技术特征:
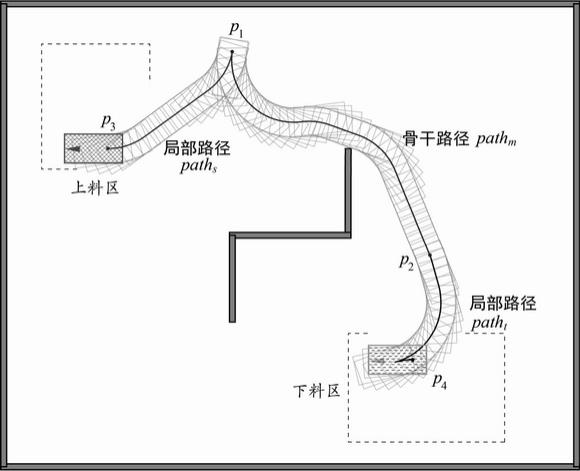
1.一种移动机器人全局路径规划方法,其特征在于,所述规划方法包括以下步骤:步骤1,根据起始点和目标点,以及障碍物分布,规划出移动机器人的完整可行路径;步骤2,从所述可行路径中,去除与起始点和目标点之间距离小于设定长度d0的点,形成一段包含新的起点和新的终点的骨干路径,以所述骨干路径的起点和终点作为索引存储在数据库中;步骤3,再次规划时根据新任务的起始点和目标点检索数据库,提取对应的最近骨干路径;步骤4,使用局部路径规划方法将新的起始点和目标点连接到骨干路径,得到最终的可行路径。2.根据权利要求1所述的一种移动机器人全局路径规划方法,其特征在于,所述设定长度d0根据移动机器人的最小转向半径r
min
确定,具体为2r
min
< d0<4r
min
。3.根据权利要求1所述的一种移动机器人全局路径规划方法,其特征在于,所述步骤1中,采用混合a*算法规划出移动机器人的完整可行路径。4.根据权利要求1所述的一种移动机器人全局路径规划方法,其特征在于,所述步骤3中,所述对应的骨干路径根据以下方式得到:所述新任务起始点与骨干路径起点之间距离,与新任务目标点与骨干路径终点之间距离之和最小,该骨干路径为所述新任务对应的骨干路径。5.根据权利要求4所述的一种移动机器人全局路径规划方法,其特征在于,所述步骤3中,如果移动机器人为类车机器人,采用reeds-shepp曲线长度作为距离度量;如果机器人为全向移动机器人,采用欧式距离度量。6.根据权利要求4所述的一种移动机器人全局路径规划方法,其特征在于,所述步骤4中,利用混合a*算法连接新任务的起始点和骨干路径的起点;利用混合a*算法连接骨干路径的终点和新任务的目标点;再将三段路径拼接为一段完整路径,作为满足避障和移动机器人运动约束的全局路径。
技术总结
本发明公开了一种利用记忆提高规划效率的移动机器人全局路径规划方法。该方法首先使用传统路径规划方法生成一系列可行路径,随后对完整路径进行分割并提取出骨干路径。以骨干路径的起点和终点作为索引,将骨干路径存储在数据库中。在后续需要路径规划时根据起点和终点从数据库中提取出最近的骨干路径并与局部规划的路径拼接即可快速得到可行的完整路径。该方法利用历史规划结果避免重复计算,提高路径搜索效率和路径质量。径搜索效率和路径质量。径搜索效率和路径质量。
技术研发人员:胡亚南 明瑞浩 韩国庆 杨佳 陆飞宇 于洋
受保护的技术使用者:江苏金陵智造研究院有限公司
技术研发日:2021.11.26
技术公布日:2022/3/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。