1.本实用新型涉及自动化技术领域,尤其涉及一种清洁机器人。
背景技术:
2.随着科学技术的发展,越来越多的清洁机器人走进了人们的生活。例如:扫地机器人、拖地机器人等。这些清洁机器人给人们的生产和生活带来了极大的便利。
3.清洁机器人在进行工作之前,需要针对具体的工作环境,创建工作地图。相关技术中,清洁机器人在自动创建工作地图,以及利用创建好的工作地图进行工作的过程中,常使用激光雷达传感器扫描周围环境信息。激光组件安装于清洁机器人的顶部,安装座由电机通过皮带轮带动,露出清洁机器人的机壳,且需要为激光组件设置碰撞保护机构,造成清洁机器人高度较高,不利于进入低矮的空间,如床底、柜底等。相关技术中,出于成本的考虑,使用二维激光雷达传感器,分辨率不高,无法实现准确的定位。
4.因此,亟需一种定位准确度高、占用尺寸小的传感器组件供清洁机器人使用。
技术实现要素:
5.为克服相关技术中存在的至少一个问题,本实用新型提供一种清洁机器人。
6.根据本实用新型实施例的第一方面,提供一种清洁机器人。包括:
7.壳体;
8.激光雷达传感器组件,设置于所述壳体的顶部所在平面以下的位置,用于获取清洁机器人周围环境的激光点云数据,所述激光雷达传感器组件包括激光雷达传感器;
9.视觉传感器组件,包括视觉传感器,所述视觉传感器组件设置于所述壳体的顶部所在平面以下的位置,所述视觉传感器组件用于获取清洁机器人周围环境的图像数据;所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于所述视觉传感器组件的视野之外;
10.处理器,设置于所述壳体内部,所述处理器电性连接于所述激光雷达传感器组件和所述视觉传感器组件,用于对所述激光点云数据和所述图像数据进行处理。
11.在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面。
12.在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面1-3mm;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面1-3mm。
13.在一种可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离大于零。
14.在一种可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离的范围是1-3mm。
15.在一种可能的实现方式中,所述视觉传感器组件与所述壳体前端的距离小于等于所述激光雷达传感器组件与所述前端壳体的距离。
16.在一种可能的实现方式中,所述激光雷达传感器组件还包括旋转激光座和电机,所述旋转激光座用于固定所述激光雷达传感器,所述电机直接驱动所述旋转激光座转动。
17.在一种可能的实现方式中,所述激光雷达传感器组件的高度小于等于40mm。
18.在一种可能的实现方式中,所述视觉传感器组件还包括补光单元。
19.在一种可能的实现方式中,所述补光单元的工作频段与所述激光雷达传感器发射激光的频段不同。
20.在一种可能的实现方式中,,所述清洁机器人还包括滤光单元。
21.在一种可能的实现方式中,激光雷达一个周期内的扫描区域包括前向区域和后向区域,所述补光单元工作于激光雷达扫描所述后向区域的时间段内;其中,所述前向区域为所述清洁机器人前进方向上位于所述清洁机器人前方的区域,所述后向区域为所述清洁机器人前进方向上位于所述清洁机器人后方的区域。
22.在一种可能的实现方式中,所述清洁机器人还包括安装于所述壳体前侧的光学透明视窗,所述激光雷达传感器发射或接收的激光透过所述光学透明视窗,所述光学透明视窗呈弧形状,所述光学透明视窗的角度大于或等于所述激光雷达传感器预设的前向扫描的角度。
23.在一种可能的实现方式中,所述处理器包括:
24.通信组件,用于接收所述视觉传感器传输的图像数据以及激光雷达传感器传输的激光点云数据;
25.处理组件,用于将所述激光点云数据与所述图像数据转换至同一坐标系中,并基于所述激光点云数据和所述图像数据,确定所述清洁机器人的工作地图和/或障碍物的位置。。
26.在一种可能的实现方式中,所述处理器所述处理器包括:
27.第一处理组件,用于基于所述图像数据确定障碍物位置;
28.第二处理组件,用于基于所述激光点云数据所述清洁机器人的工作地图。
29.本实用新型的实施例提供的技术方案可以包括以下有益效果:本实用新型实施例,将激光雷达传感器组件设置于清洁机器人的壳体内部,降低了清洁机器人的尺寸高度,使得清洁机器人可以进入较为低矮的空间。通过设置所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于所述视觉传感器组件的视野之外,使得所述视觉传感器的扫描区域与所述激光雷达传感器的扫描区域互相不遮挡,在缩小两传感器所占空间的同时,视觉传感器可以为清洁机器人提供近处的环境信息,激光雷达传感器可以为清洁机器人提供远处的环境信息,两者相互融合,提高了清洁机器人检测的准确度。
30.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型。
附图说明
31.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的实施例,并与说明书一起用于解释本实用新型的原理。
32.图1是根据一示例性实施例示出的一种清洁机器人的应用场景图。
33.图2是根据一示例性实施例示出的一种工作地图。
34.图3是根据一示例性实施例示出的一种清洁机器人的结构示意图。
35.图4是根据一示例性实施例示出的一种清洁机器人的结构示意图。
36.图5是根据一示例性实施例示出的一种激光雷达传感器组件的结构示意图。
37.图6是根据一示例性实施例示出的一种激光雷达传感器组件安装结构示意图。
38.图7是根据一示例性实施例示出的一种激光雷达传感器组件扫描周期示意图。
39.图8是根据一示例性实施例示出的一种清洁机器人的结构示意图。
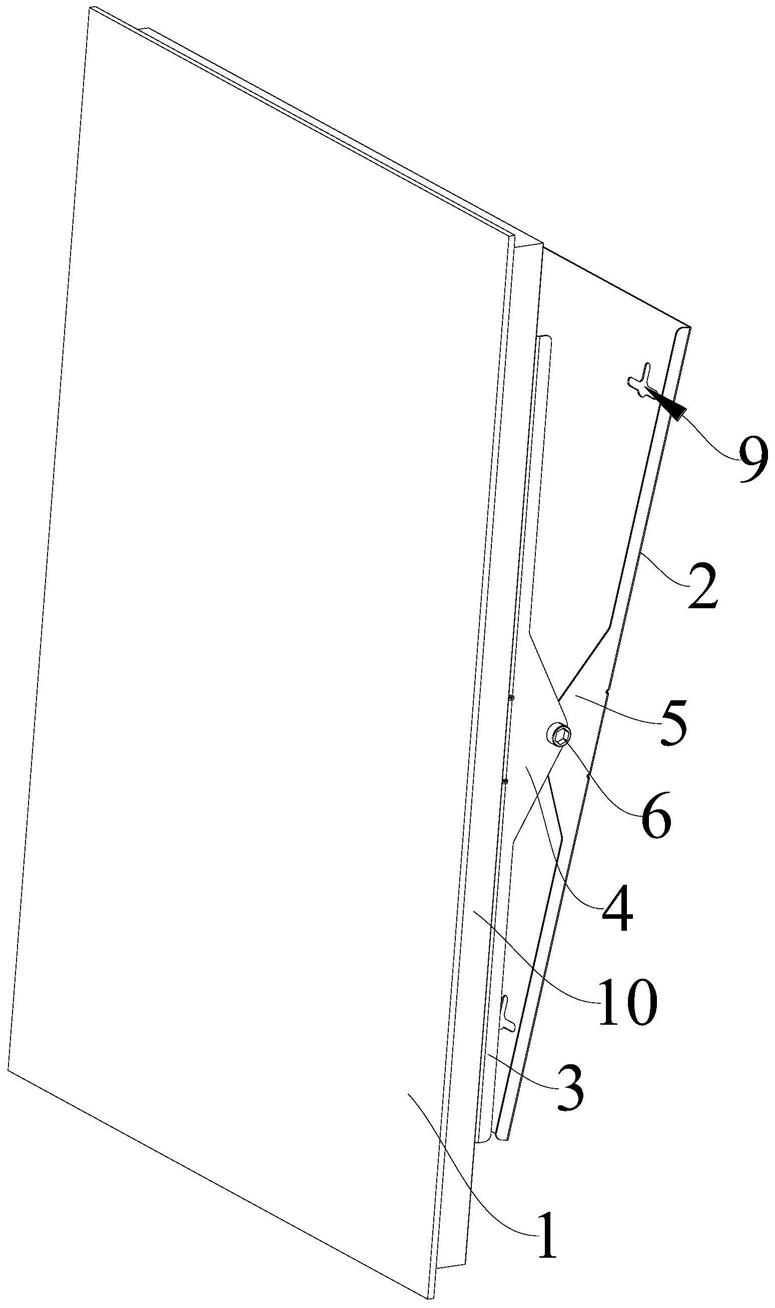
40.图9是根据一示例性实施例示出的一种清洁机器人的结构示意图。
具体实施方式
41.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
42.为了方便本领域技术人员理解本实用新型实施例提供的技术方案,下面先对技术方案实现的技术环境进行说明。
43.二维激光雷达的包括一颗激光雷达发射器,利用旋转装置,水平扫描周围环境。相关技术中,将二维激光雷达设置于机器人的顶部,水平扫描的方式很容易漏识别低矮的障碍物,如楼梯和玩具等。二维激光雷达为间断式发射,每旋转一角度,发射一次激光,这就有可能导致一些较窄的物体,如桌腿、椅子没有被扫描到,因此,单纯依靠二维激光雷达所生成的工作地图,还不够精准。视觉传感器可以获取较多的周围环境的图像数据,数据量较大时,常影响其处理速率,不适合在光纤比较弱的环境中使用。
44.基于类似于上文所述的实际技术需求,本实用新型提供了一种清洁机器人。
45.图1是根据一示例性实施例示出的一种清洁机器人的应用场景图。参考图1所示,清洁机器人100在房间103内自动行驶,利用激光雷达传感器组件和视觉传感器组件获取周围环境的激光点云数据和图像数据,例如房间103的墙角边沿,家居101的四周边沿,处理器根据获取到的激光点云数据和所述图像数据,控制清洁机器人100沿墙角边沿向前行驶,并记录下,墙角边沿的位置数据,从而确定清洁机器人的工作地图。在一个示例中,图2是根据一示例性实施例示出的一种工作地图。图2中虚线展示的工作地图为与图1中房间103相对应的工作地图。
46.图3是根据一示例性实施例示出的一种清洁机器人的结构示意图。参考图3所示,一种清洁机器人,其特征在于,包括:
47.壳体111;
48.激光雷达传感器组件107,设置于所述壳体111的顶部所在平面以下的位置,例如壳体111的前端或内部,,用于获取清洁机器人周围环境的激光点云数据,所述激光雷达传感器组件107包括激光雷达传感器及驱动单元;
49.视觉传感器组件108,包括视觉传感器,视觉传感器组件108设置于所述壳体111的顶部所在平面以下的位置,视觉传感器组件108可以设置于壳体111的内部,也可以设置于壳体111上。所述视觉传感器组件108用于获取清洁机器人周围环境的图像数据,所述视觉
传感器组件108设于所述激光雷达传感器组件107的扫描区域之外,所述激光雷达传感器组件107设于所述视觉传感器组件108的视野之外。
50.处理器112,设置于所述壳体111内部,与所述激光雷达传感器组件107和所述视觉传感器组件108电性连接,用于对所述激光点云数据和所述图像数据进行处理。
51.本实用新型实施例中,所述激光雷达传感器组件107可以包括二维激光雷达传感器,所获取的数据包括点激光点云数据,主要由发射机、接收机、测量控制和电源组成。激光雷达在工作时,首先向被测目标发射一束激光,然后测量反射或散射信号到达发射机的时间、信号强弱程度和频率变化等参数,从而确定被测目标的距离、运动速度以及方位。本实用新型实施例中,所述视觉传感器组件108可以包括单目视觉传感器、双目视觉传感器和多目视觉传感器。其中,所述单目视觉传感器包括一个相机。所述双目视觉传感器从两个相机观察同一物体,以获取在不同视角下的感知图像,然后通过三角测量原理计算图像像素间的位置偏差来获取景物的三维信息。在双目视觉传感器中,采用两个摄像机作为视觉信号的采集设备,通过双输入通道图像采集卡与处理器连接,把摄像机采集到的模拟信号经过采样、滤波、强化、模数转换,最终向处理器提供图像数据。所述多目视觉传感器包括多个相机,分别设置于多个视点,或者由一个摄像机从多个视点观测三维物体。本实用新型实施例中,所述处理器可以包括cpu、gpu、mcu等多种处理器件,所述处理器具有控制器、运算器,其中还包括高速缓冲存储器及实现它们之间联系的数据、控制的总线等,能够运算计算机程序。
52.本实用新型实施例中,所述视觉传感器组件与所述激光雷达传感器组件具有预设的结构关系,以使所述视觉传感器的扫描区域与所述激光雷达传感器的扫描区域互相不遮挡。具体来讲,所述视觉传感器设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于所述视觉传感器组件的视野之外。本实用新型实施例中,所述视觉传感器的扫描区域可以包括具有圆锥状的视线场,可以对上下左右场景进行识别。所述激光雷达传感器的扫描区域为一水平面,可以包括360度的扫描平面或预设角度的扇形平面。在一个示例中,参考图1所示,所述视觉传感器组件在所述激光雷达传感器组件的前方,这里的前方指的是靠近清洁机器人车身头部位置,使得视觉传感器组件扫描的区域109不被激光传感器组件遮挡。所述视觉传感器组件在所述激光雷达传感器的竖直方向的下方,使得激光雷达传感器组件发射的激光110不被视觉传感器组件遮挡。在一个示例中,所述激光雷达传感器组件与所述视觉传感器组件在竖直方向上可以有部分重叠,以节省空间结构。在一个实例中,参考图4所示,所述视觉传感器组件和所述激光雷达传感器组件到清洁机器人车头的距离相等或两距离之差小于预设值,即所述视觉传感器组件可以位于所述激光雷达传感器组件的底部,以使所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器发射的激光110不被视觉传感器组件遮挡。通过设置所述视觉传感器组件到清洁机器人车头前方的距离以及所述激光雷达传感器组件到清洁机器人车头前方的距离,可以使激光雷达传感器组件设于所述视觉传感器组件的视野之外,所述视觉传感器的扫描的区域109不被激光雷达传感器组件遮挡。
53.本实用新型实施例,将激光雷达传感器组件设置于清洁机器人的壳体内部,降低了清洁机器人的尺寸高度,使得清洁机器人可以进入较为低矮的空间。通过设置所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于
所述视觉传感器组件的视野之外,使得所述视觉传感器的扫描区域与所述激光雷达传感器的扫描区域互相不遮挡,在缩小两传感器所占空间的同时,视觉传感器可以为清洁机器人提供近处的环境信息,激光雷达传感器可以为清洁机器人提供远处的环境信息,两者相互融合,提高了清洁机器人检测的准确度。
54.在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面。
55.本实用新型实施例中,所述视觉传感器组件的最高面可以包括视觉传感器组件的顶部所在的平面,所述最高面低于所述激光雷达传感器的扫描面,以使视觉传感器组件位于激光雷达传感器的扫描区域之外,所述视觉传感器组件的最低面可以包括视觉传感器组件底部所在的平面,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面,也可以视觉传感器组件位于激光雷达传感器的扫描区域之外。
56.在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面1-3mm;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面1-3mm。
57.本实用新型实施例通过上述设置可以缩小两传感器的占用空间。
58.在一种可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离大于零。在一个可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离的范围是1-3mm。本实用新型实施例中所述视觉传感器组件与所述激光雷达传感器组件的水平距离大于或等于第一预设长度,可以使得两传感器组件在工作时,较为安全。
59.在一种可能的实现方式中,所述视觉传感器组件与所述壳体前端的距离小于等于所述激光雷达传感器组件与所述前端壳体的距离。
60.本实用新型实施例中,所述视觉传感器组件与清洁机器人前端壳体的距离小于等于所述激光雷达传感器组件与所述前端壳体的距离,可以保证视觉传感器的扫描区域不被激光雷达传感器组件遮挡。
61.本实用新型实施例中,参考图3所示,所述视觉传感器组件108与清洁机器人前端壳体的距离可以包括:所述视觉传感器组件108的几何中心到清洁机器人前端壳体的距离。类似的,所述激光雷达传感器组件107与所述前端壳体的距离可以包括:所述激光雷达传感器组件107的几何中心到清洁机器人前端壳体的距离。在所述视觉传感器组件108和所述激光雷达传感器组件107为不规则形状时,上述距离也可包括两器件的重心到前端壳体的距离。本实用新型实施例中,所述前端壳体包括清洁机器人的车头端的壳体,或清洁机器人行驶方向上的壳体。本实用新型实施例中,所述视觉传感器组件108与所述激光雷达传感器组件107的水平距离,如图3所示,视觉传感器组件108的最后面与激光雷达传感器组件107的最前面的距离l2,大于零。由于激光雷达传感器组件107包括旋转部件,因此需要与视觉传感器组件108保持一定的安全距离。在一个示例中,所述第一预设长度包括0mm。本实用新型实施例中,所述视觉传感器组件的最高面低于所述激光雷达传感器的扫描面第二预设长度,如图3中的l1。在一个示例中,所述第二预设长度包括1-3mm。或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面1-3mm。本实用新型实施例中,所述激光雷达传感器组件与所述前端壳体的距离大于或等于第三预设长度,在一个示例中,所述第三预设长度包括20-30mm。在一个示例中,所述激光雷达传感器组件和视觉传感器组件也可以并排设
置。
62.本实用新型实施例,所述激光雷达传感器组件与所述前端壳体的距离大于或等于第三预设长度,可以确保激光雷达传感器的扫描精度。
63.图5是根据一示例性实施例示出的一种激光雷达传感器组件的结构示意图。参考图5所示,所述激光雷达传感器组件还包括旋转激光座和电机,所述旋转激光座用于固定所述激光雷达传感器,所述电机直接驱动所述旋转激光座转动。所述激光雷达传感器组件107包括外壳113、旋转激光座125和电机122,所述旋转激光座125和所述电机122分别设置于所述外壳113的内部和外部,所述旋转激光座125通过轴承120配接于连接件121,所述电机122的输出轴与所述连接件121固定连接,通过所述连接件121和轴承带动所述旋转激光座125转动。
64.本实用新型实施例中,电机122和旋转激光座125通过轴承和链接件121直接连接,中间无其他连接部,如皮带轮等,因此,可以减小激光雷达传感器组件的体积,大大减小其占用的内部空间,从而减小清洁机器人的尺寸。
65.在一个示例中,参考图5所示,所述旋转激光座125的顶部设置有数据预处理线路板124,所述数据预处理线路板124上设置有发电感应电路118、激光信号发射电路116,所述数据预处理线路板124的上方设置有数据接收线路板123,所述数据接收线路板123上设置有激光信号接收电路115、发电线圈或发电磁钢117。
66.本实用新型实施例中,所述激光雷达传感器组件的高度小于等于40mm。参考图5所示,本实用新型实施例中,可以通过将现有的内转子电机替换为外转子电机,去掉现有的皮带轮,并将上述线路板激光雷达传感器组件的内部,可以使得激光雷达传感器组件的高度小于等于40mm,优选的高度h可以做到35mm。本实用新型实施例中,激光雷达传感器组件可以全部放置于壳体内部,直径d可以做到小于或等于50mm。
67.本实用新型实施例,相较于现有的激光雷达传感器组件设置于清洁机器人的顶部,清洁机器人的总高度(从清洁机器人的轮子到激光雷达传感器的顶部),一般为95mm,其中,激光雷达传感器的组件总高度为55mm,例如,40mm在清洁机器人的内部,15mm在清洁机器人的外部,而雷达传感器组件的长度为108mm,直径为75mm。本实用新型实施例,采用上述结构布局激光传感器组件,可以极大缩减激光传感器组件的尺寸,保证清洁机器人壳体内部空间有效利用,降低清洁机器人的高度。
68.本实用新型实施例,采用上述结构布局激光传感器组件,可以极大缩减激光传感器组件的尺寸,保证清洁机器人壳体内部空间有效利用,降低清洁机器人的高度。
69.在一种可能的实现方式中,所述视觉传感器组件还包括补光单元,所述补光单元用于产生红外光或全光谱光源。
70.本实用新型实施例中,为所述视觉传感器设置补光单元,可以增加视觉传感器的检测敏感度,使其在光照不佳的夜晚也能够工作。在一个示例中,所述补光单元可以产生红外光,红外光较为安全,人眼不可见,从而清洁机器人在夜间工作的时候,也不会影响用户的休息,并且不受室内光强度的影响,稳定性高。在另一个示例中,所述补光单元可以产生全光谱光源,所述全光谱单元可以在复杂的环境下,如花纹瓷砖、地毯上的污渍进行针对性识别。例如,绿光对灰尘敏感、蓝光对含铁物质敏感、紫光对部分有机物敏感等。可以利用所述全光谱源以轮询的方式切换各个频率的光谱,以识别周围环境的物体,具有检测准确度
高的有益效果。
71.图6是根据一示例性实施例示出的一种激光雷达传感器组件安装结构示意图。参考图6所示,所述视觉传感器包括双目视觉传感器,所述双目视觉传感器包括第一摄像头130和第二摄像头131,双目视觉传感器以及激光雷达传感器组件还包括滤光单元,如滤光片,一方面,滤光片可以滤除其他波段的光,减少干扰;另一方面,双目视觉传感器的滤光片可以滤除来自激光雷达传感器组件的光线干扰,激光雷达传感器组件的滤光片可以滤除来自双目视觉传感器补光单元产生的光线干扰。
72.在一种可能的实现方式中,所述红外光的频段与所述激光雷达传感器发射激光的频段不同。本实用新型实施例,红外光和激光采用不同频段的光,可以避免补光单元和激光雷达传感器误接对方发送的光,避免两者之间相互干涉。
73.图7是根据一示例性实施例示出的一种激光雷达传感器组件扫描周期示意图。参考图7所示,激光雷达一个周期内的扫描区域包括前向区域和后向区域,所述补光单元工作于激光雷达扫描所述后向区域的时间段内;其中,所述前向区域为所述清洁机器人前进方向上位于所述清洁机器人前方的区域,例如:以清洁机器人的前进方向为基准线,左右旋转相同角度得到一扇形扫描区域。所述后向区域为所述清洁机器人前进方向上位于所述清洁机器人后方的区域,例如在激光雷达一个扫描周期内扫描的区域减去前向区域。本实用新型实施例中,所述激光雷达传感器的扫描周期包括激光雷达传感器扫描一个周360度所需要的时间,参考图7所示,激光雷达传感器的坐标原点150位于清洁机器人的中心线上,所述后向扫描区域包括激光雷达传感器扫描b角度,所述前向扫描区域包括所述激光雷达传感器扫描a角度。本实用新型实施例中,补光单元工作于激光雷达后向扫描时段,可以避免补光单元和激光雷达传感器误接对方发送的光,避免两者之间相互干涉。
74.在一种可能的实现方式中,参考图7所示,所述还包括碰撞传感器140,所述碰撞传感器140位于所述清洁机器人前进方向的壳体前部,沿所述壳体前部延伸至所述壳体两侧,其中延伸部分至少占所述清洁机器人的侧部长度的1/2。
75.本实用新型实施例中,碰撞传感器140有助于清洁机器人在碰撞到障碍物或墙体的时候,确定障碍物或墙体的方位,及时的调整行驶的方向,避免清洁机器人受到损伤。
76.在一种可能的实现所述清洁机器人还包括光学透明视窗,所述光学透明视窗嵌设于所述碰撞传感器上,所述激光传感器发射或接收的激光透过所述光学透明视窗,所述光学透明视窗呈弧形状,所述光学透明视窗的角度大于或等于所述激光雷达传感器预设的前向扫描的角度。
77.本实用新型实施例,所述碰撞传感器的外侧设置有光学透明视窗,由于,所述碰撞传感器延伸至所述壳体两侧,其中延伸部分至少占所述清洁机器人的侧部长度的1/2,因此,光学透明视窗的范围较大,可以为激光雷达传感器提供的较大的扫描角度范围。
78.图8至图9是根据一示例性实施例示出的一种清洁机器人的结构示意图。参考图8和图9所示,所述激光雷达传感器组件107为可升降式,通过升降机构将所述激光雷达传感器组件升起或降落。参考图8所示,所述激光雷达传感器组件107通过升降机构降至清洁机器人的壳体内部,参考图9所示,所述激光雷达传感器组件107通过升降机构上升至清洁机器人的壳体顶部。
79.本实用新型实施例,激光雷达传感器组件107具有升降功能,当需要进入低矮的空
间时,将所述激光雷达传感器组件107下降,以降低清洁机器人的高度,当不需要进入低矮的空间时,则将所述激光雷达传感器组件107上升,以获得更高的激光点云数据。
80.在一种可能的实现方式中,所述处理器包括:
81.通信组件,用于接收所述视觉传感器传输的图像数据以及激光雷达传感器传输的激光点云数据;
82.处理组件,用于将所述激光点云数据与所述图像数据转换至同一坐标系中,并基于所述激光点云数据和所述图像数据,确定所述清洁机器人的工作地图和/或障碍物的位置。
83.在一种可能的实现方式中,所述处理器包括:
84.第一处理组件,用于基于所述图像数据确定障碍物位置;
85.第二处理组件,用于基于所述激光点云数据所述清洁机器人的工作地图。
86.本实用新型实施例中,所述处理器可以包括进行运算和逻辑运算,内部结构大概可以分为控制单元、算术逻辑单元和存储单元等几个部分。按照其处理信息的字长可以分为:八位微处理器、十六位微处理器、三十二位微处理器以及六十四位微处理器。可以从图像数据中确定图像的特征。其中,图像特征可以包括图像的灰度特征、形状特征、尺寸特征等。所述形状特征用于工作区域内物体三维大小和形状。所述尺寸特征可以包括:灰度大小区域矩阵特征(gray level size zone matrix features,glszm)、灰度游程长度矩阵特征(gray level run length matrix features,glrlm),所述灰度大小区域矩阵特征用于量化物体的灰度区域。灰度区域定义为具有相同灰度强度的连接体素的数量;所述灰度游程长度矩阵特征用于量化具有相同灰度值的连续像素的灰度运行,其定义为以像素数为单位的连续像素的长度。本实用新型实施例中,所述激光点云数据可以可采用法线估计方法提取点云特征,法线估计方法的优点是,计算速度较快,对于较为复杂的场景可以使用点特征直方图方法,通过参数化查询点与邻域点之间的空间差异,并形成一个多维直方图对点的k邻域几何属性进行描述,直方图所在的高维超空间为特征表示提供了一个可度量的信息空间,对点云对应曲面的6维姿态来说它具有不变性,并且在不同的采样密度或邻域的噪音等级下具有鲁棒性;还可以采用计算量较小的快速点特征直方图以及抗分辨率变化旋转图像方法来提取点云特征信息。根据视觉传感器和激光雷达传感器在清洁机器人的相对位置关系,可以通过旋转平移的方式,将所述特征点云数据转换至所述激光点云数据所在的坐标系中。根据所述激光点云数据和所述特征点云数据,确定待测物,如墙角线到清洁机器人的位置距离,从而确定所述清洁机器人的工作地图。本实用新型实施例中上述处理器对图像数据以及激光点云数据的处理方法,可借助于现有的计算机程序实现,本实用新型实施例不涉及对计算机程序或方法的改进。
87.本领域技术人员在考虑说明书及实践这里实用新型的实用新型后,将容易想到本实用新型的其它实施方案。本技术旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本实用新型未实用新型的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由下面的权利要求指出。
88.应当理解的是,本实用新型并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本实用新型的范围仅由所附的权利要
求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。