1.本技术涉及到净化收尘领域,具体而言,涉及一种智能化集中收尘方法和装置。
背景技术:
2.在物料的破碎、筛分、贮存、输送、生产工艺过程中,常常存在粉料泄漏、洒落、流散到地面/楼面的现象,因而需要进行洒落物料的集中收集处理,既能将洒落各地的物料回收利用,又能避免污染环境。
3.目前在现有技术中逐渐采用真空抽吸系统完成各处物料的收集,但自动化程度低,常需人工巡检现场、操作终端,劳动强度较大,收尘效率较低。
技术实现要素:
4.本技术实施例提供了一种智能化集中收尘方法和装置,以至少解决现有技术中需要人工巡检操作终端所导致的收尘劳动强度较大效率较低的问题。
5.根据本技术的一个方面,提供了一种智能化集中收尘方法,包括:通过摄像机对巡检区域进行扫描得到多张照片;对所述多张照片进行识别,得到所述多张照片中需收尘的至少一张第一照片;获取所述至少一张第一照片所在的子区域,其中,所述巡检区域包括至少一个子区域;发送命令,其中,所述命令用于指示对所述至少一张第一照片所在的子区域进行收尘。
6.进一步地,在发送所述命令之前,还包括:获取所述至少一张第一照片所在的子区域在所述巡检区域中的位置;根据所述位置进行路径规划,得到收尘路径,其中,所述收尘路径经过所有所述至少一张第一照片所在的子区域。
7.进一步地,所述收尘路径还包括完成所述至少一张第一照片所在的子区域范围内粉尘收集而需经过的所有路径。
8.进一步地,发送所述命令包括:将所述收尘路径携带在所述命令中,发送携带有所述收尘路径的所述命令。
9.进一步地,对所述多张照片进行识别包括:对所述多张照片中的每张照片进行识别,在某张照片中的粉尘到达预先设置的阈值的情况下,确定该照片为所述第一照片。
10.进一步地,通过摄像机对巡检区域进行扫描包括:获取预先配置的巡检间隔;根据所述巡检间隔调用所述摄像机对巡检区域进行扫描。
11.根据本技术的另一个方面,还提供了一种智能化集中收尘装置,包括:扫描模块,用于通过摄像机对巡检区域进行扫描得到多张照片;识别模块,用于对所述多张照片进行识别,得到所述多张照片中需收尘区域的至少一张第一照片;获取模块,用于获取所述至少一张第一照片所在的子区域,其中,所述巡检区域包括至少一个子区域;发送模块,用于发送命令,其中,所述命令用于指示对所述至少一张第一照片所在的子区域进行收尘。
12.进一步地,在发送所述命令之前,所述获取模块还用于:获取所述至少一张第一照片所在的子区域在所述巡检区域中的位置;根据所述位置进行路径规划,得到收尘路径,所
述收尘路径经过所有所述至少一张第一照片所在的子区域。
13.进一步地,所述收尘路径还包括完成所述至少一张第一照片所在的子区域范围内粉尘收集而需经过的所有路径。
14.进一步地,所述发送模块用于:将所述收尘路径携带在所述命令中,发送携带有所述收尘路径的所述命令。
15.进一步地,所述识别模块用于:对所述多张照片中的每张照片进行识别,在某张照片中的粉尘到达预先设置的阈值的情况下,确定该照片为所述第一照片。
16.进一步地,所述扫描模块用于:获取预先配置的巡检间隔;根据所述巡检间隔调用所述摄像机对巡检区域进行扫描。
17.在本技术实施例中,采用了通过摄像机对巡检区域进行扫描得到多张照片;对所述多张照片进行识别,得到所述多张照片中需收尘的至少一张第一照片;获取所述至少一张第一照片所在的子区域,其中,所述巡检区域包括至少一个子区域;发送命令,其中,所述命令用于指示对所述至少一张第一照片所在的子区域进行收尘。通过本技术解决了现有技术中需要人工巡检操作终端所导致的收尘劳动强度较大效率较低的问题,从而提高了收尘的自动化程度,降低了劳动强度,在一定程度上提高了收尘效率。
附图说明
18.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
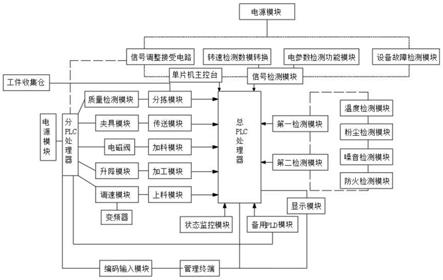
19.图1是根据本技术实施例的智能化集中收尘系统的工作原理示意图;
20.图2是根据本技术实施例的智能化集中收尘系统的巡检、吸尘过程示意图;
21.图3是根据本技术实施例的智能化集中收尘方法的流程图。
22.图中标号如下:1.真空单元,2.过滤单元,3.管网单元,31.主管,32.支管,33.自控阀,34.接头,35.软管,4.巡检单元,5.吸尘单元,6.智能控制单元。
具体实施方式
23.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
24.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
25.在本实施例中提供了一种智能化集中收尘方法,图3是根据本技术实施例的智能化集中收尘方法的流程图,如图3所示,该流程包括如下步骤:
26.步骤s302,通过摄像机对巡检区域(即可能需要进行粉尘收集的区域)进行扫描得到多张照片;
27.在该步骤中,可以获取预先配置的巡检间隔;根据所述巡检间隔调用所述摄像机对巡检区域进行扫描。
28.步骤s304,对所述多张照片进行识别,得到所述多张照片中需收尘(即存在粉尘堆积需要进行收尘的区域)的至少一张第一照片(即需收尘区域的照片);
29.步骤s306,获取所述至少一张第一照片所在的子区域(即需收尘的区域),其中,所述巡检区域包括至少一个子区域;
30.步骤s308,发送命令,其中,所述命令用于指示对所述至少一张第一照片所在的子区域进行收尘。
31.通过上述步骤解决了现有技术中需要人工巡检操作终端所导致的收尘劳动强度较大效率较低的问题,从而提高了收尘的自动化程度,降低了劳动强度,在一定程度上提高了收尘效率。
32.在本实施例中,作为一个可选的方式,还可以提供导航功能,在该功能中,在发送所述命令之前,还包括:获取所述至少一张第一照片所在的子区域在所述巡检区域中的位置;根据所述位置进行路径规划,得到收尘路径,所述收尘路径经过所有所述至少一张第一照片所在的子区域。此时,发送所述命令包括:将所述收尘路径携带在所述命令中,发送携带有所述收尘路径的所述命令。
33.在上述步骤中,对所述多张照片进行识别方式有很多种,例如:对所述多张照片中的每张照片进行识别,在某张照片中的粉尘到达预先设置的阈值的情况下,确定该照片为所述第一照片。
34.作为一个可以增加的实施方式,该阈值可以根据所述区域中的作业类型来设置不同的阈值,其中,不同的作业类型对粉尘的要求不同,对收尘要求较低的,则可以选择第一阈值,对收尘要求较高的,则可以选择第三阈值,对收尘要求中间的,可以选择第二阈值,其中,所述第一阈值大于所述第二阈值,所述第二阈值大于所述第三阈值。
35.作为另一个可以增加的实施方式,对照片的识别可以通过机器学习的方式来进行,使用多组训练数据训练一个机器学习模型,所述多组训练数据中的每一组训练数据均包括输入数据和输出数据,其中,所述输入数据为一张照片,所述输出数据为标签,所述标签用于标识所述照片反映的粉尘的四个等级,所述四个等级为第一等级、第二等级、第三等级和第四等级,所述第一等级的粉尘最多,所述第二等级的粉尘次多,所述第三等级的粉尘较少,所述第四等级的粉尘最少。经过训练之后,就可以使用了。将所述照片输入到所述机器学习模型中,得到该照片对应的等级。
36.在所述阈值配置第一阈值的情况下,只有第一等级的照片对应的子区域需要收尘(即吸尘),在所述阈值配置为第二阈值的情况下,第一等级和第二等级的照片对应的子区域需要收尘,在所述阈值配置为第三阈值的情况下,第一等级、第二等级和第三等级照片对应的子区域需要收尘。
37.在另一个可选实施方式中,hia可以通过摄像机定时或不定时地对巡检区域范围内的关键设备、重要作业、员工行为等进行周期性巡检,可以有效监管现场工作情况,减少甚至避免物的不安全或不环保状态、人的不安全或不环保行为、违章指挥,大大降低安全、环境风险。
38.下面结合一个可选的实施例进行说明,在该可选实施例中,克服现有技术的不足,提供一种智能控制,按需运行,节约运行费用,减少设备损耗,降低维护费用,延长系统寿命,可无人值守的智能化集中收尘系统。
39.在本实施例中提供了一种智能化集中收尘系统,如图1所示,其主要包括真空单元1、过滤单元2、管网单元3、巡检单元4、吸尘单元5、智能控制单元6,所述真空单元1的出气口
与大气连通,所述过滤单元2的出气口与所述真空单元1的进气口通过管道连接,所述管网单元3的出气口与所述过滤单元2的进气口通过管道连接,所述吸尘单元5的出气口与所述管网单元3的进气口连接,所述智能控制单元6与所述巡检单元4有线或无线互联,所述智能控制单元6与所述吸尘单元5有线或无线互联,所述智能控制单元6根据所述巡检单元4反馈的信息智能控制整套集中收尘系统的启动、运行、停机。
40.所述真空单元1包括真空机械,所述真空机械的出气口与大气连通。所述真空机械为容积式真空泵,或射流式真空泵,或离心风机。所述真空机械设有变频器或永磁调速器等调速机构,根据集中收尘系统的压力损失等自控调节所述真空机械的转速。所述真空机械的进口管道上设有压力表。
41.所述过滤单元2包括过滤器,所述过滤器的出气口与所述真空机械的进气口通过管道连接。所述过滤器为袋式过滤器,所述袋式过滤器内部设有自控清灰机构、自控卸灰机构。
42.所述管网单元3包括主管31、支管32、软管35、接头34,所述主管31的出气口与所述过滤器的进气口通过管道连接,若干路所述支管32的一端与所述主管31并联连接,所述支管32的另一端与所述软管35通过所述接头34连接。所述主管31与每一路所述支管32之间设有自控阀33。最远收尘点与所述过滤单元2的距离越远,所述支管32的直径越小。主管31与支管32之间的夹角为10~20度,主管31与两根支管32之间采用“y”形接头34,两根支管32之间夹角为25~35度。
43.所述巡检单元4包括摄像机,所述摄像机设有通信机构,若干个所述摄像机的空间扫描范围完全覆盖需吸尘的目标地面等,所述摄像机通过图像处理、机器视觉等智能识别目标地面的粉尘堆积、分布状况,判断目标地面的局部或全部区域的粉尘是否达到预先设定的需吸尘阈值,2个或多个摄像机能够确定需吸尘区域的坐标和外围轮廓。所述摄像机为枪机,或半球机,或球机,或枪球一体机,或热成像摄像机,或智能手机。
44.所述吸尘单元5包括智能驾驶吸尘车,所述智能驾驶吸尘车包括行走机构、定位机构、吸尘机构、控制机构、通信机构,所述定位机构、所述吸尘机构、所述控制机构、所述通信机构均与所述行走机构固定连接,所述吸尘机构与所述软管35连接。所述吸尘机构包括吸尘短管与吸尘嘴,所述吸尘嘴为扁吸尘嘴或细长吸尘嘴,所述吸尘短管与所述软管35通过接头34连接。所述定位机构为gps定位部件或北斗定位部件。一个所述吸尘单元5通过所述软管35单独连接一路所述支管32。
45.所述智能控制单元6包括智能控制器,所述智能控制器内设有cpu处理器、gpu处理器、数据存储器、蓝牙机构、通信机构、手机app端口,所述智能控制器与所述摄像机有线或无线物联,所述智能控制器与所述吸尘器有线或无线物联,所述智能控制器与所述管网单元3的所述自控阀33有线或无线物联。所述智能控制单元6根据所述巡检单元4反馈的信息自主控制整套集中收尘系统的启动、运行、停机。所述智能控制单元6可向相关人员手机发送app、短信,使相关人员随时掌握所述集中收尘系统的运行状况。
46.所述集中收尘系统用于收集易燃易爆粉尘时,应选择具有防暴、防泄漏功能的过滤器,并配置自动灭火保护、静电消除等装置。
47.图2是根据本技术实施例的智能化集中收尘系统的巡检、吸尘过程示意图,如图2所示,智能化集中收尘系统的巡检、作业过程可以分为下列主要步骤:
48.步骤1,所述巡检单元4按照预设的巡检间隔对巡检区域进行巡检,智能识别巡检范围内的粉尘堆积、分布状况,判断巡检范围内局部或全部区域的粉尘是否对达到需吸尘阈值,若没有达到需吸尘阀值,则不启动集中收尘的作业过程,待达到巡检间隔后再进行巡检;若达到需吸尘阀值,则智能确定需吸尘区域的坐标和外围轮廓;
49.步骤2,所述智能控制单元6收到所述巡检单元4发送的需吸尘区域的信号后,向与所述需吸尘区域对应的所述吸尘单元5发送信号,并智能规划相应的所述智能驾驶吸尘车的行走路径,所述智能驾驶吸尘车驶向所述需吸尘区域的外围轮廓处;
50.步骤3,所述智能控制单元6向与所述需吸尘区域对应的智能驾驶吸尘车配套的所述自控阀33发送信号,开启所述自控阀33;
51.步骤4,所述智能控制单元6向所述真空单元1发送信号,开启所述真空机械;
52.步骤5,所述智能驾驶吸尘车按照所述智能控制器规划的路径抽吸粉尘,完成吸尘后向所述智能控制单元6反馈信号,所述智能控制吸尘车停止行走、吸尘;
53.步骤6,所述智能控制单元6向所述真空单元1发送信号,所述真空机械停机;
54.步骤7,所述智能控制单元6向与上述已吸尘区域对应的智能驾驶吸尘车配套的所述自控阀33发送信号,关闭所述自控阀33;
55.步骤8,转入下一轮巡检/吸尘的作业过程,所述巡检单元4按照预设的巡检间隔对巡检区域再次进行巡检。
56.在本实施例中,可以通过智能控制,按需运行,节约运行费用,减少设备损耗,降低维护费用,延长系统寿命,可无人值守。
57.在本实施例中,提供一种电子装置,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述实施例中的方法。
58.上述程序可以运行在处理器中,或者也可以存储在存储器中(或称为计算机可读介质),计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
59.这些计算机程序也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤,对应与不同的步骤可以通过不同的模块来实现。
60.该本实施例中就提供了这样的一种装置或系统。该装置被称为智能化集中收尘装置,该装置包括的模块可以实现智能控制单元的功能,智能控制单元可以包括该装置中的模块,该装置包括:扫描模块,用于通过摄像机对巡检区域进行扫描得到多张照片;识别模块,用于对所述多张照片进行识别,得到所述多张照片中需吸尘的至少一张第一照片;获取模块,用于获取所述至少一张第一照片所在的子区域,其中,所述巡检区域包括至少一个子
区域;发送模块,用于发送命令,其中,所述命令用于指示对所述至少一张第一照片所在的子区域进行吸尘。
61.该系统或者装置用于实现上述的实施例中的方法的功能,该系统或者装置中的每个模块与方法中的每个步骤相对应,已经在方法中进行过说明的,在此不再赘述。
62.例如,在发送所述命令之前,所述获取模块还用于:获取所述至少一张第一照片所在的子区域在所述巡检区域中的位置;根据所述位置进行路径规划,得到吸尘路径,其中,所述吸尘经过所有所述至少一张第一照片所在的子区域。可选地,所述发送模块用于:将所述吸尘路径携带在所述命令中,发送携带有所述吸尘路径的所述命令。
63.又例如,所述识别模块用于:对所述多张照片中的每张照片进行识别,在某张照片中的粉尘到达预先设置的阈值的情况下,确定该照片为所述第一照片。可选地,所述扫描模块用于:获取预先配置的巡检间隔;根据所述巡检间隔调用所述摄像机对巡检区域进行扫描。
64.通过本技术实施例解决了现有技术中需要人工巡检操作终端所导致的收尘劳动强度较大效率较低的问题,从而提高了收尘的自动化程度,降低了劳动强度,在一定程度上提高了收尘效率。
65.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。