指标及osnr代价penalty;
16.根据公式:计算误差矢量幅度门限,其中,penalty为osnr代价,osnr
ref_inband
为期望osnr指标,evm
eepn
为误差矢量幅度门限。
17.一些实施例中,根据所述误差矢量幅度门限,计算所述待测相干光模块所需的有效光纤长度,包括:
18.根据公式:计算有效光纤长度,其中,evm
eepn
为误差矢量幅度门限,β2为光纤的gvd参数,baudrate为工作的信号波特率,lw为激光器线宽。
19.一些实施例中,提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度,包括:
20.提取待测相干光模块dsp接收端adc检测的数据,计算实际误差矢量幅度;
21.根据理论信噪比snr与实际snr的差值,对实际误差矢量幅度进行修正得到等效误差矢量幅度。
22.一些实施例中,提取待测相干光模块dsp接收端adc检测的数据,计算实际误差矢量幅度,包括:
23.提取待测相干光模块dsp接收端adc检测的数据;
24.将提取的数据转换为x和y两个复平面上以幅度和相位定义的四个向量,以绘制星座图;
25.根据所述星座图计算实际误差矢量幅度。
26.一些实施例中,根据理论信噪比snr与实际snr的差值,对实际误差矢量幅度进行修正得到等效误差矢量幅度,包括:
27.根据待测相干光模块包括的光电器件,并利用信噪比snr替代光信噪比osnr以建立信号噪声模型;
28.基于信号噪声模型进行仿真,获取snr与误码率ber的关系曲线:snr
ideal
曲线;
29.读取待测相干光模块dsp接收端上报的snr值,测试并绘制待测相干光模块在正常工作情况下的snr
real
曲线;
30.拟合比较得到snr
gap
=snr
real-snr
ideal
,基于snr
gap
的数值选择对实际误差矢量幅度数值进行修正的k因子;
31.根据所述k因子对实际误差矢量幅度进行修正得到等效误差矢量幅度。
32.一些实施例中,利用可调光纤长度控制器将光纤长度调整到有效光纤长度以进行短纤测试,包括:
33.利用可调光纤控制器将光纤长度调整到所需的有效光纤长度;
34.将待测相干光模块的发送端光信号接入可调光纤控制器的输入端口,并将可调光纤控制器的输出端口的光信号,输送至待测相干模块的接收端。
35.本发明第二方面提供一种相干光模块激光器相位噪声检测装置。其无需额外增加硬件电路设计,可快速筛选出相位噪声不符合应用要求的激光器,从而提高相干光模块在生产调试中的测试效率与故障拦截率,能很好的适应智慧光网的灵活运用。
36.一种相干光模块激光器相位噪声检测装置,包括:
37.计算模块,其基于待测相干光模块工作的调制码型和信号波特率,计算所述待测相干光模块所需的有效光纤长度;
38.调节模块,其用于接收所述计算模块发送的所需的有效光纤长度信息,以下发调节指令;
39.测试模块,其用于在所述有效光纤长度下进行短纤测试,并提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度;
40.判断模块,其用于在所述等效误差矢量幅度和误差矢量幅度门限的差值在预设范围内时,判定相干光模块激光器相位噪声合格。
41.一些实施例中,所述计算模块用于:
42.根据待测相干光模块工作的调制码型和信号波特率,计算用于评价相位噪声的误差矢量幅度门限;
43.根据所述误差矢量幅度门限,计算所述待测相干光模块所需的有效光纤长度。
44.与现有技术相比,本发明的优点在于:
45.本发明中的相干光模块激光器相位噪声检测方法,其无需借助仪表以及其他测试系统,也不需要额外增加硬件设计或修改硬件电路,只需增加一个可调光纤长度控制器,将待测相干光模块的收发端口进行光口自环测试,方法灵活、可适应性强,可用于研发调试,也可用于批量生产测试可快速有效筛选光源相位噪声异常的的模块,以提高相干光模块在生产调试中的故障拦截率与测试效率,适应智慧光网的灵活运用。
附图说明
46.图1为本发明实施例中实现相干光模块激光器相位噪声检测方法的框图;
47.图2为本发明实施例中相干光模块激光器相位噪声检测方法的流程图;
48.图3为本发明实施例中相干光模块激光器相位噪声检测方法的步骤s2的流程图;
49.图4为本发明实施例中工作在200g 16qam模式下,提取dsp adc数据进行星座图恢复绘制过程示意图;
50.图5为本发明实施例中复平面下evm的示意图;
51.图6为本发明实施例中提供的一种相干光模块激光器相位噪声检测装置的示意性框图。
具体实施方式
52.相干光模块所使用的窄线宽集成可调谐激光器,激光器的波长调谐主要基于布拉格反射光栅,通过改变温度、注入电流等方法,改变光栅的有效折射率,从而改变光栅的布拉格波长。目前技术比较成熟的波长可调谐激光器主要有基于布拉格反射器半导体激光器、分布式反馈半导体激光器及外腔式半导体激光器,不同的激光器供货厂家由于研发设计、调试及制造工艺的不同,其出厂的激光的相位噪声均不相同。而相干光模块内发端的信号光tx sig和收端的本振rx lo共用同样一只激光器光源,载波相位的相位噪声会导致收端解调的载波相位恢复异常。同时超100g模块在高波特高阶qam应用时,相比100g dp-qpsk相干模块,对激光器的线宽及相位噪声要求更高。激光器相位噪声异常时,在常规的b2b或短纤测试中(如短纤小于1米)中无法有效检测出来。
53.但经过传输系统线路后,会出现业务异常或与对端光模块光纤对接不通,导致问题排查困难。常规的相位噪声检测方法,通过检测低频信号并进行放大、滤波处理,需额外增加硬件电路,使用范围受限,不适合相干光模块的多种码型灵活应用需求。
54.针对上述问题,参见图1所示,本发明提供了一种相干光模块激光器相位噪声检测方法。在超100g相干光模块应用中,由于工作在不同的调制码型(qpsk、8qam、16qam、64qam)、信号波特率(32gbaud、45gbaud、64gbaud),对激光器的线宽和相位噪声要求均不相同。通过本发明,无需额外增加硬件设计或修改硬件电路,只需增加一个可调光纤长度控制器,将待测相干光模块的收发端口进行光口自环测试,方法灵活、可适应性强,可快速有效筛选光源相位噪声异常的模块,以提高相干光模块在生产调试中的故障拦截率与测试效率,适应智慧光网的灵活运用。
55.以下结合附图及实施例对本发明作进一步详细说明。
56.参见图2所示,本发明实施例提供一种相干光模块激光器相位噪声检测方法,该方法包括以下步骤:
57.s1.基于待测相干光模块工作的调制码型和信号波特率,计算所述待测相干光模块所需的有效光纤长度。
58.具体而言,步骤s1包括:
59.根据待测相干光模块工作的调制码型和信号波特率,计算用于评价相位噪声的误差矢量幅度门限。
60.根据所述误差矢量幅度门限,计算所述待测相干光模块所需的有效光纤长度。
61.可以理解的是,相干光模块可以工作在不同的调制码型(qpsk、8qam、16qam、64qam)、以及不同的信号波特率(32gbaud、45gbaud、64gbaud)下,而在不同的调制码型和信号波特率下,其所能达到的期望osnr指标及osnr代价penalty也是不一样的。
62.为计算误差矢量幅度门限,首先,根据待测相干光模块工作的调制码型和信号波特率,确定对应的期望osnr指标及osnr代价penalty。
63.然后,根据公式:计算误差矢量幅
度门限,其中,penalty为osnr代价,osnr
ref_inband
为期望osnr指标,evm
eepn
为误差矢量幅度门限(eepn:equalization enhanced phase noise)。
64.具体而言,在第一个例子中,若相干光模块工作在100g qpsk调制码型时,期望osnr指标11db,penalty为2db时,根据上述公式,则有:
65.2=-10log
10
(1-11*evm
eepn2
),可换算出evm
eepn
≈18.3%,即后续检测出来的误差矢量幅度大于18.3%可判为不合格。
66.再比如,在第二个例子中,若相干光模块工作在100g qpsk调制码型时,期望osnr指标13db,penalty为2db时,则
67.2=-10log
10
(1-13*evm
eepn2
),可换算出evm
eepn
≈16.8%,即后续检测出来的误差矢量幅度大于16.8%可判为不合格。
68.值得说明的是,同样的qpsk调制码型,但所要求的osnr指标不同,第一个例子相较第二个例子能容忍的相位噪声要更强一些。
69.在本实施例中,当确定了误差矢量幅度门限后,便可根据公式:计算有效光纤长度,其中,evm
eepn
为误差矢量幅度门限,β2为光纤的gvd参数,baudrate为工作的信号波特率,lw为激光器线宽。
70.在上面第一个例子的基础上,若baudrate=32gbaud,激光器线宽=300khz,evm
eepn
为18%,而β2为所用光纤已知的gvd参数,则可计算出此时所需有效光纤长度l大约为17km左右,值得说明的是,由于各个已知参量的单位不同换算复杂,同时实际使用的光纤质量等,均影响光纤长度,本发明不做更多赘述。
71.s2.利用可调光纤长度控制器将光纤长度调整到有效光纤长度以进行短纤测试,提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度。
72.首先,利用可调光纤控制器将光纤长度调整到所需的有效光纤长度。
73.将待测相干光模块的发送端光信号接入可调光纤控制器的输入端口,并将可调光纤控制器的输出端口的光信号,输送至待测相干模块的接收端。
74.可以理解的是,为了避免短纤测试中无法有效检测出来,本实施例中先对光纤长度进行了计算,其得到的有效光纤长度(即根据dsp的工作模式所能容忍的相噪容限来反推需要的测试光纤长度),随后采用可调光纤控制器进行调节,这样可以根据不同的调制码型和信号波特率,调整不同的有效光纤长度,适用性更强。
75.做完上述准备工作后,便可以进行短纤测试,参见图3所示,提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度,具体包括:
76.s21.提取待测相干光模块dsp接收端adc检测的数据,计算实际误差矢量幅度;
77.具体的,步骤s21包括:
78.s211.提取待测相干光模块dsp接收端adc检测的数据。
79.s212.将提取的数据转换为x和y两个复平面上以幅度和相位定义的四个向量,以绘制星座图。
80.其中,每两个向量组合代表了某一偏振下的符号码元的复数矢量。
81.s213.根据所述星座图计算实际误差矢量幅度。
82.参见图4所示,其为本发明实施例工作在200g、16qam模式下,提取dsp adc数据进行星座图恢复绘制过程,该过程均由dsp完成,本技术在此不做描述。
83.为便于说明,参见图5所示,误差矢量(error vector)连接测量矢量(被测信号)和判决矢量(参考信号)。evm(error vetor magnitude)是这个矢量的幅度。判决需要最小化的误差矢量(error vector)。error vector=0意味着测量一个理想信号。evm是衡量调相干制信号的一种标志,它表示了接收机对信号进行解调时所产生的i-q分量与理想分量的接近程度。evm的好坏关系到信号的质量,evm越小,信号的质量越高;evm越大说明信号受干扰越大。evm与误码率成正比,但是它比眼图或ber测试的速度更快,并且能够提供更多可供观察判断的信息。evm和信噪比(snr)以及信号与噪声加失真比(sndr)也有直接的关系。故本实施例中可以通过evm判断通信系统不同层次引入的实际误差。
84.s22.根据理论信噪比snr与实际snr的差值,对实际误差矢量幅度进行修正得到等效误差矢量幅度。
85.在获取了实际误差矢量幅度后,为了得到更精确的数据,还对计算出来的实际误差矢量幅度进行了修正处理,步骤s22具体包括以下步骤:
86.s221.根据待测相干光模块包括的光电器件,并利用信噪比snr替代光信噪比osnr以建立信号噪声模型;
87.值得说明的是,在进行相干光模块理论模型建立时,由于各个dsp芯片的算法设计均不相同,无法用单一模型描述,故均按照理想模型进行建模。相干光模块的模拟前端包括高速dac、driver、tia、adc,模拟前端的基本架构类似,可使用单一模型描述。需考虑模拟前端的噪声,相关技术指标可从供货厂商获取。仿真模型中忽略了调制器和pd引入的噪声。在进行总体信号噪声模型时,主要用snr来替代osnr。
88.实际建模中,假设光信号功率等效于
→
电信号功率,光噪声功率等效于
→
电噪声功率。osnr只考虑了0.1nm参考带宽内的噪声,则snr与osnr关系式为:
[0089][0090][0091]
其中,
[0092]
osnr=optical signal to noise ratio=总信号功率/参考带宽(0.1nm)内的噪声功率,即光域信噪比。
[0093]
信号功率=每符号能量(es)*符号率;噪声功率=噪声功率密度(n0)*参考带宽。
[0094]
snr:每个采样点上的信噪比,即信号功率与噪声功率之比,电域信噪比。
[0095]
es/n0:符号信噪比,每个符号能量与噪声功率谱密度的之比。
[0096]
eb/n0:比特信噪比,指的是每bit的能量与噪声功率谱密度之比,也是ber差错性能曲线的横轴。
[0097]
公式(2)中,p代表偏振复用系数,偏振复用时p=2,否则p=1;相干光模块中,偏振复用的2个信号,eb/n0相同,比特率只有原始信号的一半;12.5ghz对应osnr测量时0.1nm的ase噪声带宽。
[0098]
基于上述内容,对于包括ase、dac、driver、tia、adc的相干光模块,其信号噪声模型可以表示为:
[0099][0100]
s222.基于信号噪声模型进行仿真,获取snr与误码率ber的关系曲线:snr
ideal
曲线;
[0101]
s223.读取待测相干光模块dsp接收端上报的snr值,测试并绘制待测相干光模块在正常工作情况下的snr
real
曲线;
[0102]
s224.拟合比较得到snr
gap
=snr
real-snr
ideal
,基于snr
gap
的数值选择对实际误差矢量幅度数值进行修正的k因子;
[0103]
s225.根据所述k因子对实际误差矢量幅度进行修正得到等效误差矢量幅度。
[0104]
具体而言,首先基于信号噪声模型进行仿真,获取snr与误码率ber的关系曲线:snr
ideal
曲线;然后读取待测相干光模块dsp接收端上报的snr值,同时测试并绘制待测相干光模块在正常工作情况下的snr
real
曲线;最后拟合比较得到snr
gap
=snr
real-snr
ideal
,基于snr
gap
的数值选择对实际误差矢量幅度数值进行修正的k因子。其中,snr=20log(n/evm),其中n为常量,n与调制码型相关。
[0105]
可以理解的是,当获得了修正的k因子后,若修正前的实际误差矢量幅度表示为evmrms,修正后的等效误差矢量幅度表示为evm,则有:evm=k*evmrms。
[0106]
例:相干光模块产品a,调制码型为100g qpsk(32gbaud)时,实测snr
real=
20.1db,仿真snr
ideal
=19.7db,snr
gap=
0.4,根据snr
ideal
计算所得的evmrms≈10.3%,由于实测值snr
real
与snr
ideal
之间的误差很小,且qpsk码型本身对相位噪声不太敏感,此时并不需要过多修正,则根据实际产品a的osnr vs.ber测试情况确定修正因子k=1.05,此时evm=k*evmrms≈10.8%。
[0107]
若相干光模块产品a工作在200g 16qam(32gbaud)时,由于16qam码型(pam4信号)对光电芯片的带宽及driver、tia的线性度thd等其它噪声更加敏感,所以虽然是工作在相同的波特率,但16qam的修正因子相对qpsk码型会有明显差异。实际k值的确定会根据产品a所用光电器件相关性能参数与dsp的适配及实际调试应用情况来决定。此时,根据实际产品a的osnr vs.ber测试曲线情况,确定修正因子k=1.41,evm=k*evmrms≈14.5%。
[0108]
s3.在所述实际误差矢量幅度和误差矢量幅度门限的差值在预设范围内时,判定相干光模块激光器相位噪声合格。
[0109]
上文已经说到,相干光模块工作在不同的应用模式时,即调制码型(qpsk/qam)、工作信号波特率不一样时,其所能达到的期望osnr指标及osnr代价penalty也是不一样的。
[0110]
为此,首先根据调制码型和波特率,获得对应的等效evm门限,大于门限的判为不合格。例如,100g dp-qpsk码型,baudrate为32gbaud,极限osnr目标为11db,penalty为2db,则可以通过公式:计算误差矢量幅度门限,然后进行判决,若实际获取的evm(例如步骤s225中获得的evm),大于误差矢量幅度门限18.3%可判为不合格,可以理解的是,步骤s225中获得的evm为10.8%,其小于18.3%,故其是合格的。
[0111]
此外,根据结合公式通过调整光纤长度l,可判别不同的调制码型、波特率,对激光器的线宽(lw=linewidth)指标(含激光相位噪声指
标)需求不同,从而达到根据应用模式不同,灵活筛选激光器相位噪声不满足要求的作用。
[0112]
综上所述,本发明中的相干光模块激光器相位噪声检测方法,其无需借助仪表以及其他测试系统,也不需要额外增加硬件设计或修改硬件电路,只需增加一个可调光纤长度控制器,将待测相干光模块的收发端口进行光口自环测试,方法灵活、可适应性强,可用于研发调试,也可用于批量生产测试可快速有效筛选光源相位噪声异常的的模块,以提高相干光模块在生产调试中的故障拦截率与测试效率,适应智慧光网的灵活运用。
[0113]
参见图6所示,本发明实施例提供一种相干光模块激光器相位噪声检测装置,其包括计算模块、调节模块、测试模块和判断模块。
[0114]
其中,计算模块基于待测相干光模块工作的调制码型和信号波特率,计算所述待测相干光模块所需的有效光纤长度。调节模块用于接收所述计算模块发送的所需的有效光纤长度信息,以下发调节指令。测试模块用于在所述有效光纤长度下进行短纤测试,并提取待测相干光模块dsp接收端adc检测的数据,计算等效误差矢量幅度。判断模块用于在所述等效误差矢量幅度和误差矢量幅度门限的差值在预设范围内时,判定相干光模块激光器相位噪声合格。
[0115]
一些实施例中,所述计算模块用于:
[0116]
根据待测相干光模块工作的调制码型和信号波特率,计算用于评价相位噪声的误差矢量幅度门限;根据所述误差矢量幅度门限,计算所述待测相干光模块所需的有效光纤长度。
[0117]
具体而言,所述计算模块根据待测相干光模块工作的调制码型和信号波特率,确定对应的期望osnr指标及osnr代价penalty;
[0118]
根据公式:计算误差矢量幅度门限,其中,penalty为osnr代价,osnr
ref_inband
为期望osnr指标,evm
eepn
为误差矢量幅度门限。
[0119]
并根据公式:计算有效光纤长度,其中,evm
eepn
为误差矢量幅度门限,β2为光纤的gvd参数,baudrate为工作的信号波特率,lw为激光器线宽。
[0120]
一些实施例中,所述测试模块用于:
[0121]
提取待测相干光模块dsp接收端adc检测的数据,计算实际误差矢量幅度;根据理论信噪比snr与实际snr的差值,对实际误差矢量幅度进行修正得到等效误差矢量幅度。
[0122]
具体而言,所述测试模块用于:
[0123]
提取待测相干光模块dsp接收端adc检测的数据;将提取的数据转换为x和y两个复平面上以幅度和相位定义的四个向量,以绘制星座图;根据所述星座图计算实际误差矢量幅度。
[0124]
并用于:
[0125]
根据待测相干光模块包括的光电器件,并利用信噪比snr替代光信噪比osnr以建立信号噪声模型;基于信号噪声模型进行仿真,获取snr与误码率ber的关系曲线:snr
ideal
曲线;读取待测相干光模块dsp接收端上报的snr值,测试并绘制待测相干光模块在正常工作情况下的snr
real
曲线;拟合比较得到snr
gap
=snr
real-snr
ideal
,基于snr
gap
的数值选择对实际误差矢量幅度数值进行修正的k因子;根据所述k因子对实际误差矢量幅度进行修正得到等
效误差矢量幅度。
[0126]
一些实施例中,所述测试模块还用于:
[0127]
利用可调光纤控制器将光纤长度调整到所需的有效光纤长度;将待测相干光模块的发送端光信号接入可调光纤控制器的输入端口,并将可调光纤控制器的输出端口的光信号,输送至待测相干模块的接收端。
[0128]
综上所述,本发明中的相干光模块激光器相位噪声检测装置,其无需借助仪表以及其他测试系统,也不需要额外增加硬件设计或修改硬件电路,只需配合可调光纤长度控制器,将待测相干光模块的收发端口进行光口自环测试,方法灵活、可适应性强,可用于研发调试,也可用于批量生产测试可快速有效筛选光源相位噪声异常的模块,以提高相干光模块在生产调试中的故障拦截率与测试效率,适应智慧光网的灵活运用。
[0129]
本发明不局限于上述实施方式,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围之内。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
