1.本发明涉及一种自动扶梯。
背景技术:
2.自动扶梯是一种移动台阶形式的垂直运输设备,即用于在建筑物的楼层之间运送人员的传送器运输设备。该设备由单独链接的梯级的电机驱动链条组成,这些梯级在轨道上上下移动,允许梯级踏板保持水平。梯级在自动扶梯的运输侧向上和/或向下移动,并且在自动扶梯的返回侧返回。
3.自动扶梯可以包括层站平台、桁架、轨道、梯级和栏杆。
4.层站平台容纳了轨道的弯曲部段,以及驱动台阶的齿轮和电机。顶部平台包含电机组件和主驱动齿轮,而底部平台则装有返回齿轮。这些部段还固定了自动扶梯桁架的端部。此外,平台包含底板和梳状板。底板为乘客在踏上移动台阶之前提供了站立的地方。底板与完成的地板齐平,可以铰接或可拆卸,以允许轻松接触下面的机器。梳状板是固定底板和移动台阶之间的部件。它之所以如此命名,是因为它的边缘有一系列类似于梳子齿的夹板。这些齿与梯级边缘的配合夹板啮合。这种设计对于减少台阶和平台之间的间隙是必要的,这有助于防止物体被夹在间隙中。
5.桁架可以由桥接下平台和上平台的中空金属结构形成。它可由两个侧面部段组成,并在底部和顶部下方用横撑连接在一起。桁架的端部可以通过钢或混凝土支撑件附接到顶部和底部层站平台。桁架承载着连接上下部段的所有直线轨道部段。
6.轨道系统可以内置在桁架中以引导梯级和链条,链条不断地将梯级从底部平台拉回顶部平台,以无限循环。梯级可以由各自对轨道上的两对轮子支撑。两对轮子中的轮子之间的轴向距离以及因此两对轨道之间的轴向距离可以不同。两对轨道的相对位置使得梯级在从梳状板下方移出时形成阶梯。沿着桁架的倾斜部段,轨道之间的距离最大。这种配置使梯级踏板在自动扶梯上始终保持水平,从而梯级类似于自动扶梯倾斜部段上的台阶。在自动扶梯的顶部和底部,两条轨道汇合,使两对轮子几乎在直线上。这导致台阶以平板状布置,一个接一个,因此它们可以轻松地绕过轨道弯曲部段的弯道。轨道沿着桁架的下侧将梯级向下移动,直到它们到达底部平台,在那里它们在离开底部平台之前穿过轨道的另一弯曲部段。在此处轨道分开,梯级再次呈现台阶结构。随着梯级从底部被拉到顶部并再次拉回到底部,这个循环不断重复。轨道系统包括运输侧的运输导轨和自动扶梯返回侧的返回导轨。
7.梯级本身是实心的、一体成型的、压铸的铝或钢。在大多数自动扶梯型号中,每个梯级的挡步板和踏板都装有防滑纹,即具有棱纹外观,带有梳状突起,与顶部和底部平台上的梳状板以及链条中的后续梯级啮合。这些梯级由形成闭环的至少一个连续金属链连接。梯级可由两对轮子支撑。与另一对轮子相比,一对轮子中的轮子在轴向方向上设置得更远。
8.栏杆可以定位在梯级的相对横向侧。栏杆可以包括支撑在桁架上的基部、从基部向上延伸的栏杆面板、以及支撑在栏杆面板的上边缘上的移动扶手。栏杆的基部可以覆盖
有位于梯级附近并平行于梯级延伸的裙板。裙板与梯级的垂直侧表面之间形成间隙。扶手为乘坐自动扶梯的乘客提供方便的把手。扶手由链条沿着它们的轨道拉动,链条可以通过一系列滑轮连接到主驱动齿轮。
9.桁架通常由分包商制造。桁架的尺寸可能存在小错误,并且桁架在自动扶梯的纵向方向上可能不太直。在自动扶梯工厂将电机、驱动机构和其他设备安装到桁架中可能会导致桁架的尺寸和直线度进一步变形。在现场安装自动扶梯也可能导致桁架的尺寸和直线度进一步变形。
10.在过程的每个连续阶段中尝试修复先前对桁架造成的扭曲和损坏是昂贵且耗时的。
11.jps58192867u公开了一种设有外部结构的自动扶梯。
12.us2001/0025763公开了一种设有底部观察板的自动扶梯。
13.jp2909896b1公开了一种设有侧部外部结构的自动扶梯,该侧部外部结构可以容易地附接到自动扶梯中的桁架。
14.jp2004137014a公开了一种自动扶梯,该自动扶梯在桁架上设有钩状构件,并且在侧板和底板中设有用于附接到钩状构件的构件。
技术实现要素:
15.本发明的目的是实现一种改进的自动扶梯。
16.根据本发明的自动扶梯在权利要求1中定义。
17.自动扶梯包括由支撑结构形成的桁架,该支撑结构桥接自动扶梯的下平台和上平台,桁架包括从桁架的底平面向上的两个上升侧部,侧部沿桁架的长度延伸并且通过横撑连接在一起。
18.自动扶梯还包括子框架,子框架附接到桁架的至少一个侧部的外侧,子框架布置成接收自动扶梯的外包层。子框架由布置成格子结构的梁形成。
19.单独的子框架附接到桁架的侧部,解决了桁架尺寸的小错误和桁架不直的问题。
20.单独的子框架为自动扶梯的外包层形成了高质量的支撑结构。子框架的使用导致外包层的无瑕疵和直线安装。子框架的使用还将导致自动扶梯的无螺丝视觉外观。
21.如果需要,使用子框架还可以轻松更换包层板。磨损或损坏的包层板可以随时轻松更换。
附图说明
22.下面将参考附图通过优选实施例更详细地描述本发明,其中:
23.图1示出了自动扶梯的示意性侧视图,
24.图2示出了自动扶梯的示意性垂直截面,
25.图3示出了自动扶梯桁架的示意性等距视图,
26.图4是桁架的侧视图,
27.图5示出了自动扶梯子框架的侧视图,
28.图6示出了带有包层的自动扶梯的侧视图,
29.图7示出了自动扶梯一侧的横截面图,
30.图8示出了子框架上部紧固到桁架的等距视图,
31.图9示出了子框架下部紧固到桁架的等距视图,
32.图10示出了自动扶梯的拱腹板的等距视图,
33.图11示出了拱腹板附接到子框架的等距视图,
34.图12示出了将包层板附接到子框架的等距视图,
35.图13示出了拱腹板和附接到子框架的包层板的等距视图。
具体实施方式
36.图1示出了自动扶梯的示意性侧视图。
37.自动扶梯1连接下平面e1和上平面e2。桁架10在上平面e2和下平面e1之间形成自动扶梯1的负载支撑框架。图3中更详细地展示了桁架10。在围绕驱动辊2和返回辊3的闭环中移动的连续梯级20的循环构造可以定位在桁架10中。驱动辊2可以位于自动扶梯的上端,返回辊3可位于自动扶梯的下端。闭环因此可以在上平面e2和下平面e1中偏转。栏杆30可以沿着梯级带20的每个纵向侧延伸。可以在每个栏杆30处布置活动扶手32,其中扶手的返回段布置在连接栏杆30与桁架10的栏杆基部31中。桁架10的至少一侧可以用若干包层部件40包覆。包层部件40可以在高度上延伸到桁架10和栏杆基部31上方,并且可以由钢板制成。栏杆30可以包括在基部31和扶手32之间的支撑结构。支撑结构可以覆盖有包层板。另一方面,支撑结构可以由在基部31和扶手32之间延伸的栏杆面板形成。栏杆面板可以是透明的,例如由玻璃制成。
38.图中还标出了自动扶梯的长度方向z。长度方向z在自动扶梯的下平面e1和上平面e2上是水平的。长度方向z与扶梯倾斜部分的水平面形成第一夹角α1。
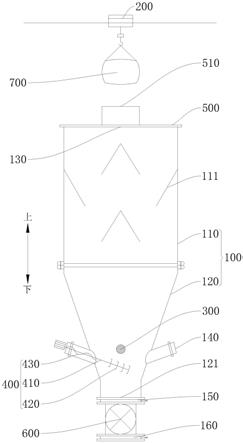
39.图2示出了自动扶梯的示意性垂直截面。
40.横向方向x,即梯级20的宽度方向,以及高度方向y,即垂直方向,如图所示。自动扶梯可以具有运输侧ts和返回侧rs。该图的上部示出了自动扶梯的运输侧ts中的梯级20。梯级20的梯级踏板21在自动扶梯的运输侧ts中面向上。该图的下部示出了在自动扶梯的返回侧rs中的梯级20。梯级20是悬挂的,即在自动扶梯的返回侧rs中梯级踏板21朝下。梯级20被传送回到自动扶梯的返回侧rs中的运输侧ts的起点。梯级20可以在自动扶梯的运输侧向上或向下移动。因此可以在自动扶梯的运输侧ts中向上和/或向下运输人员。根据需要,自动扶梯可以被配置为仅在一个方向上运行,或者自动扶梯可以被配置为在两个方向上运行。
41.自动扶梯可以包括水平顶部平台、水平底部平台和在顶部平台和底部平台之间延伸的倾斜部分。
42.每个梯级20可以设置有两对辊子。第一对辊子22可以设置在梯级20的第一边缘上。第一对辊子中的每个辊子22设置在梯级20的相应侧上。第二对辊子23可以设置在梯级20的第二边缘上。第二对辊子中的每个辊子23设置在梯级20的相应侧上。第一对辊子22中的辊子22之间的轴向距离可以小于第二对辊子23中的辊子23之间的轴向距离。第一对辊子22中的辊子22和第二对辊子中的辊子23可以通过轴可旋转地支撑在梯级20的支撑框架上。梯级20的第一边缘可以是梯级20的面向自动扶梯上端的边缘,梯级20的第二边缘可以是当梯级20在自动扶梯的运输侧ts向上移动时朝向自动扶梯底端的边缘。梯级20可以在自动扶梯的运输侧ts上向上或向下移动。
43.自动扶梯可以在自动扶梯的运输侧ts中设置有用于第一对辊子22的第一对运输导轨22a,并且在自动扶梯的运输侧ts中设置有用于第二对辊子23的第二对运输导轨23a。
44.自动扶梯还可以在自动扶梯的返回侧rs中设置有用于第一对辊子22的第一对返回导轨22b,并且在自动扶梯的返回侧rs上设置有用于第二对辊子23的第二对返回导轨23b。
45.第一对辊子22和第二对辊子23在自动扶梯的运输侧ts上的相应运输导轨22a、23a的上支撑表面上运行。因此,作用在梯级20的踏板21上的力将通过辊子22、23分配到相应的运输导轨22a、23a。
46.从在自动扶梯的返回侧rs上的相应返回导轨22b、23b上运行的第一对辊子22和第二对辊子23,梯级20被支撑在悬挂位置。返回导轨22b、23b只需支撑梯级20的重量。
47.第一辊子22的轴可以仅在梯级的一个轴向侧或在梯级20的两个轴向侧附接到链条。梯级20一侧的链条或梯级20每一侧的链条可以形成循环回路,该循环回路在自动扶梯上层的驱动辊上和自动扶梯下层的返回辊上运行。链条可以在链条与梯级20的辊子22的附接点之间的链条回路中设置有一个或多个链条轮。链条轮可以在相同的导轨22a、23a上滚动。驱动辊可以被直接驱动或由驱动电机通过传动装置驱动。电动驱动电机可以由转换器控制。电动驱动电机的旋转速度和旋转方向可以由转换器控制。
48.运输导轨22a、23a和返回导轨22b、23b可以用支撑托架以可变间隔支撑到自动扶梯的桁架10。运输导轨22a、23a和返回导轨21b、23b可以由冷轧钢通过轧制弯曲、拉拔或一些其他适合的方法制造,以制造长的、重量轻的金属结构。
49.栏杆30可以由基部31、支撑在基部31上的栏杆面板50和可移动地支撑在栏杆面板50的上边缘上的扶手32形成。栏杆面板50的下端可以支撑在布置在栏杆30的基部31中的狭缝60中。栏杆面板50可以由沿着自动扶梯的纵向方向首尾相连的若干连续栏杆面板50形成。栏杆面板50可以是透明的,例如由玻璃制成。
50.栏杆30的基部31可以覆盖有内盖板310、裙板320和外盖板200。
51.裙板320可以定位成与梯级20的垂直侧平面25相距水平距离。裙板310可以与梯级20的垂直侧平面25平行。裙板320可以是基本上垂直的。因此可以在裙板320和梯级20的垂直侧平面25之间形成间隙g1。安全规定决定了这个间隙g1的最大水平宽度。梯级20的垂直侧平面25在自动扶梯的纵向方向z上在梯级25的垂直侧表面上延伸。裙板320的下端可以位于梯级20的踏板21下方的垂直距离处,裙板320的上端可以位于梯级20的踏板21上方的垂直距离处。
52.内盖板310可以倾斜地从裙板320的上端朝向栏杆面板50延伸。内盖板310的上端可以在距栏杆面板50的水平距离处延伸。
53.图中所示的栏杆30为低台栏杆(low deck balustrade)。栏杆的基部31较低,栏杆面板50形成了支撑扶手32的栏杆30的支撑结构。
54.图3示出了自动扶梯的桁架的示意性等距视图,图4示出了桁架的侧视图。
55.桁架10可由桥接自动扶梯的下平台e1和上平台e2的支撑结构形成。桁架10可以包括水平下部10a、水平上部10b以及在下部10a和上部10b之间延伸的倾斜中间部10c。桁架10可以包括两个从桁架10的底平面11向上的上升侧部12、13。桁架10的侧部12、13可以在桁架10的纵向方向z上延伸。桁架10的侧部12、13可以用横撑14连接在一起。
56.桁架10的侧部12、13可以由纵向下支撑梁12a、纵向上支撑梁12b以及在下支撑梁12a和上支撑梁12b之间延伸的横梁12c形成。
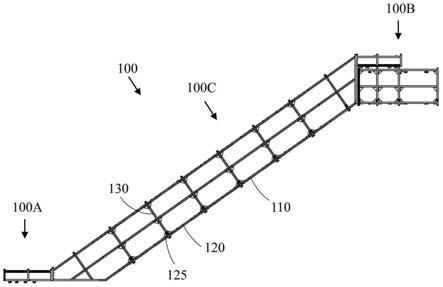
57.图5示出了自动扶梯子框架的侧视图。
58.子框架100可以由附接到桁架10的侧部12、13的单独部件形成。子框架100可以位于桁架10的侧部12、13的外表面上。子框架100和桁架10的侧部12、13之间的附接可以是可调节的。当子框架100附接到桁架10的侧部12、13时,子框架100相对于桁架10的侧部12、13的位置可以因此被调整。在包层40已经附接到子框架100之后,可调节的子框架100使得可以实现自动扶梯的笔直、垂直和视觉上无螺纹的外观。因此不需要试图通过修改这样的桁架10来修正桁架10中可能存在的缺陷。桁架100中可能存在的缺陷将通过调整桁架10上的子框架100的位置来修正。子框架100可以在自动扶梯的现场处附接到桁架10。
59.子框架100可以包括在桁架10的侧部12、13的一侧上延伸的侧部110。子框架100的侧部110可以由布置成格子结构的梁120、130形成。侧部可以包括纵梁120和横梁130。纵梁120可以在自动扶梯的纵向方向z上延伸。横梁130可以垂直于纵梁120。纵梁120可以通过位于纵梁120和横梁130之间的交叉处的凸缘125附接到横梁130。子框架100可以在桁架10和包层板40之间形成索具网格(rigging grid)。
60.子框架100可以由模块形成。子框架100可以包括三个模块,在下平台e1上延伸的下模块100a、在上平台e2上延伸的上模块100b、以及在下模块100a和上模块100b之间延伸的中间模块100c。下模块100a可以定位在桁架10的下部10a上。上模块100b可以定位在桁架10的上部10b上。中间模块100c可以定位在桁架10的中间部分10c上。下模块100a和上模块100b可以基本水平。中间模块100c可以是倾斜的。中间模块100c可以进一步划分为子模块。
61.子框架100中的梁120、130的尺寸可以设计为仅支撑子框架100、包层40和拱腹板400的重量。
62.图6示出了带有包层的自动扶梯的侧视图。
63.扶梯侧面的包层板40和扶梯下角的拱腹板400已经安装在子框架100的外表面上。由于子框架100的使用,可以将自动扶梯的视觉外观提升到新的更高水平。
64.图7示出了自动扶梯一侧的横截面图。
65.子框架100可以在定位成与子框架100的上部连接的第一紧固装置f1处和定位成与子框架100的下部连接的第二紧固装置f2处附接到桁架10。第一紧固装置f1和第二紧固装置f2可以沿着子框架100的纵向方向z以合适的间隔布置。每个紧固装置f1、f2可以包括附接到子框架100的凸缘150。凸缘150可以从子框架100朝向桁架10向外延伸。凸缘150可以基本沿水平方向x延伸。凸缘150的内端可以附接到子框架100。可以使用合适的紧固器件将凸缘150和子框架100连接到桁架10。紧固器件可以布置成使得子框架100相对于桁架10的位置可被调节。包层40和拱腹板400可以附接到子框架100的外表面。子框架100的纵向方向z延伸到图中的纸中。
66.图8示出了子框架上部紧固到桁架的等距视图。
67.子框架100可以通过第一紧固装置f1附接到桁架10。第一紧固装置f1可以位于子框架100的上部。第一紧固装置f1可以沿着子框架100的纵向方向z以特定间隔分布。第一c型材170可以附接到桁架10中的上纵向支撑梁12b。第一c型材170可以附接到桁架10中的上纵向支撑梁12b的上表面。凸缘150可以设有两个开口155。开口155在水平方向x上可以是长
圆形的。凸缘150可以用穿过开口155的螺栓160和螺母165附接到第一c型材170。因此可以调整子框架100相对于桁架10的位置。
68.当螺栓160被拧紧时,凸缘150锁定到第一c型材170。螺母165可由外壳螺母(house nut)形成。外壳螺母可定位在第一c型材170内。外壳螺母可以具有带宽度和长度的矩形头部。外壳螺母可以定位在第一c型材170中,使得外壳螺母的长度沿着第一c型材170中的狭缝延伸。将外壳螺母旋转90度导致外壳螺母被支撑在第一c型材170内。现在拧紧螺栓160会将凸缘150锁定到第一c型材170。
69.子框架100因此可定位在桁架10的外侧,使得子框架100在子框架100的纵向方向上是竖直且笔直的,而不管桁架10中可能存在的缺陷。
70.包层40可以用钩状紧固构件45附接到子框架100。
71.图9示出了子框架下部紧固到桁架的等距视图。
72.子框架100可以通过第二紧固装置f2附接到桁架10。第二紧固装置f2可以位于子框架100的下部。第二紧固装置f2可以沿着子框架100的纵向方向z以特定间隔分布。凸缘150可以用两个螺栓160和螺母165附接到第二c型材175。第二c型材175可以附接到桁架10的下纵向支撑梁12a。第二c型材175可以附接到桁架10中的下纵向支撑梁12a的下表面。凸缘150可以设有开口。开口在水平方向x上可以是长圆形的。因此可以调节子框架相对于桁架10的位置。
73.当螺栓160被拧紧时,凸缘150锁定到第二c型材175。螺栓160的头部可以定位在第二c型材175内。螺栓160的头部可以包括具有宽度和长度的矩形部分。螺栓160的头部可以定位在第二c型材175中,使得螺栓160的头部的长度沿着第二c型材175中的狭缝延伸。将螺栓160的头部转动90度导致螺栓160的头部被支撑在第二c型材175内。现在拧紧螺栓160会将凸缘150锁定到第二c型材175。
74.子框架100因此可定位在桁架10的外侧,使得子框架100在子框架100的纵向方向上是竖直且笔直的,而不管桁架10中可能存在的缺陷。
75.拱腹板400可以通过紧固构件附接到子框架100。当要在子框架100上安装垂直成排的包层板40时,拱腹板400可以形成起点。拱腹板400可以具有字母l的形式,其中拱腹板400的第一部分沿着子框架100的侧面延伸,并且拱腹板400的第二部分沿着桁架10的底部延伸。包层板40的下边缘然后可以安装在形成在拱腹板400的上边缘中的连接部分410上。
76.图10示出了自动扶梯的拱腹板的等距视图。
77.拱腹板400可以包括位于l形拱腹板400的两个外端处的连接部分410。拱腹板400还可包括用于将拱腹板400附接到子框架100的紧固构件420。紧固构件420可以具有钩子的形状。
78.图11示出了拱腹板附接到子框架的等距视图。
79.拱腹板400可以通过具有钩子形状的紧固构件420附接到销180,销附接到子框架100。销180可以从子框架100向外延伸。销180可以在子框架100的纵向方向上延伸。
80.图12示出了将包层板附接到子框架的等距视图,图13示出了拱腹板和附接到子框架的包层板的等距视图。
81.包层板40可以通过紧固构件45附接到子框架100的纵梁120。紧固构件45可以具有钩子的形状。紧固构件45可以以合适的方式附接到包层板40。当包层板40被提升到位时,紧
固构件45可以夹紧在纵梁120上。
82.凸缘125将子框架100中的纵梁120和横梁130彼此附接。
83.凸缘150可以附接到子框架100中的纵梁120的下边缘。
84.包层板40可以附接到子框架100的纵梁120,并且拱腹板400可以附接到销180,销附接到子框架100。
85.第一c型材170和第二c型材175可以用任何合适的附接器件附接到桁架10。一种可能的紧固方式是焊接。凸缘150和销180可以用任何合适的附接器件附接到子框架100。一种可能的紧固方式是焊接。
86.这些图示出了子框架100上的两排叠置的包层板40。这是有利的实施例。然而,包层可由任意数量的包层板40的排形成。包层板40当然也可以形成任何图案。
87.本发明的用途不限于附图中公开的自动扶梯。本发明可用于任何类型的自动扶梯。
88.对于本领域技术人员而言显而易见的是,随着技术的进步,可以以各种方式来实现本发明构思。本发明及其实施例不限于上述示例,而是可以在权利要求的范围内变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。