1.本发明涉及空间坐标定位技术领域,具体为一种巡检机器人目标定位方法。
背景技术:
2.空间定位是一种非常普遍的算法,从传统的三维空间坐标定位,到现代的gps定位,都可以定位本身位置,巡检机器人也是如此。
3.现今市场上的巡检机器人性能十分优越,但是依然存在一定的不足之处,具体问题有以下几点:
4.(1)现有的巡检机器人在长距离移动过程中,机器人移动速度较慢,耗时长,并且消耗大量电能,降低了设备的续航能力;
5.(2)现有的巡检机器人在目标定位的过程中,由于摄像机的角度、俯仰角等变化会造成定位误差,大大降低了设备的定位精度;
6.(3)现有的巡检机器人在定位过程中方法复杂,耗时长,大大降低了工作效率。
技术实现要素:
7.本发明的目的在于提供一种巡检机器人目标定位方法,以解决上述背景技术中提出续航能力差、定位精度低以及工作效率低下的问题。
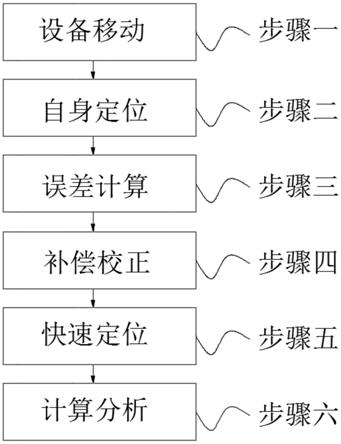
8.为实现上述目的,本发明提供如下技术方案:一种巡检机器人目标定位方法,包括以下步骤:步骤一,设备移动;步骤二,自身定位;步骤三,误差计算;步骤四,补偿校正;步骤五,快速定位;步骤六,计算分析;
9.其中在上述步骤一中,首先巡检机器人扣手抓住一侧的移动钢丝绳,随即钢丝绳带动机器人沿着滑轨运动,当距离指定位置1-2m时,扣手与钢丝绳脱离,随即自行沿滑轨运动到指定位置;
10.其中在上述步骤二中,当巡检机器人到达指定位置后,利用内置的北斗导航系统以及钢丝绳上的码盘定位分段复核来精确得出巡检机器人的三维坐标;
11.其中在上述步骤三中,当得出巡检机器人的三维坐标之后,巡检机器人底部的摄像机对巡检路线上设置的定位标志进行拍摄,随后利用特定算法计算得出巡检机器人此时的三维坐标与定位标志的三维坐标误差,继而根据误差重新计算摄像头的水平角、俯仰角、焦距值和焦点值;
12.其中在上述步骤四中,根据步骤三中计算的摄像头的水平角、俯仰角、焦距值和焦点值来调整摄像机,对摄像头的水平角、俯仰角、焦距值和焦点值进行补偿校准;
13.其中在上述步骤五中,利用步骤四中校准之后的摄像机来对目标物进行拍摄,利用可见光、红外光传感器来对目标物的数据进行采集;
14.其中在上述步骤六中,采集之后的数据传递到后台进行处理计算,并且结合巡检机器人自身位置坐标来对目标进行定位。
15.优选的,所述步骤一中,钢丝绳有两根,且运动方向相反。
16.优选的,所述步骤三中,摄像机利用sift算法来对定位标志的图像特征进行提取。
17.优选的,所述步骤三中,摄像机提取的特征点为5-7个。
18.优选的,所述步骤五中,特定算法为经典的zhang参数标定算法。
19.优选的,所述步骤五中,摄像机数据采集的图像为两张。
20.优选的,所述步骤六中,计算公式为:
21.其中z为摄像机到目标物的距离,f1和f2分别为大焦距和小焦距,r1和r2分别为对应的像点的矢量大小,δr=r
2-r1,α=(f
2-f1)/f1。
22.与现有技术相比,本发明的有益效果是:
23.1.本发明利用北斗定位加钢丝绳码盘定位分段复核的方式来确定设备自身位置与预设位置的差距,并且以此调整摄像机的水平角、俯仰角、焦距值和焦点值来进行数据误差补偿,大大降低了测量误差,有利于提升定位精度;
24.2.本发明通过钢丝绳的运动来带动巡检机器人的移动,加快了巡检机器人在长距离移动时的速度,并且避免了用电过度造成的续航里程下降的问题,延长了巡检机器人的续航能力;
25.3.本发明通过可见光、红外光传感器和摄像头采集的数据来进行定位,方法简单直接,工作效率高。
附图说明
26.图1为本发明的方法流程图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1,本发明提供的一种实施例:一种巡检机器人目标定位方法,包括以下步骤:步骤一,设备移动;步骤二,自身定位;步骤三,误差计算;步骤四,补偿校正;步骤五,快速定位;步骤六,计算分析;
29.其中在上述步骤一中,首先巡检机器人扣手抓住一侧的移动钢丝绳,且钢丝绳有两根,且运动方向相反,随即钢丝绳带动机器人沿着滑轨运动,当距离指定位置1-2m时,扣手与钢丝绳脱离,随即自行沿滑轨运动到指定位置;
30.其中在上述步骤二中,当巡检机器人到达指定位置后,利用内置的北斗导航系统以及钢丝绳上的码盘定位分段复核来精确得出巡检机器人的三维坐标;
31.其中在上述步骤三中,当得出巡检机器人的三维坐标之后,巡检机器人底部的摄像机对巡检路线上设置的定位标志进行拍摄,且摄像机利用sift算法来对定位标志的图像特征进行提取,提取的特征点为5-7个,随后利用特定算法计算得出巡检机器人此时的三维坐标与定位标志的三维坐标误差,且特定算法为经典的zhang参数标定算法,继而根据误差重新计算摄像头的水平角、俯仰角、焦距值和焦点值;
32.其中在上述步骤四中,根据步骤三中计算的摄像头的水平角、俯仰角、焦距值和焦点值来调整摄像机,对摄像头的水平角、俯仰角、焦距值和焦点值进行补偿校准;
33.其中在上述步骤五中,利用步骤四中校准之后的摄像机来对目标物进行拍摄,且摄像机数据采集的图像为两张,利用可见光、红外光传感器来对目标物的数据进行采集;
34.其中在上述步骤六中,采集之后的数据传递到后台进行处理计算,并且结合巡检机器人自身位置坐标来对目标进行定位,且计算公式为:
35.其中z为摄像机到目标物的距离,f1和f2分别为大焦距和小焦距,r1和r2分别为对应的像点的矢量大小,δr=r
2-r1,α=(f
2-f1)/f1。
36.基于上述,本发明的优点在于,本发明的巡检机器人在移动过程中利用轨道驱动和钢绳驱动相结合的方式,长距离移动时采用钢绳驱动,不仅仅提高了移动速度,而且减少了巡检机器人自身电池的消耗,延长了设备的续航时间,并且本发明采用可见光、红外光传感器和摄像头采集的数据来进行定位,方法简单直接,工作效率高,同时利用北斗定位加钢丝绳码盘定位分段复核的方式来确定设备自身位置与预设位置的差距,并且以此调整摄像机的水平角、俯仰角、焦距值和焦点值来实现数据误差补偿,大大降低了测量误差,有利于提升定位精度。
37.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。