技术特征:
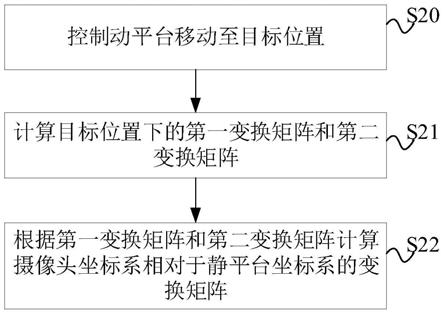
1.一种手眼标定方法,其特征在于,所述方法包括:控制动平台移动至目标位置;所述目标位置为摄像头能够拍摄到所述动平台的位置;计算所述目标位置下的第一变换矩阵和第二变换矩阵;其中,所述第一变换矩阵为标定板坐标系相对于静平台坐标系的变换矩阵,所述第二变换矩阵为所述标定板坐标系相对于摄像头坐标系的变换矩阵;根据所述第一变换矩阵和所述第二变换矩阵计算所述摄像头坐标系相对于所述静平台坐标系的变换矩阵。2.根据权利要求1所述的方法,其特征在于,计算所述目标位置下的第一变换矩阵和第二变换矩阵,包括:根据机器人运动学计算所述目标位置下的第三变换矩阵;其中,所述第三变换矩阵为所述动平台坐标系相对于所述静平台坐标系的变换矩阵;根据所述第三变换矩阵和预存的第四变换矩阵计算所述第一变换矩阵;其中,所述第四变换矩阵为所述标定板坐标系相对于动平台坐标系的变换矩阵;根据视觉检测算法计算所述第二变换矩阵。3.根据权利要求1所述的方法,其特征在于,所述根据所述第一变换矩阵和所述第二变换矩阵计算所述摄像头坐标系相对于静平台坐标系的变换矩阵,包括:根据公式计算所述摄像头坐标系相对于静平台坐标系的变换矩阵;其中,t表示所述摄像头坐标系相对于静平台坐标系的变换矩阵,t1表示所述第一变换矩阵,表示所述第二变换矩阵的逆矩阵。4.根据权利要求1所述的方法,其特征在于,所述控制动平台移动至目标位置,包括:判断当前还需要进行标定的次数是否为0;在当前还需要进行标定的次数不为0的情况下,控制所述动平台移动至目标位置。5.根据权利要求4所述的方法,其特征在于,所述方法还包括:在当前还需要进行标定的次数为0的情况下,根据多个已经获取到的所述摄像头坐标系相对于所述静平台坐标系的变换矩阵,计算所述摄像头坐标系相对于所述静平台坐标系的平均变换矩阵。6.一种手眼标定装置,其特征在于,所述装置包括:控制模块,用于控制动平台移动至目标位置;所述目标位置为摄像头能够拍摄到所述动平台的位置;第一计算模块,用于计算所述目标位置下的第一变换矩阵和第二变换矩阵;其中,所述第一变换矩阵为标定板坐标系相对于静平台坐标系的变换矩阵,所述第二变换矩阵为所述标定板坐标系相对于摄像头坐标系的变换矩阵;第二计算模块,用于根据所述第一变换矩阵和所述第二变换矩阵计算所述摄像头坐标系相对于所述静平台坐标系的变换矩阵。7.根据权利要求6所述的装置,其特征在于,所述第一计算模块还用于根据预存的第三变换矩阵计算所述目标位置下的第四变换矩阵;其中,所述第三变换矩阵为所述标定板坐标系相对于动平台坐标系的变换矩阵,所述第四变换矩阵为所述动平台坐标系相对于所述静平台坐标系的变换矩阵;
根据所述第三变换矩阵和所述第四变换矩阵计算所述第一变换矩阵;根据视觉检测算法计算所述第二变换矩阵。8.根据权利要求6所述的装置,其特征在于,所述第二计算模块还用于根据公式计算所述摄像头坐标系相对于静平台坐标系的变换矩阵;其中,t表示所述摄像头坐标系相对于静平台坐标系的变换矩阵,t1表示所述第一变换矩阵,表示所述第二变换矩阵的逆矩阵。9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机程序,所述处理器可执行所述计算机程序以实现权利要求1-5任一所述的方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-5中任一项所述的手眼标定方法。
技术总结
本发明实施例提出一种手眼标定方法、装置、电子设备和计算机可读存储介质,涉及机器人标定技术领域。该方法通过控制动平台移动至目标位置;目标位置为摄像头能够拍摄到动平台的位置,计算目标位置下的第一变换矩阵和第二变换矩阵;其中,第一变换矩阵为标定板坐标系相对于静平台坐标系的变换矩阵,第二变换矩阵为标定板坐标系相对于摄像头坐标系的变换矩阵;根据第一变换矩阵和第二变换矩阵计算摄像头坐标系相对于静平台坐标系的变换矩阵,从而无需分别对两个位姿下机械臂进行分析,并对方程求解,标定过程简单且运算量小,提高了标定效率。效率。效率。
技术研发人员:刘庆飞 黎赣彤
受保护的技术使用者:广州极飞科技股份有限公司
技术研发日:2021.12.29
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。