1.本发明涉及光刻装置的控制方法、光刻装置以及物品制造方法。
背景技术:
2.在专利文献1中,公开了一种将任意的图案预先登记为标记,使用所登记的图案测量基板的位置的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2006-032521号公报
技术实现要素:
6.发明要解决的课题
7.在被登记为标记的图案的形状任意的情况下,根据其形状,由于测量系统的透镜像差的影响,测量精度可能降低。特别,在图案的形状相对于测量中心非对称地分布的情况下,受到由相对于测量中心以各向同性扩展的透镜像差引起的失真的影响。即,在图案的形状相对于测量中心非对称的情况下,在图案的一方的单侧产生的失真量和在另一方的单侧产生的失真量不同。因此,根据送入的图案的位置不同而图案失真的量发生变化,测量线性度(linearity)降低。另外,在可识别为标记的图案的信息量少的情况下,受到电气噪声等的影响,测量再现性以及测量线性度都降低。
8.本发明例如提供有利于提高基板的位置测量的精度的技术。
9.课题的解决手段
10.根据本发明的第1侧面,提供一种光刻装置的控制方法,其特征在于,具有:取得工序,由摄像部对基板的测量区域进行摄像而得到图像;计算工序,计算与得到的所述图像的熵有关的评价值;以及登记工序,在计算出的所述评价值满足预定的基准的情况下,将所述图像的信息登记为用于基板的位置测量的信息。
11.根据本发明的第2侧面,提供一种光刻装置,其特征在于,具有:保持部,保持基板;摄像部,对由所述保持部保持的所述基板的测量区域进行摄像;以及处理部,处理由所述摄像部得到的图像,所述处理部计算与所述图像的熵有关的评价值,在计算出的所述评价值满足预定的基准的情况下,将所述图像的信息登记为用于基板的位置测量的信息。
12.根据本发明的第3侧面,提供一种物品制造方法,其特征在于,具有:使用上述第2侧面所涉及的光刻装置在基板上形成图案的工序;以及进行形成有所述图案的所述基板的加工的工序,在所述物品制造方法中,从进行所述加工后的所述基板制造物品。
13.发明的效果
14.根据本发明,例如,能够提供有利于提高基板的位置测量的精度的技术。
附图说明
15.图1是示出曝光装置的结构的图。
16.图2是示出基板的布局的图。
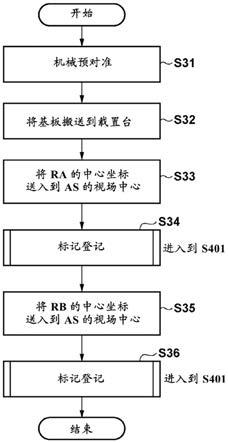
17.图3是标记登记处理的流程图。
18.图4是标记登记工序的流程图。
19.图5是熵评价值计算工序的流程图。
20.图6是示出图像的区域分割的例子的图。
21.图7是示出区域的向子区域的分割的例子的图。
22.图8是说明基板载置台的驱动量的决定工序的图。
23.图9是在本实施方式中使用的区域缩小布局图。
24.图10是标记登记工序的流程图。
25.图11是说明基于中间掩模(reticle)的设计区域的区域分割的例子的图。
26.(符号说明)
27.w:基板;r:中间掩模;ma:机械预对准单元;stg:基板载置台;ch:卡盘(chuck);as:对准观测器(alignment scope);ip:处理部;mc:控制部。
具体实施方式
28.以下,参照附图来详细说明实施方式。此外,权利要求书所涉及的发明不限于以下的实施方式。在实施方式中记载了多个特征,但并非所有这些多个特征都是发明所必须的,另外,多个特征也可以任意地组合。而且,在附图中,对相同或同样的结构附加相同附图标记,省略重复的说明。
29.本发明涉及在基板上形成原版的图案的光刻装置。以下,说明将本发明应用于作为光刻装置的一个例子的曝光装置的例子。但是,光刻装置不限于曝光装置,也可以是其他光刻装置。例如,光刻装置也可以是利用带电粒子线在基板(上的感光剂)上进行描绘的描绘装置。或者,光刻装置也可以是利用模对基板上的压印材料进行成形而在基板上形成图案的压印装置。
30.图1是示出实施方式所涉及的曝光装置的结构的图。另外,图2是示出由图1的曝光装置处理的基板w的布局的图。在图2中,在基板w上形成有矩阵状地排列的多个拍摄(shot)区域。在预定的1个拍摄区域中,形成有具有可登记为基板w的位置测量用的标记的图案的测量区域ra。另外,在预定的另外1个拍摄区域中,形成有具有可登记为基板w的位置测量用的标记的图案的测量区域rb。在基板w的外周部的一部分中,形成有在机械预对准中使用的缺口(notch)n。此外,也可以代替缺口n而形成定向平面(orientation flat)。
31.在图1中,中间掩模载置台rs是保持作为原版(掩模)的中间掩模r而移动的载置台。照明光学系统i对由中间掩模载置台rs保持的中间掩模r进行照明。在中间掩模r上,描绘有应转印到基板w的图案(例如电路图案)。投影光学系统p将中间掩模r的图案投影到基板w。
32.基板搬送部wf针对装置进行基板w的搬入及搬出。机械预对准单元ma进行检测基板w的缺口n并调整基板w的位置及旋转角中的至少一方的预对准。基板载置台stg是保持基板w而移动的保持部。在基板载置台stg上,设置有保持基板w的卡盘ch。对准观测器as可以
包括半反射镜(half mirror)m和摄像部c。来自照明部li的光被半反射镜m反射而对基板w进行照明。被基板w反射的光经由半反射镜m入射到摄像部c。摄像部c利用摄像元件捕捉入射的光来生成图像信号。图像信号被传送给处理部ip。
33.处理部ip根据由对准观测器as取得的图像,使用例如模板匹配(template matching)技术进行标记位置测量。处理部ip可以是包括未图示的cpu以及存储器mem1的计算机装置。控制部mc关于曝光处理总体地控制各部。例如,控制部mc根据来自处理部ip的位置测量信息,驱动基板载置台stg,进行基板w的对位,执行将中间掩模r的图案经由投影光学系统p对基板w进行曝光的曝光处理。控制部mc可以是包括未图示的cpu以及存储器mem2的计算机装置。此外,处理部ip和控制部mc也可以构成为独立的装置,处理部ip的功能和控制部mc的功能也可以由1个计算机装置实现。
34.参照图3~图5的流程图,说明实施方式中的标记登记处理。在s31中,基板w被基板搬送部wf搬入到曝光装置内,置于机械预对准单元ma上。机械预对准单元ma进行通过检测基板w的缺口n来调整基板w的位置或者旋转角的机械预对准。在s32中,由基板搬送部wf将基板w载置到基板载置台stg的卡盘ch上。卡盘ch例如通过真空吸引来保持所载置的基板w。
35.在s33中,控制部mc控制基板载置台stg,将基板w的测量区域ra的中心坐标送入到对准观测器as的视场中心。
36.在s34中,处理部ip执行标记登记工序。图4示出s34中的标记登记工序的详细流程图。在s401中,控制部mc使照明部li点亮而对基板w进行照明。由此,摄像部c能够对基板的测量区域ra进行摄像来得到图像(图案图像)。具体而言,被基板w反射的光入射到对准观测器as,经由半反射镜m到达摄像部c。摄像部c利用摄像元件捕捉入射的光,生成图案图像的图像信号。图像信号被传送给处理部ip,例如被存储到存储器mem1。
37.在s402中,处理部ip执行计算与得到的图像的熵有关的评价值的工序(计算工序)。在图5中示出了s402中的计算工序的详细流程图。在s51中,处理部ip设定图像的区域分割。在此,例如如图6所示,图像被分割成多个区域(例如4个区域)。但是,分割的区域的数量不限定于4个。
38.在此,示出在以后的工序中使用的公式的集合。其中,将区域i中的熵设为ei,将区域内的亮度值k的发生概率设为pk。
39.【数学1】
[0040][0041]esum
=e1 e2 e3 e4…
(2)
[0042]eave
=e
sum
/4
…
(3)
[0043][0044]esumtop
=e1 e2…
(5)
[0045]esumbot
=e3 e4…
(6)
[0046]esuml
=e1 e3…
(7)
[0047]esumr
=e2 e4…
(8)
[0048]ediff1
=|e
sumtop-e
sumbot
|
…
(9)
[0049]ediff2
=|e
suml-e
sumr
|
…
(10)
[0050]etotal
=(e
sum
)2 (1/e
var
)2 (1/e
diff1
)2 (1/e
diff2
)2…
(11)
[0051]
在s52中,处理部ip使用以上所示的式(1)以及式(2),求出表示各区域的图像的熵的总和的整体熵e
sum
。在此,如图6所示将图像分割为4个区域,所以i取1~4的值。另外,关于亮度值k,设想8位灰度而取0~255的值,但k的范围不限于此。整体熵e
sum
表示图像整体的信息量,e
sum
越大表示整体的信息量越多。
[0052]
在s53中,处理部ip使用式(1)求出每个区域的图像熵ei。在s54中,处理部ip使用式(3)、式(4)求出表示各区域的图像的熵的方差的熵方差值e
var
。熵方差值e
var
表示在图像中示出的图案的分布的偏差,熵方差值e
var
越小表示图案的分布越均等(无偏差)。
[0053]
在s55及s56中,处理部ip求出多个区域中的相对于图像的中心处于对称的位置的区域的图像的熵的差分。例如,在s55中,处理部ip使用式(5)、式(6)、式(9)求出上侧区域(图6的区域1、2)和下侧区域(图6的区域3、4)的熵差分值e
diff1
。熵差分值e
diff1
越小,上侧区域和下侧区域的图案的对称性越高。在s56中,处理部ip使用式(7)、式(8)、式(10)求出左侧区域(图6的区域1、3)和右侧区域(图6的区域2、4)的熵差分值e
diff2
。熵差分值e
diff2
越小,左侧区域和右侧区域的图案的对称性越高。
[0054]
在s57中,处理部ip通过将在s52~s56中计算出的整体熵e
sum
、熵方差值e
var
、熵差分值e
diff1
及e
diff2
应用于式(11),求出熵评价值e
total
。作为评价式的式(11)的右边第1项表示整体熵e
sum
越高则评价值越提高。如上所述,整体熵e
sum
表示图案图像整体的信息量。信息量越多则测量精度越提高(等价于标记的个数越多),所以整体熵e
sum
越高则评价值越提高。式(11)的右边第2项表示熵方差值e
var
越小则评价值越提高。熵方差值e
var
越小,图案的分布越均等(无偏差),测量系统的像差的影响越小。式(11)的右边第3项及第4项分别表示熵差分值e
diff1
及e
diff2
越小则图案的对称性越高,评价值提高。
[0055]
根据以上,s402中的子过程完成。
[0056]
返回到图4,在s403中,处理部ip判定在s402中计算出的熵评价值e
total
是否满足预定的基准。例如,处理部ip判定在s402中计算出的熵评价值e
total
是否为预定的阈值以上。在熵评价值e
total
为阈值以上的情况下,处理部ip进入到s404,将在s401中得到的图像的信息登记为用于基板的位置测量的信息。“图像的信息”既可以是图像本身,也可以是图像的特征量。另外,在图像的信息中也可以包括基板中的该图像的位置的信息。在此,处理部ip将在s401中得到的图像登记为基板上的测量区域ra的标记图像。登记的图像例如被存储到控制部mc的存储器mem2。
[0057]
返回到图3,在s35中,控制部mc控制基板载置台stg,将基板w的测量区域rb的中心坐标送入到对准观测器as的视场中心。之后,在s36中,执行针对测量区域rb的标记登记工序。该标记登记工序是与上述s34的标记登记工序同样的处理,所以省略说明。
[0058]
接下来,说明在图4的s403中判定熵评价值e
total
并非阈值以上(即,不满足预定的基准)的情况。在该情况下,处理进入到s405。在s405中,处理部ip将图6的区域1如图7所示进一步分割为4个子区域1-1、1-2、1-3、1-4,依照图5的流程图计算各子区域的图像的熵,求
出区域1的熵评价值。此外,在图7的例子中将各区域进一步分割为4个子区域,但分割数不限于此。之后,在s406、s407、s408中,处理部ip针对区域2、3、4也同样地求出熵评价值。
[0059]
在s409中,控制部mc根据在s405~s408中求出的熵评价值,决定基板载置台stg的驱动量。例如,控制部mc选择在s405~s408中求出的熵评价值最大的区域。在图8中示出了与图7对应的图像的分割布局。在图8中,将图像的横向的像素数设为xpix,将纵向的像素数设为ypix。在此,作为一个例子,设想图6的区域4的熵评价值最大的情况。在该情况下,在图8中,用于将区域4的中心ofs送入到图像中心org(对准观测器as(摄像部c)的视场中心)的驱动量能够设为δ(1/4)xpix、δ(1/4)ypix。
[0060]
在s410中,控制部mc以在s409中决定的驱动量驱动基板载置台stg。这样,以使熵评价值最大的区域的中心位于摄像部c的视场中心的方式调整基板载置台stg的位置。
[0061]
之后,处理返回到s401,再次以同样的工序进行标记图像登记。由此,能够决定使熵评价值最大化的图像的区域。
[0062]
《第2实施方式》
[0063]
在上述第1实施方式中,在图4中示出了图3的标记登记工序(s34、s36)的详细流程,在图10中示出图4的代替例。
[0064]
图10的s1001、s1002、s1003、s1004分别与图4的s401、s402、s403、s404相同。在图10中,在s1003中判定熵评价值e
total
并非阈值以上的情况下,处理进入到s1005。在s1005中,处理部ip将求出熵评价值e
total
的对象区域如图9所示变更为原始的图像的区域oar的部分区域mar。之后,处理返回到s1002。在s1002中,处理部ip依照图5的流程,针对部分区域mar中的区域1~4求出熵评价值。之后,在s403中,如果该熵评价值成为阈值以上,则在s404中将部分区域mar的图像登记为标记图像。登记的图像例如被存储到控制部mc的存储器mem2。
[0065]
《第3实施方式》
[0066]
在图11中,示出中间掩模r内的形成有应被曝光到基板的电路图案等图案的设计区域。在此,将中间掩模r的设计区域的x方向的尺寸设为rxnm,将y方向的尺寸设为rynm,将由摄像部c摄像的图像的x方向的尺寸设为xnm、ynm。处理部ip将中间掩模r的设计区域分割为各自与图像的尺寸xnm、ynm相同或者比其小的多个区域,在各个分割区域中计算熵评价值。之后,处理部ip根据计算出的各区域的熵评价值,求出设计区域中的要形成可登记为标记的图案的位置。例如,处理部ip针对各分割区域判定熵评价值是否为阈值以上。在熵评价值为阈值以上的情况下,该分割区域是中间掩模r的设计区域中的适合于测量的区域,判断为是适合于可登记为标记的图案的形成的区域。
[0067]
由此,能够预先求出中间掩模r的设计区域上的适合于测量的位置(适合于形成可登记为标记的图案的位置)。
[0068]
《物品制造方法的实施方式》
[0069]
本发明的实施方式中的物品制造方法例如适合于制造半导体设备等微型设备、具有微细构造的元件等物品。本实施方式的物品制造方法包括使用上述光刻装置(曝光装置、压印装置、描绘装置等)将原版的图案转印到基板的工序以及加工在上述工序中转印有图案的基板的工序。而且,上述制造方法包括其他公知的工序(氧化、成膜、蒸镀、掺杂、平坦化、蚀刻、抗蚀剂剥离、切割、粘合、封装等)。本实施方式的物品制造方法相比于以往的方法,在物品的性能、质量、生产率、生产成本中的至少1个方面更有利。
[0070]
发明不限制于上述实施方式,能够不脱离发明的精神以及范围而进行各种变更以及变形。因此,为了公开发明的范围而添附权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。