1.本实用新型属于装车设备技术领域,具体涉及一种智能装车系统。
背景技术:
2.对于煤块、河沙、散装大米、大豆等具有一定流动性的颗粒物料,目前常采用人工配合输送带的方式进行装车,具体为将输送带的输出端移动至货车的货箱顶部,然后向输送带的输入端人工装入颗粒物料,通过输送带将颗粒物料提升并落入货箱内部。
3.现有技术中,如授权公告号为cn212475349u的中国实用新型专利文献,公开了一种散装颗粒物料装车系统,机架包括立柱、支撑梁和行走梁,立柱上方为支撑梁,支撑梁中部固定布料装置,机架的两侧面设置行走梁,行走梁上方设置可水平移动的水平行走架,水平行走架上中部下方安装压料装置;其中布料装置底部空间有限,每次装载完成都需要等待满载车辆开出,空载车辆才能进入,进行装料,空载车辆进入需要将货箱与布料装置对准定位,耗费时间,进而导致装车的效率不高。
4.再有,如授权公告号为cn203497755u的中国实用新型专利文献,公开了一种装料机,其中,设置驱动输出连接拨料轮,其中拨料轮左右两端同轴对称设置绞龙,拨料轮驱动轴与输送带被动轮处于同轴心位置;行走机架上方设置驾驶室,驾驶室左侧设置支撑架,并在其上设置铰链与输送带机架相连;支撑架左侧设置液压支撑,且液压支撑与输送带机架连接,并可使输送带机架以铰链为中心旋转15
゜‑
45
゜
;输送带机架前端设置机头,并与拨料轮驱动轴相连;每个装料机设置1个输送带机架;其中每次向货箱内部进行布料,都要对装料机进行移动,一个货箱装载完毕后,往往需要移动较长的距离才能够进行下一次装车,并且每次装车的输入端不同,难以高效的向拨料轮处供应物料完成装车。
5.因此,需要设计一种自动定位货箱,缩短装车间隙,提高装车效率,降低劳动强度及人工成本的智能装车系统来解决目前所面临的技术问题。
技术实现要素:
6.针对现有技术中所存在的不足,本实用新型提供了一种自动定位货箱,缩短装车间隙,提高装车效率,降低劳动强度及人工成本的智能装车系统。
7.本实用新型的技术方案为:智能装车系统,包括机架,所述机架的顶部沿y轴方向滑动设置有进料支架、落料支架及驱动所述落料支架沿y轴方向移动的y轴驱动机构,所述进料支架的底部设置有第四输送带;所述落料支架的顶部沿x轴方向滑动设置有落料框架及驱动所述落料框架沿x轴方向移动的x轴驱动机构,所述第四输送带的输出端活动连接在所述落料框架的底部,所述机架的顶部一侧设置有第二输送带,所述第二输送带的一端设置有第一输送带,所述进料支架的顶部设置有与所述第二输送带相垂直的第三输送带,所述第三输送带的输入端设置有用于将所述第二输送带顶部的物料导入第三输送带的导料板,所述第三输送带的输出端与所述第四输送带的输入端相对应;所述机架上设置有用于所述机架内货箱定位的视觉定位相机,所述落料框架的底部设置有用于观察货箱内部情况
的视觉相机。
8.所述落料框架的内部沿竖直方向滑动设置有x轴移动架,所述x轴移动架滑动设置在所述落料支架的顶部,所述x轴移动架的顶部设置有驱动所述落料框架沿竖直方向移动的升降气缸。
9.所述落料框架的下方设置有下铰接臂,所述下铰接臂上铰接有下托板,所述第四输送带的输出端固定在所述下托板的内部。
10.所述下铰接臂的上端中部与所述落料框架转动连接。
11.所述进料支架的下方设置有上铰接臂,所述上铰接臂上铰接有上托板,所述第四输送带的输入端固定在所述上托板的内部。
12.所述上铰接臂的上端中部与所述进料支架转动连接。
13.所述导料板的一端设置有导料板支架,所述导料板支架固定在所述第三输送带的端部侧面。
14.所述第三输送带的下方设置有导料斗,所述导料斗的下端与所述第四输送带的输入端相对应,所述导料斗固定在所述进料支架上。
15.所述机架的顶部设置有y轴轨道,所述进料支架及所述落料支架的端部与所述y轴轨道滑动连接。
16.所述落料支架的顶部设置有x轴轨道,所述落料框架与所述x轴轨道滑动连接。
17.本实用新型的有益效果:
18.(1)本实用新型中的智能装车系统,通过视觉定位相机进行定位,能够自动准确的将第四输送带移动至货箱定位进行自动装车;一个货箱装车完毕后,可通过x轴驱动机构及y轴驱动机构快速移动至另一货箱处进行装车,装车间隔时间短,提升装车效率;
19.(2)通过第一输送带、第二输送带、第三输送带及第四输送带之间相互配合,能够实现对机架大部分覆盖范围内的货箱装填,减少人工介入,降低劳动强度及人工成本。
附图说明
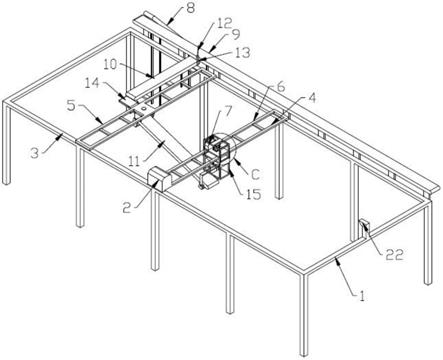
20.图1为本实用新型中智能装车系统的结构示意图之一。
21.图2为本实用新型中智能装车系统的结构示意图之二。
22.图3为图2中a处的局部放大图。
23.图4为图2中b处的局部放大图。
24.图5为图1中c处的局部放大图。
具体实施方式
25.现在将参照附图来详细描述本实用新型的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。本实用新型可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本实用新型透彻且完整,并且向本领域技术人员充分表达本实用新型的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示例性的,而不是作为限制。
26.本实用新型中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或
者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
27.如图1至5所示,智能装车系统,包括机架1,机架1具有矩形框架结构的顶框101及均匀分布在顶框101底部的若干支腿102,支腿102垂直固定在顶框101的底部,定义与顶框101较长边相平行的方向为y轴方向,较短边相平行的方向为x轴方向;机架1的顶部沿y轴方向滑动设置有进料支架5、落料支架4及驱动落料支架4沿y轴方向移动的y轴驱动机构2,进料支架5的底部设置有第四输送带11;落料支架4的顶部沿x轴方向滑动设置有落料框架15及驱动落料框架15沿x轴方向移动的x轴驱动机构7,第四输送带11的输出端活动连接在落料框架15的底部,机架1的顶部一侧设置有第二输送带9,第二输送带9的一端设置有第一输送带8,进料支架5的顶部设置有与第二输送带9相垂直的第三输送带10,第三输送带10的输入端设置有用于将第二输送带9顶部的物料导入第三输送带10的导料板12,第三输送带10的输出端与第四输送带11的输入端相对应;机架1上设置有用于机架1内货箱定位的视觉定位相机22,落料框架15的底部设置有用于观察货箱内部情况的视觉相机23;其中第一输送带8的倾斜设置,第一输送带8的输入端位于地面,用于将地面处的物料输送至第二输送带9处,第二输送带9将第一输送带8输出的物料沿y轴方向进行输送,通过导料板12拦截导流,将第二输送带9顶部的物料导流至第三输送带10顶部,第三输送带10输出物料至第四输送带11顶部,通过第四输送带11将物料导入至货箱内部,完成装车;在本实施例中,机架1的内部下方可停入多辆货车,通过视觉定位相机22能够采集机架1下方货车的货箱位置信息,获取位置信息后可通过x轴驱动机构7及y轴驱动机构2,按照获取到的货箱位置移动落料框架15,使第四输送带11的输出端与货箱对应,启动输送带相货箱内部输送物料,通过视觉相机23可采集货箱内的物料是否装满,装满后视觉定位相机22再采集一次货车的货箱位置信息,通过x轴驱动机构7及y轴驱动机构2驱动第四输送带11的输出端移动至下一货箱处进行装车;本实施例中的智能装车系统,通过视觉定位相机进行定位,能够自动准确的将第四输送带11移动至货箱定位进行自动装车;一个货箱装车完毕后,可通过x轴驱动机构7及y轴驱动机构2快速移动至另一货箱处进行装车,装车间隔时间短,提升装车效率;通过第一输送带8、第二输送带9、第三输送带10及第四输送带11之间相互配合,能够实现对机架1大部分覆盖范围内的货箱装填,减少人工介入,降低劳动强度及人工成本。
28.进一步的,为了使第四输送带11的输出端高度可调,适用于不同高度的货箱装车,如图1和5所示,落料框架15的内部沿竖直方向滑动设置有x轴移动架21,x轴移动架21滑动设置在落料支架4的顶部,x轴移动架21的顶部设置有驱动落料框架15沿竖直方向移动的升降气缸20;落料框架为长方体框架结构,x轴移动架21的两侧均固定设置有与x轴移动架21侧面滑动抵接的限位板24,通过限位板24的限位导向作用,使落料框架15沿x轴移动架21的竖直方向滑动,通过升降气缸20活塞杆的伸缩作用,可带动落料框架15上下移动进而带动其下方的第四输送带11输出端上下移动,实现第四输送带11的输出端高度可调。
29.如图2和3所示,落料框架15的下方设置有下铰接臂17,下铰接臂17上铰接有下托板16,第四输送带11的输出端固定在下托板16的内部,具体的,下铰接臂17及下托板16均为u型板体,下托板16的两端部分别与下铰接臂17的两端部相铰接,第四输送带11的输出端底
部与下托板16的顶部相固定,由此在落料框架15上下移动的过程中,通过下托板16与下铰接臂17之间的发生转动,配合落料框架15的移动。
30.进一步的,下铰接臂17的上端中部与落料框架15转动连接,当x轴驱动机构7驱动落料框架15沿落料支架4进行移动时,下铰接臂17与落料框架15之间产生相对旋转,可避免对落料框架15的移动造成干涉。
31.如图2和4所示,进料支架5的下方设置有上铰接臂19,上铰接臂19上铰接有上托板18,第四输送带11的输入端固定在上托板18的内部,具体的,上铰接臂19及上托板18均为u型板体,上托板18的两端部分别与上铰接臂19的两端部相铰接,第四输送带11的输入端底部与上托板18的顶部相固定,由此在落料框架15上下移动的过程中,第四输送带11上下摆动,通过下托板16与下铰接臂17之间的发生转动,配合第四输送带11的摆动。
32.进一步的,上铰接臂19的上端中部与进料支架5转动连接,当x轴驱动机构7驱动落料框架15沿落料支架4进行移动时,下铰接臂17与落料框架15之间产生相对旋转,同时第四输送带11也发生旋转,上铰接臂19与进料支架5转动连接,可避免对第四输送带11的转动造成干涉。
33.如图1所示,导料板12的一端设置有导料板支架13,导料板支架3上与导料板12相背离的一端固定在第三输送带10输入端的端部侧面,导料板12为板体结构,导料板12的自由端相第二输送带9的输入端倾斜,由此可将第二输送带9上的物料导向至第三输送带10顶部,当y轴驱动机构2驱动落料支架4在机架1顶部移动时,通过第四输送带11可带动进料支架5同步在机架1顶部移动,第三输送带10及导料板12均固定在进料支架5上,故两者均随进料支架5一起在机架1顶部移动,无论移动至任何位置,导料板12均对第二输送带9顶部的物料具有导向作用;进一步的,可在导料板12的底部增设与第二输送带9顶部相接触的毛刷,毛刷固定在导料板12的底部,通过毛刷可将第二输送带9顶部的物料拦截彻底,同时减小对第二输送带9的磨损。
34.为了避免第三输送带10向第四输送带11输送物料时物料洒落,第三输送带10的下方设置有导料斗14,导料斗14的下端逐渐收缩,导料斗14的下端与第四输送带11的输入端相对应,导料斗14固定在进料支架5上,通过导料斗14可增大接收第三输送带10输出物料的面积,同时将物料汇聚在一起导流至第四输送带11,可避免物料在输送过程中洒落。
35.进一步的,机架1的顶部设置有y轴轨道3,进料支架5及落料支架4的端部与y轴轨道3滑动连接,具体的,进料支架5及落料支架4的端部均设置有与y轴轨道3相匹配的滑轮或者滑块;落料支架4的顶部设置有x轴轨道6,落料框架15与x轴轨道6滑动连接,具体的,落料框架15通过滑轮或滑块与x轴轨道6滑动连接;其中x轴驱动机构7及y轴驱动机构2均为现有技术的利用,现有技术中有多种可选的实施方式,本技术不涉及对两者的改进;例如,x轴驱动机构7及y轴驱动机构均具有伺服电机、装配在伺服电机上的齿轮及固定在机架1顶部与该齿轮相啮合的齿条,齿条固定在机架1、落料支架4顶部,伺服电机固定在落料支架4端部、落料框架15内部,通过伺服电机驱动齿轮在齿条上移动。
36.至此,已经详细描述了本实用新型的各实施例。为了避免遮蔽本实用新型的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
37.以上所述实施例仅表达了本实用新型的部分实施方式,其描述较为具体和详细,
但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。