1.本技术实施例涉及医疗器件技术领域,特别涉及一种瓣膜假体的输送装置以及瓣膜假体系统。
背景技术:
2.二尖瓣关闭不全的主要病理生理改变是二尖瓣反流,即,当左心室收缩时,血流由左心室注入主动脉和阻力较小的左心房,流入左心房的反流量可达左心室排血量的50%以上,使得左心室舒张期负荷加重。
3.二尖瓣反流是最常见的老年心脏瓣膜假体病,随着人口老年化,发病率急剧上升,目前用于治疗二尖瓣反流的方法主要分为外科开胸手术以及二尖瓣置换术,其中,由于外科开胸手术对人体创伤较大,导致75岁以上高龄患者中有50%的患者因顾虑外科开胸手术的风险而拒绝采用外科开胸手术治疗。因此,对人体创伤较小的二尖瓣置换术的应用越来越广泛。
4.现有用于实施二尖瓣置换术的瓣膜假体的输送装置多采用丝控或线控的方式来控制瓣膜假体,以达到精准定位与可控释放的目的。然而,发明人发现:当使用现有的瓣膜假体的输送装置实施二尖瓣置换术时,在撤线或撤丝以释放瓣膜假体的过程中,常出现线或丝无法解开从而导致瓣膜假体无法从输送装置中解脱,进而提升手术的风险。
5.因此,亟需提供一种瓣膜假体的输送装置以及瓣膜假体系统,以确保在使用瓣膜假体的输送装置进行手术时,能够顺利释放瓣膜假体,从而降低手术时的风险。
技术实现要素:
6.本技术实施例的目的在于提供一种瓣膜假体的输送装置以及瓣膜假体系统,可确保在使用瓣膜假体的输送装置进行手术时,能够顺利释放瓣膜假体,从而降低手术时的风险。
7.为解决上述问题,本技术实施例提供一种瓣膜假体的输送装置,包括:鞘管组件、内管组件和夹持组件;所述鞘管组件可移动的套设于所述内管组件,用于束缚处于压缩状态的瓣膜假体;所述内管组件用于装载处于压缩状态的瓣膜假体;所述夹持组件包括至少两个夹子和控制件;所述夹子具有第一工作状态和第二工作状态,在第一工作状态时,所述夹子被配置形成闭口端以束缚所述瓣膜假体的结合端,在第二工作状态时,所述夹子被配置形成开口端以与所述瓣膜假体分离;所述控制件用于在所述鞘管组件释放瓣膜假体后与所述夹子相对运动,以使所述夹子从第一工作状态变为第二工作状态。
8.此外,本技术实施例还提供一种瓣膜假体系统,包括:瓣膜假体以及上述的输送装置,所述瓣膜假体包括结合端,所述结合端设有卡槽,所述卡槽用于与所述输送装置的夹子可拆卸连接。
9.本技术实施例提供的瓣膜假体的输送装置以及瓣膜假体系统,包括:鞘管组件、内管组件和夹持组件;所述鞘管组件可移动的套设于内管组件,用于束缚处于压缩状态的瓣
膜假体;所述内管组件用于装载处于压缩状态的瓣膜假体;所述夹持组件包括至少两个夹子和控制件;所述夹子具有第一工作状态和第二工作状态,在第一工作状态时,所述夹子被配置形成闭口端以束缚所述瓣膜假体的结合端,在第二工作状态时,所述夹子被配置形成开口端以与所述瓣膜假体分离;所述控制件用于与所述夹子相对运动,以使所述夹子从第一工作状态变为第二工作状态。如此,在输送装置在鞘管组件释放瓣膜假体后,仅需将控制件与夹子相对运动,以使得夹子从第一工作状态转变为第二工作状态,并使得原本束缚在夹子上的瓣膜假体与夹子分离,从而无需采用线控或丝控的方式来控制瓣膜假体,以避免在撤线或撤丝释放瓣膜假体的过程中,由于线或丝无法解开导致瓣膜假体无法从输送装置中解脱,进而确保在使用瓣膜假体的输送装置进行手术时,能够顺利释放瓣膜假体,降低手术时的风险。
10.另外,所述夹子包括主体部以及弹性部,当所述夹子处于第一工作状态时,所述弹性部在所述控制件的作用下至少部分发生形变形成所述闭口端;当所述夹子处于第二工作状态时,所述弹性部的闭口端在自然状态下恢复为开口端。
11.另外,所述控制件包括控制通道,所述控制通道的尺寸被配置为使所述主体部通过,而所述弹性部无法通过;当所述夹子处于第一工作状态时,所述弹性部与所述控制通道相抵接,并在所述控制通道的作用下形成所述闭口端;当所述夹子处于第二工作状态时,所述弹性部与所述控制通道保持径向空隙。
12.另外,在所述夹子处于第一工作状态时,所述弹性部的最大直径大于所述控制通道的直径。
13.另外,所述控制件为圆柱件、圆台件;所述控制通道沿平行于所述控制件轴线的方向设置于所述控制件上。
14.另外,所述控制件还包括位于远端的套筒,所述控制通道还包括所述套筒的内腔。
15.另外,所述夹子包括两个相对设置的单片,所述单片包括主体分部以及弹性分部;在任一所述夹子中,两个所述单片的所述主体分部形成所述主体部,两个所述单片的所述弹性分部形成所述弹性部。
16.另外,在任一所述单片中,所述弹性分部包括与所述主体分部呈角度相连的第一延伸体以及与所述第一延伸体相连的第二延伸体;每一所述夹子的两个所述第一延伸体沿相互背离、且远离两个所述主体分部的方向延伸,每一所述夹子的两个所述第二延伸体沿相互靠近、且远离两个所述第一延伸体的方向延伸。
17.另外,输送装置还包括:手柄,所述手柄用于驱使所述控制件与所述夹子相对移动。
18.另外,所述夹持组件还包括控制管;所述手柄包括第一驱动组件以及壳体;所述内管组件的近端被配置为与所述壳体固定连接,所述内管组件的远端被配置为承载瓣膜假体;所述控制管套设于所述内管组件,且所述控制管的近端与所述第一驱动组件连接,所述控制管的远端与所述夹子连接,所述控制件固定于所述内管组件并远离所述控制管,且所述第一驱动组件用于驱动所述控制管移动、以使所述控制管相对于所述内管组件移动。
19.另外,所述夹持组件还包括连接管,所述连接管套设于所述控制管的远端;所述夹子周向分布于所述连接管的外部。
20.另外,所述夹持组件还包括控制管;所述手柄包括第一驱动组件以及壳体;所述内
管组件的近端被配置为与壳体固定连接,所述内管组件的远端被配置为承载瓣膜假体;所述控制管套设于所述内管组件,且所述控制管的近端与所述第一驱动组件连接,所述控制管的远端与所述控制件连接,且所述控制管远端设有行程槽,所述夹子通过所述行程槽固定于在所述内管组件,且所述第一驱动组件用于驱动所述控制管移动、以使所述控制管相对于所述内管组件移动。
21.另外,所述第一驱动组件包括:螺杆以及螺母,所述螺杆位于所述壳体内,且被配置禁止轴向转动,所述螺杆与所述控制管的近端固定,所述螺母套设在所述螺杆上并与所述螺杆螺纹连接;所述壳体设有开口,所述螺母的至少部分经由所述开口露出壳体。
22.另外,所述第一驱动组件还包括第一导向件和第二导向件,所述第一导向件设置在所述壳体上,第二导向件设置在所述螺杆上,所述第一导向件的延伸方向与所述螺杆的轴向方向同向,所述第二导向件沿所述第一导向件的延伸方向可滑动地设置在所述第一导向件上,以阻止所述螺杆轴向转动。
23.另外,所述第一导向件为设置在所述壳体上的轨道;所述第二导向件为设置在所述螺杆上、并与所述第一导向件嵌合的凹槽。
24.另外,所述第一驱动组件包括:齿条以及齿轮,所述齿条位于所述壳体内,且被配置只能沿其延伸方向移动,所述齿条与所述控制管的近端固定,所述齿轮与所述齿条啮合;所述壳体设有开口,所述齿轮的至少部分经由所述开口露出壳体。
附图说明
25.图1为本技术实施例一提供的输送装置的夹持组件与内管组件配合时的示意图;
26.图2为本技术实施例一提供的输送装置的夹持组件中夹子与套设于控制管上的连接管配合时的示意图;
27.图3为本技术实施例一提供的输送装置的控制件与中钢管配合时的示意图;
28.图4为本技术实施例一提供的输送装置的单片的结构示意图;
29.图5为本技术实施例一提供的输送装置的鞘管组件与第二驱动组件配合时的示意图;
30.图6为本技术实施例一提供的输送装置的内管组件与控制件配合时的示意图;
31.图7为本技术实施例一提供的输送装置的结构示意图;
32.图8为本技术实施例一提供的输送装置的夹持组件与第一驱动组件配合时的示意图;
33.图9为本技术实施例一提供的输送装置的手柄的结构示意图。
具体实施方式
34.由背景技术可知,现有用于实施二尖瓣置换术的瓣膜假体的输送装置多采用丝控或线控的方式来控制瓣膜假体,以达到精准定位与可控释放的目的。
35.经本技术发明人分析发现,当使用现有的瓣膜假体的输送装置实施二尖瓣置换术时,在撤线或撤丝以释放瓣膜假体的过程中,常出现线或丝无法解开从而导致瓣膜假体无法从输送装置中解脱,进而提升手术的风险。
36.为解决上述问题,本技术实施例一提供的瓣膜假体的输送装置,包括:鞘管组件、
内管组件和夹持组件;所述鞘管组件可移动的套设于内管组件,用于束缚处于压缩状态的瓣膜假体;所述内管组件用于装载处于压缩状态的瓣膜假体;所述夹持组件包括至少两个夹子和控制件;所述夹子具有第一工作状态和第二工作状态,在第一工作状态时,所述夹子被配置形成闭口端以束缚所述瓣膜假体的结合端,在第二工作状态时,所述夹子被配置形成开口端以与所述瓣膜假体分离;所述控制件用于与所述夹子相对运动,以使所述夹子从第一工作状态变为第二工作状态。如此,在输送装置在鞘管组件释放瓣膜假体后,仅需将控制件与夹子相对运动,以使得夹子从第一工作状态转变为第二工作状态,并使得原本束缚在夹子上的瓣膜假体与夹子分离,从而无需采用线控或丝控的方式来控制瓣膜假体,以避免在撤线或撤丝释放瓣膜假体的过程中,由于线或丝无法解开导致瓣膜假体无法从输送装置中解脱,进而确保在使用瓣膜假体的输送装置进行手术时,能够顺利释放瓣膜假体,降低手术时的风险。
37.本技术中对瓣膜假体的具体应用场景没有特别的限制,例如为用于主动脉瓣、二尖瓣、三尖瓣或肺动脉瓣的瓣膜假体。瓣膜假体包括压缩状态和释放状态,压缩状态时瓣膜假体的径向尺寸小于释放状态时瓣膜假体的径向尺寸。在需要将瓣膜假体输送到人体目标位置时,需将瓣膜假体设置为压缩状态,瓣膜假体输送到人体目标位置后,需将瓣膜假体通过球囊或者自膨胀等方式从压缩状态转变为释放状态。
38.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合附图对本技术的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本技术各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。
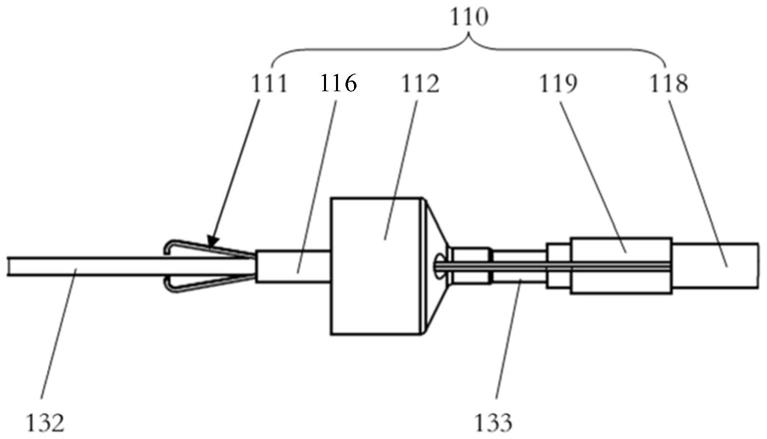
39.参见图1至图3,本技术实施例提供一种瓣膜假体的输送装置,包括:夹持组件110;夹持组件110包括至少两个夹子111和控制件112;夹子111具有第一工作状态和第二工作状态,在第一工作状态时,夹子111被配置形成闭口端以束缚瓣膜假体的结合端,在第二工作状态时,夹子111被配置形成开口端以与瓣膜假体分离;控制件112用于与夹子111相对运动,以使夹子111从第一工作状态变为第二工作状态。
40.具体的,在本实施例中,夹子111在第一工作状态时,夹子111被控制件112作用,形成闭口端,从而使得夹子111可被配置束缚瓣膜假体的结合端;夹子111在第二工作状态时,控制件112远离夹子111,夹子111不再受到控制件112的作用力,形成开口端,从而使得夹子111可与原本被束缚在夹子111上的瓣膜假体分离。
41.更具体的,在本实施例中,当输送装置在释放瓣膜假体时,控制件112保持固定而夹子111移动,从而使得控制件112与夹子111相对运动,进而使得夹子111从第一工作状态变为第二工作状态。在一替代性实施例中,当输送装置在释放瓣膜假体时,夹子保持固定而控制件移动,从而使得控制件与夹子相对运动,进而使得夹子从第一工作状态变为第二工作状态。在又一替代性实施例中,当输送装置在释放瓣膜假体时,夹子以及控制件均移动,但夹子移动的位移与控制件移动的位移不同,如此,也可使得控制件与夹子相对运动,进而使得夹子从第一工作状态变为第二工作状态。
42.优选的,继续参见图1至图3,夹子111包括主体部113以及弹性部114,当夹子111处于第一工作状态时,弹性部114在控制件112的作用下至少部分发生形变,形成上述的闭口端,以锁定瓣膜假体;当夹子111处于第二工作状态时,弹性部114的闭口端在自然状态下恢
复为开口端,以与瓣膜假体分离。在本实施例中,当夹子111处于第一工作状态时,弹性部114在控制件112的作用下部分发生形变,形成上述的闭口端,以锁定瓣膜假体。
43.具体的,夹子111从第一工作状态变为第二工作状态的过程,即是从控制件112作用夹子111的弹性部114变为控制件112不再作用夹子111的弹性部114的过程。在这过程中,每一夹子111的弹性部114从闭口端逐渐张开进而形成开口端。
44.需要说明的是,弹性部114在自然状态下即为在未受到外力作用时弹性部114所处的状态。在本实施例中,弹性部114在自然状态下形成开口端。在一替代性实施例中,也可是弹性部在自然状态下形成闭口端,此时,夹子处于第一工作状态,而当夹子在控制件的作用下形成开口端时,夹子处于第二工作状态。
45.更具体的,当夹子111处于第一工作状态时,控制件112与弹性部114相接触,并对弹性部114施加作用力,使弹性部114产生弹性形变,形成闭口端以锁定瓣膜假体;当夹子111处于第二工作状态时,控制件112不再与弹性部114接触,弹性部在撤除控制件112的作用力后,处于自然状态,形变部分恢复,闭口端恢复为开口端,瓣膜假体可从开口端分离;在控制件112与弹性部114相对远离时,夹子111从第一工作状态向第二工作状态转变。
46.优选的,控制件112包括控制通道115,控制通道115的尺寸被配置为使主体部113通过,而弹性部114无法通过;当夹子111处于第一工作状态时,夹子111的弹性部114与控制通道115相抵接,并在控制通道115的作用下形成闭口端;当夹子111处于第二工作状态时,夹子111的弹性部114与控制通道115保持径向空隙,并形成开口端。
47.如此,由于控制通道115的尺寸被配置为使主体部113通过,而弹性部114无法通过,可在控制件112与夹子111相对运动时,避免整个夹子111穿过控制通道115。并且通过控制件112与夹子111相对运动,来实现第一工作状态时,夹子111与控制通道115抵接,以形成闭口端,第二工作状态时,夹子111与控制通道115保持径向空隙,即夹子111与控制通道115不再接触,以形成开口端。
48.在本实施例中,在夹子111处于第一工作状态时,弹性部114的最大直径大于控制通道115的直径。如此,可使得控制通道115的尺寸被配置为弹性部114无法通过。在本实施例中,弹性部114的最大直径是指弹性部114的最大外接圆的直径。
49.具体的,控制件112为圆柱件、圆台件;控制通道115沿平行于控制件112轴线的方向设置于控制件112上。在本实施例中,控制件112为圆柱件。在一替代性实施例中,控制件112为圆台件。
50.进一步的,控制件112还包括位于远端的套筒116,控制通道115还包括套筒116的内腔。如此,可提高夹子111的通过性。
51.进一步参见图2与图4,在本实施例中,夹子111包括两个相对设置的单片117,每一单片117均包括主体分部101以及弹性分部102。在任一夹子111中,所有单片117的主体分部101形成了主体部113,所有单片117的弹性分部102形成了弹性部114。更具体的,组成主体部113的主体分部101相互固定。
52.具体的,在本实施例中,在任一单片117中,弹性分部102包括与主体分部101呈角度相连的第一延伸体103以及与第一延伸体103相连的第二延伸体104;每一夹子111的两个第一延伸体103沿相互背离、且远离两个主体分部101的方向延伸,每一夹子111的两个第二延伸体104沿相互靠近、且远离两个第一延伸体103的方向延伸。
53.更具体的,在本实施例中,当夹子111处于第一工作状态时,夹子111的两个第二延伸体104远离主体部113的一端相互抵接,形成闭口端以锁定瓣膜假体,当夹子111处于第二工作状态时,夹子111的两个第二延伸体104远离主体部113的一端相互分离,形成开口端,以实现夹子与瓣膜假体分离。
54.此外,参见图5至图7,输送装置还包括:鞘管组件120和内管组件130,鞘管组件120可移动的套设于内管组件130,用于束缚处于压缩状态的瓣膜假体;内管组件130用于装载处于压缩状态的瓣膜假体。
55.优选的,内管组件130包括导向头131、内芯132和中钢管133,导向头131位于内管组件130的远端,内芯132的远端与导向头131相连,内芯132的近端与中钢管133的远端固定。
56.其中,导向头131用于支撑鞘管组件120的内腔。
57.具体的,在本实施例中,导向头131呈纺锤形。需要说明的是,在其他实施例中,导向头也可不呈纺锤形。在一替代性实施例中,导向头呈圆锥形。
58.更具体的,在本实施例中,导向头131采用pebax(pebax:聚醚酰胺嵌段共聚物)制成,以避免戳伤心脏或人体组织血管。需要说明的是,在其他可变更的实施例中,导向头也可采用其他材料制成,如:tpu(tpu:热塑性聚氨酯弹性体)等。
59.继续参见图6,在本实施例中,内芯132用于支撑装载在输送装置内的瓣膜假体,即内芯132支撑被夹子111束缚的瓣膜假体,中钢管133用于支撑鞘管组件120。进一步的,在本实施例中,内芯132的抗弯性能弱于中钢管133。如此,当鞘管组件120回撤释放瓣膜假体时,导向头131在心房内有一定的顺应性而不至于戳破心房。
60.优选的,继续参见图1与图7,输送装置还包括:手柄140,手柄140用于驱使控制件112与夹子111相对移动。
61.进一步的,同时参见图2、图6与图8,夹持组件110还包括控制管118;手柄140包括第一驱动组件141以及壳体142;内管组件130的近端被配置与壳体142固定连接,内管组件130的远端被配置为承载瓣膜假体;控制管118套设于内管组件130。
62.具体的,在本实施例中,内管组件130的中钢管133的近端与手柄140的壳体142固定,以将内管组件130与手柄140固定。
63.在本实施例中,控制管118的近端与第一驱动组件141连接,控制管118的远端与夹子111连接,控制件112固定于内管组件130并远离控制管118,且第一驱动组件141用于驱动控制管118移动、以使控制管118相对于内管组件130移动。
64.具体的,在本实施例中,夹子111布置于控制管118的远端,控制件112固定于内管组件130,且控制件112固定在内管组件130的位置远离控制管118。当第一驱动组件141驱动控制管118移动、以使控制管118相对于内管组件130移动时,夹子111在控制管118的带动下相对于固定在内管组件130上的控制件112向远端移动,使得夹子111从第一工作状态变为第二工作状态。
65.更具体的,继续参见图6,控制件112位于内芯132与中钢管133之间、并分别与内芯132的近端以及中钢管133的远端相连,以将内芯132的近端与中钢管133的远端固定,且使控制件112固定于内管组件130。
66.进一步的,继续参见图2与图8,夹持组件110还包括连接管119,连接管119套设于
控制管118的远端;夹子111周向分布于连接管119的外部。具体的,在本实施例中,夹子111的数量为两个,两个夹子111相对设置并分布于连接管119的外部;更具体的,夹子111的主体部113与连接管119固定。
67.需要说明的是,在一替代性实施例中,也可不设有连接管,如此,可直接将夹子周向分布于控制管的外部、并与控制管固定。
68.另外,同时参见图1与图3,控制通道115的数量与夹子111的数量相同,且每一控制通道115与多个夹子111中的一者对应设置。在本实施例中,由于夹子111的数量为两个,因此,控制通道115的数量也为两个。
69.需要说明的是,本实施例对夹子111的数量不做限定。在一示范性实施例中,夹子的数量为四个,此时,控制通道的数量也为四个。
70.在一替代性实施例中,控制管的近端与第一驱动组件连接,控制管的远端与控制件连接,且控制管远端设有行程槽,夹子通过行程槽固定于位于控制管内部的内管组件,且第一驱动组件用于驱动控制管移动、以使控制管相对于内管组件移动。如此,由于控制管的近端与第一驱动组件连接,控制管的远端与控制件连接,且控制管远端设有行程槽,夹子通过行程槽固定于在内管组件,当驱动组件驱动控制管移动、以使控制管相对于内管组件向近端移动时,控制件在控制管的带动下远离固定在内管组件上的夹子,使得夹子从第一工作状态变为第二工作状态。
71.优选的,在本实施例中,继续参见图8,第一驱动组件141包括:螺杆143以及螺母144,螺杆143位于壳体142内,且被配置禁止轴向转动,螺杆143与控制管118的近端固定,螺母144套设在螺杆143上并与螺杆143螺纹连接;壳体142设有第一开口,螺母144的至少部分经由第一开口露出壳体142。如此,操作输送装置的操作者可操作经由第一开口露出壳体的至少部分螺母144,以经由螺杆143驱动控制管118移动。
72.具体的,参见图9,在本实施例中,第一驱动组件141还包括第一导向件105和第二导向件106,第一导向件105设置在壳体142上,第二导向件106设置在螺杆143上,第一导向件105的延伸方向与螺杆143的轴向方向同向,第二导向件106沿第一导向件105的延伸方向可滑动地设置在第一导向件105上,以阻止螺杆143轴向转动。
73.更具体的,在本实施例中,第一导向件105为设置在壳体142上的轨道;第二导向件106为设置在螺杆143上、并与第一导向件105嵌合的凹槽。
74.需要说明的是,在其他可替代的实施例中,用于阻止螺杆轴向转动技术方案也可与上述技术方案不同。在一替代性实施例中,也可使得第一导向件沿第二导向件的延伸方向可滑动地设置在第二导向件上,以阻止螺杆轴向转动。
75.还需说明的是,在其他可替代的实施例中,第一驱动组件也可不包括螺杆以及螺母,只要第一驱动组件可用于驱动控制管移动、以使控制管相对于内管组件移动即可。在一替代性实施例中,第一驱动组件包括:齿条以及齿轮,齿条位于壳体内,且被配置只能沿其延伸方向移动,齿条与控制管的近端固定,齿轮与齿条啮合;壳体设有开口,齿轮的至少部分经由开口露出壳体。如此,操作输送装置的操作者可操作经由开口露出壳体的至少部分齿轮,以经由齿条驱动控制管移动。
76.更进一步的,继续参见图5,手柄140还包括第二驱动组件145,鞘管组件120与第二驱动组件145连接,且第二驱动组件145用于驱动鞘管组件120移动、以使鞘管组件120相对
于内管组件130移动。如此,可通过第二驱动组件145驱动鞘管组件120移动,以通过鞘管组件120沿远离或靠近导向头131的方向移动来控制瓣膜假体的释放或回收。在鞘管组件120完成瓣膜假体的释放后,如果瓣膜假体释放的位置合适,则继续操作控制件112,使控制件112与夹子111相对运动,以使夹子111从第一工作状态变为第二工作状态,实现瓣膜假体的完全释放。
77.同时参见图7,优选的,在本实施例中,第二驱动组件145包括:鞘管组件连接件146、螺杆147以及螺母148,鞘管组件连接件146与鞘管组件120近端以及螺杆147的远端相连,螺杆147位于壳体142内并被配置为禁止轴向转动,螺母148套设在螺杆147上并与螺杆147螺纹连接,壳体142还设有第二开口,螺母148的至少部分经由第二开口露出壳体142。如此,操作输送装置的操作者可操作经由第二开口露出壳体的至少部分螺母148,以经由螺杆147驱动鞘管组件120移动。
78.具体的,在本实施例中,第二驱动组件145还包括连接器149,连接器149被配置为与壳体142保持相对固定,其中,螺杆147设有沿其延伸方向延伸的凸台,凸台安装连接器149上的凹槽内以使得螺杆147禁止轴向转动。
79.需要说明的是,在其他可替代的实施例中,第二驱动组件也可不包括螺杆以及螺母,只要第二驱动组件可用于驱动鞘管组件移动即可。在一替代性实施例中,第二驱动组件包括:齿条以及齿轮,齿条位于壳体内,且被配置只能沿其延伸方向移动,齿条经由鞘管组件连接件与鞘管组件的近端固定,齿轮与齿条啮合;壳体设有开口,齿轮的至少部分经由开口露出壳体,如此,操作输送装置的操作者可操作经由开口露出壳体的至少部分齿轮,以经由齿条驱动鞘管组件移动。
80.另外,还需说明的是,本实施例对任意两个零部件之间的固定方式不做限定。在一示范性实施例中,相互固定的两个零部件采用焊接的方式固定。在一替代性实施例中,相互固定的两个零部件采用卡接的方式固定。在另一替代性实施例中,相互固定的两个零部件采用螺钉螺接的方式固定。
81.本技术实施例二提供一种瓣膜假体系统,包括:瓣膜假体以及输送装置,瓣膜假体包括结合端,结合端设有卡槽,卡槽用于与输送装置的夹子可拆卸连接。
82.具体的,输送装置包括:夹持组件;夹持组件包括至少两个夹子和控制件;夹子具有第一工作状态和第二工作状态,在第一工作状态时,夹子被配置束缚瓣膜假体的结合端,在第二工作状态时,夹子被配置与瓣膜假体分离;控制件用于与夹子相对运动,以使夹子从第一工作状态变为第二工作状态。
83.事实上,本技术实施例二提供的瓣膜假体系统包括的输送装置与上述实施例一提供的输送装置相同,因此,本技术实施例二提供的瓣膜假体系统包括的输送装置具有与上述实施例一提供的输送装置相同的技术效果,在此不再赘述。
84.本领域的普通技术人员可以理解,上述各实施方式是实现本技术的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本技术的精神和范围。任何本领域技术人员,在不脱离本技术的精神和范围内,均可作各自更动与修改,因此本技术的保护范围应当以权利要求限定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。