1.本发明涉及磁性轴承装置,该磁性轴承装置包括定子以及支承在定子中以绕旋转轴线进行旋转的转子。
背景技术:
2.主动式磁性轴承通常用于在没有物理接触的情况下支承移动部件。如果移动部件是被支承以绕旋转轴线进行旋转的转子,则已知的是通过主动式磁性轴承来控制转子的径向位移和轴向位移。
3.在通常采用的设计中,主动式径向磁性轴承包括软磁定子芯,该软磁定子芯具有径向向内延伸、通常被称为“齿”的结构。每个定子齿与转子形成气隙,转子也是软磁的。在定子齿上或相邻的定子齿之间设置有定子绕组。定子绕组中的电流导致通过定子芯、相关联的定子齿和转子的磁通量,这在定子与转子之间产生吸引磁阻力。相邻齿之间的区域通常被称为“槽”,并且因此这种设计类型通常被称为“带槽”设计。
4.这种传统设计并不适于具有小直径(例如,在几厘米以下的直径)的转子。对于小直径转子,定子齿与转子之间的气隙的长度相对于转子直径变得相对较大,从而导致相对较高的磁阻。因此,需要相对较大的绕组来产生足够的轴承力。这增加了成本和尺寸。
5.因此,期望提供一种用于控制转子的至少径向位移的磁性轴承装置,该磁性轴承装置可以以紧凑且成本有效的方式构造,从而使其特别适于小型转子。
6.c.zwyssig等人在proceedings of the 2014international power electronics conference-ecce asia(ipec 2014)(2014年国际电力电子会议论文集——ecce亚洲(ipec 2014)),hiroshima,japan(日本广岛),第1707至1714页,2014年5月的出版物“high-speed magnetically levitated reaction wheel demonstrator(高速磁悬浮反作用轮演示器)”中公开了一种双异极/单极无槽自轴承马达。在异极部分中,转子包括在直径上被磁化的永磁体。马达绕组和轴承绕组被安置在转子与无槽定子芯之间的气隙中。在单极部分中,转子包括具有相反磁性的两个在轴向上被磁化的永磁体。对应的定子部分是无铁的。该定子部分包括两个轴向轴承绕组和多个径向轴承绕组,每个轴向轴承绕组绕转子轴线在方位上被卷绕并且被安置在其主要看到径向磁场的位置,径向轴承绕组轴向地布置在轴向轴承绕组之间。径向轴承绕组的匝基本上在筒形表面上延伸。
7.m.kaufmann等人在proceedings of the 23rd international symposium on power electronics,electrical drives,automation and motion(speedam2016)(第23届电力电子、电气驱动、自动化和运动国际研讨会(speedam2016))论文集,anacapri,italy(意大利阿纳卡普里),第28至33页,2016年6月的“high-speed magnetically levitated reaction wheels for small satellites(用于小型卫星的高速磁悬浮反作用轮)”以及a.t
ü
ys
ü
z等人在ieee transactions on industrial electronics(ieee工业电子学报),第66卷,第8期,第6404至6407页,2019年8月的“a300’000-r/min magnetically levitated reaction wheel demonstrator(300’000转/分钟的磁悬浮反作用轮演示器)”中也公开了
相同的设计。
8.这种设计需要相当大的空间,并且可以在单极部分中产生的轴承力相当有限。
9.t.baumgartner、j.w.kolar在ieee/asme transactions on mechatronics(ieee/asme机电一体化学报),第20卷,第3期,第1149至1159页,2015年6月的出版物“multivariable state feedback control of a 500000-r/min self-bearing permanent-magnet motor(500000转/分钟的自轴承永磁马达的多变量状态反馈控制)”中公开了一种自轴承马达。转子包括三个永磁体:在轴向被磁化的永磁体以及两个在直径上被磁化的永磁体,在轴向上被磁化的永磁体布置于两个在直径上被磁化的永磁体之间。轴向轴承绕组围绕在轴向上被磁化的永磁体,并且轴向轴承力通过与该磁体的相互作用而产生。马达绕组和轴承绕组被安置于在直径上被磁化的永磁体与无槽磁性定子芯之间的气隙中。径向轴承力是由与在直径上被磁化的永磁体的相互作用而引起的。同样在这种设计中,径向轴承绕组的匝基本上在筒形表面上延伸。
10.这种设计相对复杂。
11.d.steinert等人在ieee transactions on industrial electronics(ieee工业电子学报),第61卷,第11期,第5974至5986页,2014年11月的出版物“slotless bearingless disk drive for high-speed and high-purity applications(用于高速和高纯度应用的无槽无轴承磁盘驱动器)”中公开了一种在环状无槽磁性定子芯上具有环形绕组的无轴承马达。转子包括异极的在直径上被磁化的环状磁体。转子抵抗轴向和倾斜位移的稳定性由被动磁阻力提供,并且未设置轴向轴承绕组。d.steinert等人在ieee transactions on industry applications(ieee工业应用学报),第52卷,第1期,第172至180页,2016年1月/2月的“evaluation of one-and two-pole-pair slotless bearingless motors with toroidal windings(具有环形绕组的单极对和双极对无槽无轴承马达的评估)”中还公开了一种具有异极环状转子的无轴承马达,其限定一个或两个极对。
12.这种设计的适用性仅限于极短的环状转子。
技术实现要素:
13.本发明的目的是提供一种用于控制转子的至少径向位移的磁性轴承装置,该磁性轴承装置可以以紧凑且成本有效的方式构造,从而使其特别适于小型转子。
14.该目的通过具有权利要求1的特征的磁性轴承装置来实现。本发明的其他实施方式在从属权利要求中给出。
15.因此,提供了一种磁性轴承装置,该磁性轴承装置包括:
16.定子以及支承在定子中以绕旋转轴线进行旋转的转子,
17.转子包括沿着旋转轴线被磁化的至少一个永磁体,
18.定子包括围绕转子的至少一个闭合磁芯以及以环形构型布置在所述至少一个闭合磁芯上的至少一个径向轴承绕组,所述至少一个径向轴承绕组布置成与由至少一个在轴向上被磁化的永磁体产生的永磁场相互作用,以在电流被供应至所述至少一个径向轴承绕组时获得径向轴承力。
19.通过在闭合磁芯上以环形构型设置至少一个径向轴承绕组并结合包括在轴向上
被磁化的永磁体的转子,可以实现非常紧凑的设计,同时可以获得大的径向轴承力。
20.芯优选地包括软磁材料或由软磁材料组成。闭合磁芯通常将是环状的。有利地,闭合磁芯不具有从芯的闭合环部分朝向转子向内延伸的任何齿,并且因此闭合磁芯不具有位于齿之间的任何空隙或“槽”。因此,这种磁芯可以被认为是“无槽的”。
21.特别地,闭合磁芯可以具有环形面的形状。环形面是在中间具有孔的旋转表面,像甜甜圈一样。旋转轴线穿过孔并且因此不与表面相交。例如,当矩形绕着与其边缘中的一个边缘平行的轴线旋转时,就会产生矩形截面的环形面。呈环形面的形状的闭合磁芯被称为环形磁芯。尽管如果闭合磁芯具有精确的环形形状则是有利的,但是闭合磁芯可以偏离精确的环形形状,并且可以例如具有环形多面体的形状。
22.在本公开的上下文中,如果绕组围绕由闭合磁芯形成的环延伸,绕组的匝中的每一匝均穿过环的中央孔并在环的外部处返回,则绕组应当被理解为具有“环形构型”。环形构型的绕组不需要并且通常将不会相对于其旋转轴线沿着闭合磁芯的整个圆周延伸。事实上,绕组可以仅沿着所述圆周的一小部分延伸。在下文中,术语“具有环形构型的绕组”和“环形绕组”将用作同义词。
23.优选地,在共同的闭合磁芯上设置有至少两个径向轴承绕组,这些绕组中的每一者均具有环形构型并且布置成与由所述至少一个在轴向上被磁化的永磁体产生的永磁场相互作用。然后可以向所述至少两个径向轴承绕组供应电流,使得由所述电流中的每个电流产生的磁通量在闭合磁芯内部沿着不同的周向方向定向。这对于使可获得的径向力最大化是有利的。特别地,提供布置于转子的在直径上相对的侧部上的至少一对径向轴承绕组是有利的。
24.在一些实施方式中,磁性轴承装置包括第一磁性导引环和第二磁性导引环,第一磁性导引环和第二磁性导引环中的每一者围绕转子,第一磁性导引环布置在所述至少一个径向轴承绕组的第一轴向侧上,并且第二磁性导引环布置在所述至少一个径向轴承绕组的与第一轴向侧相反的第二轴向侧上。第一磁性导引环可以构造成在至少一个永磁体的第一轴向端部部分与闭合磁芯的第一轴向端部部分之间导引永磁场,并且第二磁性导引环可以构造成在至少一个永磁体的第二轴向端部部分与闭合磁芯的第二轴向端部部分之间导引永磁场。像闭合磁芯一样,磁性导引环有利地包括软磁材料或由软磁材料组成。每个磁性导引环优选地具有环形形状、特别地具有带中央孔的扁平圆盘形状。每个磁性导引环优选地具有至少与闭合磁芯的外径一样大的外径。出于构造上的原因,可以优选的是,磁性导引环的外径至少与径向轴承绕组的最大外径一样大。第一导引环和第二导引环优选地是定子的一部分。
25.在一些实施方式中,转子包括布置成在轴向上邻近于至少一个永磁体的至少一个磁性导引盘,所述至少一个磁性导引盘构造成将永磁场集中在转子与闭合磁芯之间的径向间隙区域中。每个磁性导引盘有利地包括软磁材料或由软磁材料组成。所述至少一个磁性导引盘的目的如下:通过具有环形构型,所述至少一个径向轴承绕组包括布置在所述径向间隙区域中的多个轴向导体部分(即,大致平行于旋转轴线或等效地平行于闭合磁芯的中央轴线延伸的导体部分或者至少沿具有大的轴向分量的方向延伸的导体部分)。所述至少一个磁性导引盘然后将用于将永磁场集中在设置有这些内部轴向导体部分的区域中,从而有助于使可获得的径向力最大化。
26.在一些有利的实施方式中,转子包括沿着旋转轴线被磁化成具有相反的极性的第一永磁体和第二永磁体。以此方式,永磁场将在第一永磁体和第二永磁体相遇的轴向位置周围具有特别高的径向分量,从而使得能够产生特别强的径向轴承力。
27.在这样的实施方式中,如果转子包括轴向地布置在第一永磁体与第二永磁体之间、优选地紧邻两个永磁体的磁性导引盘,则是有利的。然后,磁性导引盘将用于在下述区域中进一步将永磁场集中在转子与闭合磁芯之间的径向间隙中:在该区域中,永磁场的径向分量已经特别高,因此进一步有助于产生强的径向轴承力。同样,磁性导引盘优选地包括软磁材料或由软磁材料组成。
28.在一些实施方式中,定子包括在沿着旋转轴线的不同轴向位置处围绕转子的第一闭合磁芯和第二闭合磁芯、围绕第一闭合磁芯以环形构型布置的至少一个第一径向轴承绕组以及围绕第二闭合磁芯以环形构型布置的至少一个第二径向轴承绕组。第一径向轴承绕组和第二径向轴承绕组两者布置成与由所述至少一个在轴向上被磁化的永磁体产生的永磁场相互作用,以在电流被供应至第一径向轴承绕组和第二径向轴承绕组时获得径向轴承力。在这种情况下,位于径向轴承绕组的轴向端部处的附加的磁性导引环可以容易地被省去,因为闭合磁芯通常已经将永磁场导引至足够的程度。
29.如果所述至少一个在轴向上被磁化的永磁体沿着旋转轴线仅具有一个单一极性,即如果所述至少一个在轴向上被磁化的永磁体的极性沿着旋转轴线不改变,则这种设计是特别有利的。特别地,转子可以仅包括单个在轴向上被磁化的永磁体。
30.如果所述至少一个永磁体沿着旋转轴线仅具有单一极性,则在转子包括布置于所述至少一个永磁体的在轴向上相反的端部处的第一磁性导引盘和第二磁性导引盘的情况下是特别有利的。然后,第一磁性导引盘可以构造成将永磁场集中在转子与第一闭合磁芯之间的径向间隙区域中,并且第二磁性导引盘可以构造成将永磁场集中在转子与第二闭合磁芯之间的径向间隙区域中。同样,这些导引盘优选地包括软磁材料或由软磁材料组成。
31.在一些实施方式中,磁性轴承装置还包括围绕转子在方位上卷绕的至少一个轴向轴承绕组,所述至少一个轴向轴承绕组布置成与由所述至少一个在轴向上被磁化的永磁体产生的永磁场相互作用,以在电流被供应至所述至少一个轴向轴承绕组时获得轴向轴承力。在一些实施方式中,磁性轴承装置包括布置于所述至少一个径向轴承绕组的在轴向上相反的侧部上的两个轴向轴承绕组。在其他实施方式中,磁性轴承装置包括布置在转子与闭合磁芯之间、特别地布置在转子与所述至少一个径向轴承装置之间的径向间隙中的至少一个轴向轴承绕组。当然也可以将这两种可能性结合起来。
32.在一些实施方式中,磁性轴承装置包括至少一个径向位移传感器以及控制器,所述至少一个径向位移传感器用于检测转子的径向位移,控制器配置成接收来自所述至少一个径向位移传感器的信号并且产生用于所述至少一个径向轴承绕组的径向控制信号,以便操纵转子的径向位置。特别地,控制器可以配置成将转子稳定在期望的径向位置。
33.磁性轴承装置还可以包括用于检测转子的轴向位移的至少一个轴向位移传感器,并且控制器还可以配置成接收来自所述至少一个轴向位移传感器的信号并且产生用于所述至少一个轴向轴承绕组的轴向控制信号,以便操纵转子的轴向位置、特别地将转子稳定在期望的轴向位置。
34.通常,磁性轴承装置将包括多于一个的径向轴承绕组,特别地包括分布在所述至
少一个闭合磁芯的圆周上的两个、三个、四个、六个或更多个径向轴承绕组。然后,以如下方式连接径向轴承绕组是有利的:如果磁性轴承装置包括在转子的在直径上相对的侧部上以环形构型布置在共同的闭合磁芯上的至少一对径向轴承绕组,则以反串联或反并联配置连接该对径向轴承绕组是有利的。如果磁性轴承装置包括以环形构型沿着共同的闭合磁芯的圆周分布的至少三个径向轴承绕组,则以星形配置或三角形配置连接径向轴承绕组是有利的。如果存在至少六个径向轴承绕组,例如,如果存在三对两个在直径上相对的径向轴承绕组,则两种可能性可以结合。在这种情况下,以反串联或反并联配置连接每对绕组并以星形或三角形配置连接各对绕组是有利的。
附图说明
35.下面参照附图对本发明的优选实施方式进行描述,这些附图是出于对本发明的优选实施方式进行说明的目的,而不是出于对本发明的优选实施方式进行限制的目的。在附图中:
36.图1以立体图示出了磁性轴承装置的第一实施方式;
37.图2以立体图示出了不具有其壳体部分的第一实施方式的磁性轴承装置;
38.图3以中央纵向截面示出了第一实施方式的磁性轴承装置;
39.图4示出了穿过图1至图3的磁性轴承装置在图3的平面a-a中的简化的横截面;
40.图5以中央纵向截面示出了磁性轴承装置的第二实施方式;
41.图6以中央纵向截面示出了磁性轴承装置的第三实施方式;
42.图7以侧视图示出了磁性轴承装置的第四实施方式;
43.图8以中央纵向截面示出了第四实施方式的磁性轴承装置;
44.图9以侧视图示出了磁性轴承装置的第五实施方式;
45.图10以中央纵向截面示出了第五实施方式的磁性轴承装置;
46.图11示出了图示包括四个环形绕组的径向轴承的示意图;
47.图12示出了图示图11中的径向轴承的四个环形绕组可以如何连接的示意电路图;
48.图13示出了图示用于驱动图11中的径向轴承的环形绕组的放大器的示意电路图;
49.图14示出了图示包括六个环形绕组的径向轴承的示意图;
50.图15示出了图示图14中的径向轴承的六个环形绕组可以如何连接的第一可能性的示意电路图;
51.图16示出了图示图14中的径向轴承的六个环形绕组可以如何连接的第二可能性的示意电路图;
52.图17示出了图示图14中的径向轴承的六个环形绕组可以如何连接的第三可能性的示意电路图;
53.图18示出了图示包括以星形配置连接的三个环形绕组的径向轴承的示意图;以及
54.图19示出了图示用于驱动呈三相配置(可用于根据图15、图16、图17或图18的绕组方案)的绕组的放大器的示意电路图。
具体实施方式
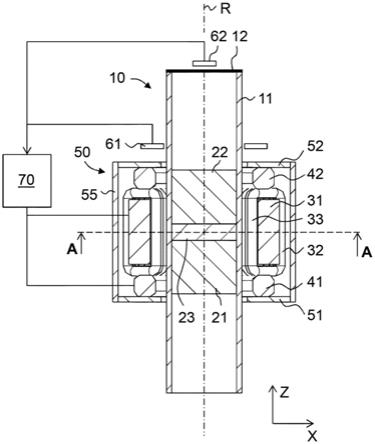
55.在图1至图3中,图示了根据本发明的磁性轴承装置的第一实施方式。图1示出了包
括其壳体的磁性轴承装置,而图2示出了不具有壳体的装置。在图3中,图示了磁性轴承装置的附加部件,所述附加部件在图1和图2中不存在。
56.转子10包括由非磁性材料如奥氏体钢、钛、铝或纤维增强塑料制成的中空管11。为了使涡流引起的损失最小化,由具有高电阻率的材料制造中空管11可能是有利的。在中空管11内部,保持有第一永磁体21和第二永磁体22。两个永磁体21、22均在轴向上被磁化。两个永磁体21、22具有相反的极性。在轴向上、在永磁体21、22之间并且紧邻永磁体21、22,保持有磁性导引盘23。磁性导引盘23由软磁材料制成、即由具有高磁导率、低矫顽力(例如,低于100a/m)和低磁滞的铁磁性或亚铁磁性材料制成。合适的软磁材料在本领域中是公知的。示例包括超莫合金、坡莫合金、电工钢和所谓的软铁氧体。
57.定子30围绕转子10。定子30包括由软磁材料制成的环状闭合磁芯31,磁芯31围绕转子10。在磁芯31上设置有呈环形构型的六个径向轴承绕组32。径向轴承绕组32在图2和图3中以高度示意性的方式被图示,以单层布置在磁芯31的表面上的每个绕组被图示为仅有五匝。实际上,径向轴承绕组当然可以具有高得多的匝数,并且这些匝不需要以单层存在于磁芯31表面上。
58.在径向轴承绕组32的两个轴向侧上设置有第一轴向轴承绕组41和第二轴向轴承绕组42。每个轴向轴承绕组41、42在方位上围绕转子10延伸并且与环状磁芯31同轴布置。此外,轴向轴承绕组41、42仅以高度简化的方式被示出。特别地,应当理解的是,轴向轴承绕组41、42中的每一者可以具有任意的匝数。
59.在轴向上邻近于每个轴向轴承绕组41、42、在背离径向轴承绕组32的轴向侧上,布置有由软磁材料制成的磁性导引环51、52。每个磁性导引环51、52绕转子10延伸,从而具有带中央孔的扁平盘形状,转子10穿过该中央孔。由软磁材料制成的筒形磁性导引套筒55围绕径向轴承绕组32、轴向轴承绕组41、42和磁性导引环51、52,从而在磁性导引环51、52的相应的外圆周处接触磁性导引环51、52。磁性导引环51、52和磁性导引套筒55一起形成磁性轴承装置的壳体50。
60.在壳体50外部的区域中围绕转子的圆周以规则的间隔设置有多个径向位移传感器61。转子10的中空管11在一个端部处用端板12封闭。在旋转轴线r上、面向目标板12布置有轴向位移传感器62。径向位移传感器61和轴向位移传感器62可以是例如涡流传感器,因为径向位移传感器和轴向位移传感器在本领域中是公知的。用于位移传感器的导电目标可以设置在中空管11的外圆周以及端板12上。
61.控制器70接收来自径向位移传感器61和轴向位移传感器62的位移信号,并且基于位移信号得到用于径向轴承绕组32和轴向轴承绕组41、42的控制信号。控制器70还包括用于驱动径向轴承绕组32和轴向轴承绕组41、42的功率放大器。
62.磁性轴承装置被操作成将转子10保持在期望位置而不接触定子。在本示例中,期望位置是图3中所示的位置。在该位置中,转子10的旋转轴线r与由环状磁芯31和轴向轴承绕组41、42的共同的中央轴线限定的中央轴承轴线重合,并且磁性导引盘23在第一轴承绕组41与第二轴向轴承绕组42之间轴向居中。转子10从期望位置的径向位移由径向位移传感器61检测,而轴向位移由轴向位移传感器62检测。基于来自径向位移传感器61和轴向位移传感器62的信号,控制器得到控制信号,该控制信号使功率放大器向径向轴承绕组32和轴向轴承绕组41、42供应电流,以使径向位移和轴向位移最小化或使已经从径向位移和轴向
位移得到的目标值最小化。
63.现在将参照图4对磁性轴承装置内部的磁场分布进行说明,图4示出了穿过图1至图3的磁性轴承装置在平面a-a中的简化横截面。应当注意的是,图4被大大简化并且没有按比例绘制。仅示出了转子管11内部的磁性导引盘23、环状磁芯31以及沿着x轴在转子的在直径上相对的侧部上各有一匝的两个绕组32中的每个绕组。
64.反向磁化的永磁体21、22产生单极永磁场、即假设永磁体21、22中的理想的各向同性条件以及完全旋转对称的转子10和定子30而绕旋转轴线r旋转对称的磁场。磁场产生磁通量。磁通量由磁性导引盘23集中并且从轴向方向偏转到径向方向。磁通量基本上沿着径向方向离开磁性导引盘23并穿过转子10与环状磁芯31之间的径向间隙。在该区域中、即在环状磁芯31的内侧,通量密度b具有大的径向分量。磁通量然后进入磁芯31并且在磁芯31内部基本上偏转到相反的轴向方向。在磁芯31的轴向端部附近,磁通量离开磁芯31并且返回到永磁体21、22中,从而穿过磁性导引环51、52。磁性导引环51、52与筒形导引套筒55一起基本上将磁场限制在壳体50的内部。
65.径向轴承力通过如下方式产生。如在图3和图4中明显的是,每个径向轴承绕组32的每一匝包括内部轴向导体部分33,该内部轴向导体部分33在环状磁芯31的内部沿着大致轴向方向延伸。该内部轴向导体部分33暴露于转子10与环状磁芯31之间的径向间隙中的径向磁通量。当电流流过内部轴向导体部分33时,电流局部地改变磁通量分布,如在图4中由虚线圆所图示的。这将对转子产生力。如果大小相同但方向相反的电流流过转子10的在直径上相对的侧部上的两个这样的内部轴向导体部分33,则将在转子与定子之间产生净径向力f。因此,例如为了产生沿着y方向的净径向力,可以向转子10的相对于x方向的在直径上相对的侧部上的径向轴承绕组32供应大小相同但方向相反的电流。对于本领域技术人员来说明显的是,本着同样的精神,可以通过向径向轴承绕组32供应合适的电流来产生沿着任意径向方向的净径向力。应当注意的是,在环状芯31的外部流动的在径向轴承绕组32的每一匝中的返回电流会产生相反取向的力,然而该力作用在壳体50与定子30之间,并且因此不会对转子产生力。
66.轴向轴承力主要由轴向轴承绕组41、42中的电流与这些绕组的位置处的磁通量密度的径向分量的相互作用产生。通过向轴向轴承绕组41、42供应相同大小和相同方向的电流,可以容易地产生净轴向轴承力。
67.数值模拟已经表明,磁性轴承装置的各部分之间的以下相对比例是有利的:
[0068]-永磁体21、22和磁性导引盘23应当一起具有沿着旋转轴线r的轴向长度,该轴向长度至少对应于磁芯31的轴向长度,优选地至少对应于径向轴承绕组32的轴向长度。另一方面,该轴向长度应当优选地不超过磁性导引环51、52的外轴向端面之间的距离,以便将磁通量基本上限制在由壳体50界定的体积内。
[0069]-磁性导引盘23应当具有沿着轴向方向测量的足够大的厚度,以避免在所有操作条件下发生磁饱和。另一方面,磁性导引盘23的轴向厚度应当优选地明显小于磁芯31的轴向长度。优选地,磁性导引盘23的轴向厚度为磁芯31的轴向长度的至多50%。
[0070]-磁性导引环51、52可以具有沿着轴向方向测量的小得多的厚度,因为这些环的饱和不会对装置的操作不利。例如,每个磁性导引环51、52可以由相对较薄(2mm以下)的钢板制成的简单盘制成,中央孔穿过该钢板冲压而成。
[0071]-磁性导引环51、52的外径应当至少与轴向轴承线圈41、42的外径一样大,以合理地限制由这些线圈产生的磁场。无关该要求,磁性导引环51、52的外径还应当至少与环状磁芯31的外径一样大,并且优选地至少与径向轴承线圈32的外径一样大,以便于机械组装。
[0072]-磁性导引套筒55并不关键并且可以被省去。磁性导引套筒55的沿着径向方向测量的厚度可以很小,因为接近导引套筒的磁饱和的操作不会对装置的操作不利。例如,磁性导引套筒55可以由相对较薄(2mm以下)的简单钢板件制成。
[0073]
这些尺寸考虑不仅适用于图1至图3中图示的第一实施方式,而且经过必要修改后也适用于下面描述的且在图5至图8中图示的第二实施方式至第四实施方式。
[0074]
图5中图示了磁性轴承装置的第二实施方式。具有与第一实施方式中的功能相同的功能的部件设置有与图1至图4中的附图标记相同的附图标记。与第一实施方式相比,在径向轴承绕组32与轴向轴承绕组41、42中的每一者之间轴向地设置有两个附加的磁性导引环53、54。以此方式,轴向轴承绕组41、42中的每一者轴向地夹在两个磁性导引环之间,所述两个磁性导引环又在其外圆周处通过磁性导引套筒55磁连接。附加的磁性导引环53、54具有以下效果:永磁场的磁通量分布在各个磁性导引环51、52、53和54上。磁通量在磁性导引环上的分布被轴向轴承绕组41、42中的电流改变,从而产生具有轴向分量的附加磁阻力。
[0075]
图6中图示了磁性轴承装置的第三实施方式。同样,具有与第一实施方式和第二实施方式中的功能相同的功能的部件设置有与图1至图5中的附图标记相同的附图标记。与第一实施方式和第二实施方式相比,在转子10与径向轴承绕组32之间的径向间隙中设置有单个在方位上卷绕的筒形轴向轴承绕组43。在图6中,轴向轴承绕组43以高度示意性的方式图示为在单个筒形层中具有少量匝数的螺线管。然而,应当理解的是,轴向轴承绕组43可以具有能够布置在多于一个筒形层中的任意的匝数。轴向轴承绕组43主要与磁性导引盘23和磁芯31之间的径向磁场分量相互作用。
[0076]
图7和图8中图示了磁性轴承装置的第四实施方式。该实施方式与图6中的第三实施方式相同,除了磁性导引套筒55被省去。由于磁芯31和磁性导引盘51、52的存在以及由于反向磁化的永磁体21、22和定子30相对于与旋转轴线r垂直的中央平面的镜像对称构型,磁性导引套筒55可以容易地被省去,因为杂散磁场通常会很小。通过省去磁性导引套筒55,可以另外简化磁性轴承装置的构造并且可以改善冷却。
[0077]
图9和图10中图示了磁性轴承装置的第五实施方式。在该实施方式中,存在两个环状磁芯31a、31b,并且在环状磁芯31a、31b中的每一者上设置有呈环形构型的多个径向磁性轴承绕组32a、32b。设置有两个在方位上卷绕的筒形轴向轴承绕组43a、43b,这些轴向轴承绕组中的每一者分别布置在转子10与一组径向轴承绕组32a、32b之间的径向间隙中。仅设置有单个永磁体24。永磁体24沿着旋转轴线r被磁化。在永磁体24的每个轴向端部上,设置有可选的磁性导引盘25、26。
[0078]
径向力以与上述第一实施方式类似的方式产生。例如,布置在相同的环状磁芯31a、31b上但在转子10的在直径上相对的径向侧部上的径向轴承绕组32a、32b与第一实施方式中的径向轴承绕组一样以具有相同大小但相反方向的电流进行操作。同样,布置在转子的相同径向侧部上但在不同环状磁芯31a、31b上的径向轴承绕组32a、32b以具有大小相同但方向相反的电流进行操作。
[0079]
应当注意的是,在环状芯31a、31b的外部流动的在径向轴承绕组32a、32b的每一匝
中的返回电流会产生相反取向的力,然而该力作用在芯31a与芯31b之间,因此不会对转子产生力。
[0080]
轴向力也以与上述第一实施方式类似的方式产生,除了电流被以相等的大小但相反的方向供应至轴向轴承绕组43a、43b。
[0081]
在变型中,轴向轴承绕组也可以如在第一实施方式中那样设置成在轴向上邻近于径向轴承绕组。
[0082]
现在将参照图11至图19对环形轴承绕组在环状磁芯上的可能布置以及环形轴承绕组之间的可能连接进行说明。
[0083]
图11以高度示意性的方式图示了布置在共同的环状磁芯31上的四个环形轴承绕组l1、l2、l3、l4的布置。第一轴承绕组l1的端子被指定为t1和t5;第二轴承绕组l2的端子被指定为t2和t6;第三轴承绕组l3的端子被指定为t3和t7;并且第四轴承绕组l4的端子被指定为t4和t8。环形轴承绕组l1和l3沿着y方向布置在转子的在直径上相对的侧部上,而环形轴承绕组l2和l4沿着x方向布置在转子的在直径上相对的侧部上。轴承绕组l1被供应有电流i1,轴承绕组l2被供应有电流i2,轴承绕组l3被供应有电流i3,并且轴承绕组l4被供应有电流i4。
[0084]
如上所述,为了产生沿着x方向的径向轴承力,轴承绕组l1和l3应当被供应有大小相等但方向相反的电流:i1 i3=0。同样,为了产生沿着y方向的径向轴承力,轴承绕组l2和l4应当被供应有大小相等但方向相反的电流:i2 i4=0。
[0085]
通过以反串联或反并联配置将环形轴承绕组连接在转子的在直径上相对的侧部上,可以容易地满足这些要求。这样的配置同时确保了环状磁芯内部的通量密度的沿着周向方向的积分始终是零,即,不存在沿着环状磁芯的净通量。这种净通量是不期望的,因为净通量将有助于环状芯的磁饱和,而不会有助于径向轴承力。
[0086]
图12中图示了呈反串联配置的连接。轴承绕组l1和l3以反串联配置连接以形成具有端子xp和xn的绕组对lx。流过该绕组对的电流被指定为ix,其中,ix=i1=-i3。同样,轴承绕组l2和l4以反串联配置连接以形成具有端子yp和yn的绕组对ly,并且供应至该绕组对的电流被指定为iy,其中,iy=i2=-i4。
[0087]
图13以高度示意性的方式图示了用于驱动绕组对lx和ly的放大器布置。绕组对lx以第一h桥配置与四个半导体开关s1连接,而绕组对ly以第二h桥配置连接。
[0088]
以反串联或反并联配置将成对的环形轴承绕组连接在转子的在直径上相对的侧部上的构思可以容易地推广到具有不同数目的环形轴承绕组的情况。图14以高度示意性的方式图示了六个环形轴承绕组l1、l2、l3、l4、l5和l6在共同的环状磁芯上的布置。第一轴承绕组l1的端子被指定为t1和t7;第二轴承绕组l2的端子被指定为t2和t8;第三轴承绕组l3的端子被指定为t3和t9;第四轴承绕组l4的端子被指定为t4和t10;第五轴承绕组l5的端子被指定为t5和t11;并且第六轴承绕组l6的端子被指定为t6和t12。
[0089]
为了产生沿着x方向的径向轴承力,可以向轴承绕组l1和l4供应大小相等但方向相反的电流。然而,供应至轴承绕组l2和l6的大小相等且方向相同的电流以及供应至轴承绕组l3和l5的大小相同但方向相反的电流也会产生沿着x方向的净轴承力。为了产生沿着y方向的径向轴承力,向轴承绕组l2和l3供应大小相等且方向相同的电流,而向轴承绕组l5和l6供应大小相等且方向相反的电流。本着相同的精神,径向轴承力可以沿着xy平面中的
任意横向方向而产生。
[0090]
图15中图示了连接轴承绕组l1至l6的便利的方式。布置在转子的在直径上相对的侧部上的成对的轴承绕组以反串联配置连接。所产生的三对lu、lv和lw以具有共同的星形点s的星形配置连接。因此,轴承线圈可以由具有相u、v、w的三相电流以与三相马达——三相马达的马达绕组以星形配置连接——类似的方式驱动。正交的x控制信号和y控制信号到用于相u、v和w的三相控制信号的对应的变换在本领域中是公知的(克拉克变换(clarke transform),例如参见https://wiki.openelectrical.org/index.php?title=clarke_transform,检索于2019年9月5日)。星形配置同时确保了通过对lu、lv、lw的电流总和始终为零。这是有利的,因为这些电流的非零总和将不会产生任何径向力并且将仅有助于环状磁芯的磁饱和。
[0091]
图16示出了替代性布置,在该替代性布置中,每对绕组中的两个绕组以反并联配置连接,而各对仍然以具有共同的星形点s的星形配置连接。
[0092]
如图17中所图示,代替以星形配置连接各对,还可以以三角形配置连接各对。
[0093]
图18图示了仅三个径向轴承绕组lu、lv和lw在共同的环状磁芯上的布置。与先前的示例一样,绕组以具有星形点s的星形配置连接并且可以由具有相u、v、w的三相电流驱动。
[0094]
图19图示了用于驱动三相配置中的绕组布置的可能的放大器布置。与三相马达中一样,相u由第一半桥电路驱动,相v由第二半桥电路驱动,并且相w由第三半桥电路驱动。这种放大器布置可以用于图15至图18的配置中的任何配置。
[0095]
从上面的描述中,对于本领域技术人员来说将容易明显的是,在不脱离本发明的范围的情况下,许多改型是可能的。特别地,除了上面的示例之外,还可以采用其他数目的径向轴承绕组。代替将永磁体和磁性导引盘安装在中空管中,也可以将这些元件安装在共同的中央杆上。磁性导引套筒在本发明的任何示例中均可以被省去。径向位移传感器和轴向位移传感器可以以与所述方式不同的方式配置并且可以位于与所示位置不同的位置。许多其他改型是可能的。
[0096]
附图标记列表
[0097]
10
–
转子
[0098]
11
–
中空管
[0099]
12
–
端板
[0100]
21、22、24
–
永磁体
[0101]
23、25、26
–
磁性导引盘
[0102]
30
–
定子
[0103]
31、31a、31b
–
环状芯
[0104]
32、32a、32b
–
径向轴承绕组
[0105]
33
–
内部轴向导体部分
[0106]
41、42、43、43a、43b
–
轴向轴承绕组
[0107]
50
–
壳体
[0108]
51、52、53、54
–
磁性导引环
[0109]
55
–
磁性导引套筒
[0110]
61
–
径向位移传感器
[0111]
62
–
轴向位移传感器
[0112]
70
–
控制器
[0113]
a—a
–
截面平面
[0114]b–
磁通量密度
[0115]f–
径向力
[0116]
i1、i2、i3、i4、ix、iy
–
电流
[0117]
l1、l2、l3、l4、l5、l6
–
径向轴承绕组
[0118]
lu、lv、lw
–
绕组对或单个径向轴承绕组
[0119]
lx、ly
–
绕组对
[0120]s–
星形点
[0121]
s1
–
半导体开关
[0122]
t1、t2、t3、t4、t5、t6、t7、t8、t9、t10、t11、t12
–
端子
[0123]r–
旋转轴线
[0124]
u、v、w
–
相
[0125]
x、y、z
–
方向
[0126]
xp、xn、yp、yn
–
端子
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。