技术特征:
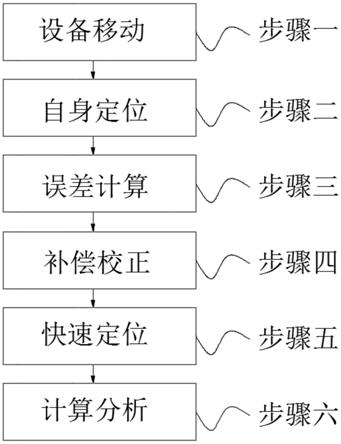
1.一种巡检机器人目标定位方法,包括以下步骤:步骤一,设备移动;步骤二,自身定位;步骤三,误差计算;步骤四,补偿校正;步骤五,快速定位;步骤六,计算分析;其特征在于:其中在上述步骤一中,首先巡检机器人扣手抓住一侧的移动钢丝绳,随即钢丝绳带动机器人沿着滑轨运动,当距离指定位置1-2m时,扣手与钢丝绳脱离,随即自行沿滑轨运动到指定位置;其中在上述步骤二中,当巡检机器人到达指定位置后,利用内置的北斗导航系统以及钢丝绳上的码盘定位分段复核来精确得出巡检机器人的三维坐标;其中在上述步骤三中,当得出巡检机器人的三维坐标之后,巡检机器人底部的摄像机对巡检路线上设置的定位标志进行拍摄,随后利用特定算法计算得出巡检机器人此时的三维坐标与定位标志的三维坐标误差,继而根据误差重新计算摄像头的水平角、俯仰角、焦距值和焦点值;其中在上述步骤四中,根据步骤三中计算的摄像头的水平角、俯仰角、焦距值和焦点值来调整摄像机,对摄像头的水平角、俯仰角、焦距值和焦点值进行补偿校准;其中在上述步骤五中,利用步骤四中校准之后的摄像机来对目标物进行拍摄,利用可见光、红外光传感器来对目标物的数据进行采集;其中在上述步骤六中,采集之后的数据传递到后台进行处理计算,并且结合巡检机器人自身位置坐标来对目标进行定位。2.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤一中,钢丝绳有两根,且运动方向相反。3.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤三中,摄像机利用sift算法来对定位标志的图像特征进行提取。4.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤三中,摄像机提取的特征点为5-7个。5.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤五中,特定算法为经典的zhang参数标定算法。6.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤五中,摄像机数据采集的图像为两张。7.根据权利要求1所述的一种巡检机器人目标定位方法,其特征在于:所述步骤六中,计算公式为:其中z为摄像机到目标物的距离,f1和f2分别为大焦距和小焦距,r1和r2分别为对应的像点的矢量大小,δr=r
2-r1,α=(f
2-f1)/f1。
技术总结
本发明公开了一种巡检机器人目标定位方法,包括以下步骤:步骤一,设备移动;步骤二,自身定位;步骤三,误差计算;步骤四,补偿校正;步骤五,快速定位;步骤六,计算分析;本发明利用北斗定位加钢丝绳码盘定位分段复核的方式来确定设备自身位置与预设位置的差距,以此调整摄像机的水平角、俯仰角、焦距值和焦点值来实现数据误差补偿,大大降低了测量误差,提升了定位精度,通过钢丝绳的运动来带动巡检机器人的移动,加快了巡检机器人在长距离移动时的速度,并且避免了用电过度造成的续航里程下降的问题,延长了巡检机器人的续航能力,通过可见光、红外光传感器和摄像头采集的数据来进行定位,方法简单直接,工作效率高。工作效率高。工作效率高。
技术研发人员:谭建忠 姜建胜 朱文龙
受保护的技术使用者:智动时代(北京)科技有限公司
技术研发日:2021.12.13
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。