1.本实用新型涉及通信用天线技术领域,尤其涉及一种1-bit相位可重构变极化全金属反射阵列天线单元。
背景技术:
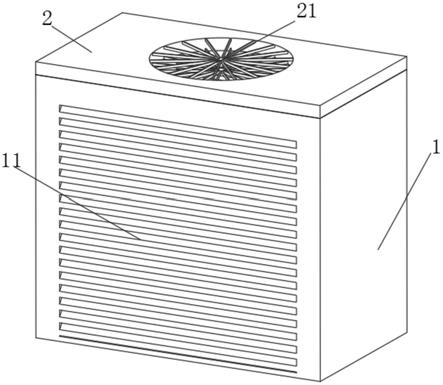
2.反射阵列是一种具有高增益的天线,因其具有极低的剖面、易于加工的结构、辐射效率高、成本低等特点,反射阵列天线被广泛地引用于各种通信场景。使用空间馈电方式进行馈电的反射阵列与传统的相控阵相比,前者无需复杂的馈电网络,大幅降低了天线的制造成本和复杂度。与同样是使用空间馈电的透射阵列天线相比,反射阵列通常具有更简单的单元结构,并且反射阵列的馈源入射空间与辐射波束出射空间共享同空间,空间利用率得到了大幅提升。反射阵列每个单元的相位不能像传统相控阵那样自由地控制,这使得反射阵列在波束扫描和波束赋形上受到了限制。
技术实现要素:
3.本实用新型所要解决的技术问题是如何提供一种能够分别实现1-bit相位可重构和极化可重构且介质损耗低的1-bit相位可重构变极化全金属反射阵列天线单元。
4.为解决上述技术问题,本实用新型所采取的技术方案是:一种1-bit相位可重构变极化全金属反射阵列天线单元,其特征在于,所述天线单元为全金属结构,包括:金属底座,所述金属底座的上表面设置有可转动的金属转盘,所述金属转盘上设置有两个第一扇形金属阶梯、两个第二扇形金属阶梯和两个第三扇形金属阶梯,所述扇形金属阶梯的圆心角为45
°
,两个所述第一扇形金属阶梯相对设置,两个所述第二扇形金属阶梯相对设置,两个所述第三扇形金属阶梯相对设置;所述金属底座为长方体型,所述金属转盘为圆柱体形;所述金属底座上设置有驱动装置,用于驱动所述金属转盘转动。
5.进一步的技术方案在于:所述第一扇形金属阶梯、第二扇形金属阶梯和第三扇形金属阶梯固定在所述金属转盘的上表面,且按照逆时针方向排列顺序为:第一个第一扇形金属阶梯、第一个第二扇形金属阶梯、第一个第三扇形金属阶梯、第二个第一扇形金属阶梯、第二个第二扇形金属阶梯、第二个第三扇形金属阶梯,第一个第三扇形金属阶梯与第二个第一扇形金属阶梯之间以及第二个第三扇形金属阶梯与第一个第一扇形金属阶梯之间的裸露的部分金属转盘的圆心角为45
°
。
6.进一步的技术方案在于:所述第二扇形金属阶梯的高度高于所述第一扇形金属阶梯的高度,所述第三扇形金属阶梯的高度高于所述第二扇形金属阶梯的高度。
7.进一步的技术方案在于:所述第一扇形金属阶梯与第二扇形金属阶梯之间的高度差以及所述第二扇形金属阶梯与第三扇形金属阶梯之间的高度差相等。
8.采用上述技术方案所产生的有益效果在于:本实用新型所述天线单元为全金属结构,大幅降低了介质损耗;同时天线的结构也变得更加紧凑,采用3d打印技术即可加工,天线的加工成本和难度也大大降低;
9.所述天线单元实现相位和极化可重构只需要机械地转动单元结构来切换不同的工作状态,不需要在天线单元中集成集总参数元件作为开关来控制单元的工作状态,使得天线单元不会因为集成集总参数元件而造成额外的损耗,天线单元的结构也更为简单;
10.所述天线单元拥有4个不同的工作状态,在实现1-bit相位可重构的同时还可以自由的选择反射波的极化;还可以灵活的控制反射波的相位和极化,适应不同的通信应用场景,使用更方便。
附图说明
11.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
12.图1为本实用新型实施例所述天线单元的结构示意图;
13.图2为本实用新型实施例所述天线单元结构侧视图;
14.图3为本实用新型实施例所述天线单元工作在00状态时的扇形金属阶梯分布图;
15.图4为本实用新型实施例所述天线单元工作在01状态时的扇形金属阶梯分布图;
16.图5为为本实用新型实施例所述天线单元工作在10状态时的扇形金属阶梯分布图;
17.图6为本实用新型实施例所述天线单元工作在11状态时的扇形金属阶梯分布图;
18.图7为本实用新型实施例所述天线单元反射波与入射波极化相同时的相位和幅度图;
19.图8为本实用新型实施例所述天线单元反射波与入射波极化正交时的相位和幅度图;
20.图9为本实用新型实施例所述天线单元旋转不同角度时反射波的相位图;
21.图10是本实用新型实施例所述天线单元工作在不同状态下的反射性能图;
22.其中:1、金属底座;2、金属转盘;3、第一扇形金属阶梯;4、第二扇形金属阶梯;5、第三扇形金属阶梯。
具体实施方式
23.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施例的限制。
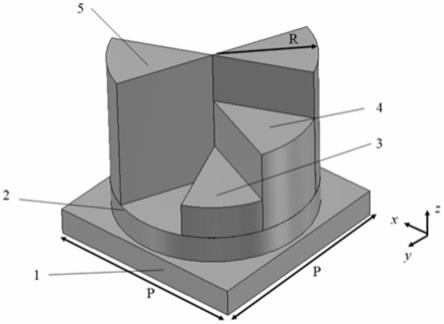
25.如图1和图2所示,本实用新型实施例公开了一种1-bit相位可重构变极化全金属反射阵列天线单元,金属底座1,优选的,所述金属底座的形状为矩形结构,当然所述金属底座1的具体形状还可以为其它规则的形状;所述金属底座1的上表面设置有可转动的金属转盘2,所述金属转盘2在驱动装置的带动下可以进行0-360
°
转动,所述驱动装置可以设置在所述金属底座1内,也可以设置在金属底座1的外侧;所述金属转盘2的上表面固定有两个第一扇形金属阶梯3、两个第二扇形金属阶梯4和两个第三扇形金属阶梯5,所述扇形金属阶梯
的在xoy平面投影形成的扇形的圆心角为45
°
,且两个所述第一扇形金属阶梯3相对设置,两个所述第二扇形金属阶梯4相对设置,两个所述第三扇形金属阶梯5相对设置,所述扇形金属阶梯使用金属材料进行制作,因此所述天线单元的整体为全金属结构。
26.进一步的,所述第一扇形金属阶梯3、第二扇形金属阶梯4和第三扇形金属阶梯5固定在所述金属转盘2的上表面,且按照逆时针方向排列顺序为:第一个第一扇形金属阶梯3、第一个第二扇形金属阶梯4、第一个第三扇形金属阶梯5、第二个第一扇形金属阶梯3、第二个第二扇形金属阶梯4、第二个第三扇形金属阶梯5,第一个第三扇形金属阶梯5与第二个第一扇形金属阶梯3之间以及第二个第三扇形金属阶梯5与第一个第一扇形金属阶梯3之间的裸露的部分金属转盘在xoy平面投影形成的扇形的圆心角为45
°
。此外,所述第二扇形金属阶梯4的高度高于所述第一扇形金属阶梯3的高度,所述第三扇形金属阶梯5的高度高于所述第二扇形金属阶梯4的高度。进一步的,所述第一扇形金属阶梯3与第二扇形金属阶梯4之间的高度差以及所述第二扇形金属阶梯4与第三扇形金属阶梯5之间的高度差相等。
27.进一步的,通过转动所述金属转盘2可以改变所述天线单元的工作状态,所述天线单元至少具有以下四种不同的状态:金属转盘旋转到0
°
或180
°
,即状态00、金属转盘旋转到45
°
或225
°
,即状态01、金属转盘旋转到90
°
或270
°
,即状态10、金属转盘旋转到135
°
或315
°
,即状态11。所述天线单元的结构关于原点中心对称(所述原点是指金属底座1的中心),所述单元从0
°
旋转到180
°
获得的性能与从180
°
旋转到360
°
是一致的。
28.进一步的,所述状态00和状态01下的单元反射相位相同,二者反射波的极化相互正交;状态10和状态11的单元反射相位相同,反射波极化相互正交,且与状态00和状态01的相位相差180
°
;单元从状态00或状态01顺时针旋转90
°
可以获得180
°
的反射相位差,且反射波极化不会发生改变;单元从状态00或状态10顺时针旋转45
°
后,单元的反射相位不会发生变化,但是反射波与入射波极化正交。
29.优选的,所述天线单元的工作频点为10.0 ghz,为了抑制阵列出现栅瓣,优选天线单元尺寸小于等于1/2个波长,金属底座1的长宽均可以为p=15.0 mm,金属底座1的厚度以为h1=2.0 mm;金属转盘2的半径r和厚度h2分别可以为7.2 mm和2.0 mm;第一扇形金属阶梯3、第二扇形金属阶梯4和第三扇形金属阶梯5的高度分别可以为h3=0.75 mm、h4=4.5 mm和h5=8.25 mm,半径r可以为7.2 mm;相邻扇形金属阶梯间的高度差为八分之一自由空间波长,即3.75 mm;每个所述扇形金属阶梯沿xoy面的截面积相等,且均为圆形金属转盘2上表面面积的1/8,需要说明的是,所述金属底座1、金属转盘2、第一扇形金属阶梯3、第二扇形金属阶梯4和第三扇形金属阶梯5的具体尺寸还可以为其它数值,并不限定于上述数值。
30.如图3、图4、图5和图6所示,所述天线单元有四种不同的工作状态;图3是所述天线单元工作在00状态时的扇形金属阶梯分布图,此时第一扇形阶梯3和第三扇形阶梯5分别与x轴和y轴平行(第一扇形阶梯3和第三扇形阶梯5的沿xoy面的投影的中心线);图4是所述天线单元工作在01状态时的扇形金属阶梯分布图,此时第二扇形阶梯4与x轴平行(第二扇形阶梯4沿xoy面的投影的中心线);图5是所述天线单元工作在10状态时的扇形金属阶梯分布图,此时第三扇形阶梯5和第一扇形阶梯3分别与x轴和y轴平行(第一扇形阶梯3和第三扇形阶梯5的沿xoy面的投影的中心线);图6是所述天线单元工作在11状态时的扇形金属阶梯分布图,此时第二扇形阶梯4与y轴平行(第二扇形阶梯4沿xoy面的投影的中心线);
31.图7是所述天线单元工作在状态00和10时产生的发射波的相位和幅度曲线图;单
元旋转0
°
、180
°
和360
°
时所述天线单元工作在00状态,所述天线单元产生与入射波极化相同的反射波,反射波相位为325
°
;所述天线单元旋转90
°
、270
°
时单元工作在10状态,单元产生与入射波极化相同的反射波,反射波相位为145
°
;所述天线单元工作在00和10状态时的反射幅度均大于-0.01db;验证了00状态和10状态下所述天线单元的反射波具有180
°
的相位差,且所述天线单元的反射损耗极小;
32.图8是所述天线单元工作在状态01和11时产生的发射波的相位和幅度曲线图;单元旋转45
°
、225
°
和405
°
时单元工作在01状态,所述天线单元产生与入射波极化正交的反射波,反射波相位为345
°
;所述天线单元旋转135
°
、315
°
时单元工作在11状态,所述天线单元产生与入射波极化正交的反射波,反射波相位为165
°
;所述天线单元工作在00和10状态时的反射幅度均大于-1 db;验证了01状态和11状态下天线单元的反射波具有180
°
的相位差,且所述天线单元的反射损耗较小;
33.图9是所述天线单元旋转不同角度,工作在不同状态下的反射波相位;图6验证了所述天线单元从状态00或状态01顺时针旋转90
°
可以获得180
°
的反射相位差,且反射波极化不会发生改变;所述天线单元从状态00或状态10顺时针旋转45
°
,所述天线单元的反射相位不会发生变化,但是反射波与入射波极化正交;说明该1-bit相位极化可重构全金属反射阵列天线单元具有1-bit相位可重构和极化可重构的特性;为了更加清晰地展示不同状态下的单元性能,图10罗列了单元工作在不同状态下的反射性能 。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。