1.本发明属于智能材料和微细加工领域,涉及一种磁控仿生薄膜微结构的制造方法。
背景技术:
2.磁流变弹性体(magnetorheological elastomer,mre)是一种由非磁性的弹性聚合物基体和磁性粒子组成的复合材料,能够对磁场、力、温度等外界刺激产生响应,具有磁致弹性、磁致电阻、磁致伸缩、压电电阻、热阻等功能特性,在工程领域应用前景广阔。现有技术主要涉及大尺度mre材料的力学性能及应用,其中也包括摩擦性能及应用,但没有关于微尺度mre材料摩擦性能及应用的技术方案。
技术实现要素:
3.为了提升小尺度软体机器人的运动控制,本发明提供了一种磁控仿生薄膜微结构的制造方法。
4.本发明的技术方案是:
5.一种磁控仿生薄膜微结构的制造方法,包括以下步骤:
6.s1.将负光刻胶均匀旋涂于基底上;
7.s2.采用光刻工艺在负光刻胶表面形成微米尺度正六边形凹槽阵列凹模板;
8.s3.将pdms预聚物和固化剂以重量比10:1充分混合得到pdms混合物;
9.s4.将磁性纳米粒子以10%-40%的重量百分比与步骤s3所得pdms混合物混合均匀,得到pdms-磁性纳米粒子液态混合物;
10.s5.将步骤s2所得凹模板放置于匀胶机样品台中心位置并固定,取步骤s4获得的pdms-磁性纳米粒子液态混合物置于凹模版的中心部位进行旋涂,得到厚度30-100微米的pdms-磁性纳米粒子复合涂膜;
11.s6.将步骤s5获得的pdms-磁性纳米粒子复合涂膜放置于磁场中60-80分钟,在磁场作用下磁性纳米粒子沿磁场方向重新排列,形成各向异性显微组织;
12.s7.烘烤步骤s6所述处于磁场中的pdms-磁性纳米粒子复合涂膜,直至pdms完全固化,剥离凹模板即得到磁控仿生薄膜微结构。
13.进一步地,将步骤s5所得的pdms-磁性纳米粒子复合涂膜不经步骤s6处理,而是直接烘烤、脱模,即执行步骤s7,所得薄膜微结构的显微组织为各向同性。
14.进一步地,所述s4中混合方式为:用玻璃棒充分搅拌后,放入超声波振荡仪中振荡10-30分钟,然后使用涡旋混匀器振荡1-3分钟,得到pdms-磁性纳米粒子液态混合物。
15.进一步地,所述磁性纳米粒子为fe3o4纳米粒子或羰基铁纳米粒子。
16.进一步地,所述磁性纳米粒子为粒径20-50nm的球形粒子。
17.进一步地,所述s6中磁场方向平行或者垂直于pdms-磁性纳米粒子复合涂膜。
18.采用本发明方法制造的磁控仿生薄膜微结构是表面具有微米尺度正六棱柱阵列
的以pdms为基体的磁流变弹性体薄膜微结构。由于尺度效应,微尺度材料磁流变弹性体薄膜具有不同于大尺度磁流变弹性体材料的磁致力学性能。本发明通过在仿生材料pdms的薄膜微结构中添加一定量的磁性纳米粒子,制造了磁控仿生薄膜微结构,通过改变施加的外磁场调节pdms基磁流变弹性体薄膜材料的弹性模量,从而改变薄膜微结构的摩擦性能。另一方面,本发明的薄膜表面的微米尺度正六棱柱阵列微结构设计来源于树蛙足趾板表面的六棱柱结构,这种精细的微结构是生物进化过程中形成的几何优化结构,有利于树蛙的爬行运动。本发明的磁控仿生薄膜微结构可用于小尺度软体机器人的足部或体表,当机器人爬行时施加磁场会改变薄膜微结构的弹性模量,进而导致机器人足部或体表与外界环境物表面的接触面积和摩擦力发生变化,最终改变机器人的运动状态。因此通过施加磁场可以控制机器人的运动。相比其它驱动方式,磁力驱动不需要表面接触、无磨损,驱动系统结构简单、可靠性高,此外,磁场驱动不需要媒介,可以在比较大的空间范围实施。
19.本发明的薄膜微结构由pdms和磁性纳米粒子组成的复合材料制造,磁性纳米粒子在pdms中的分布和形态会显著影响薄膜材料的磁致弹性模量。磁性纳米粒子过于弥散不利于磁响应特性,但如果结团过于严重和分布不均匀又不利于在薄膜表面形成精细的微结构。在本发明提供的薄膜微结构制造方法中,通过详细的限定磁性纳米粒子与pdms混合物的混合比例和混合方式,适当地结合玻璃棒搅拌、超声波振荡和涡旋混匀控制磁性纳米粒子在pdms中的分布和形态,获得的薄膜微结构既具有良好的磁响应特性,又能够形成精细的薄膜表面微结构。另外,薄膜的显微组织和磁性纳米粒子的浓度对磁致弹性模量有显著影响,本发明提供了3种显微组织的形成方法并限定了磁性纳米粒子的浓度范围,可以实现通过磁场有效地控制薄膜微结构的摩擦性能和运动特性。
附图说明
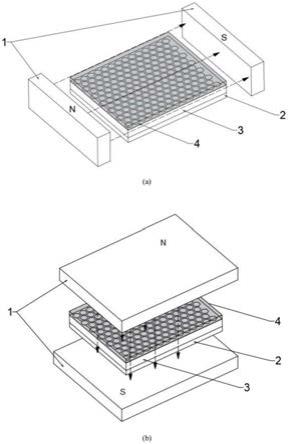
20.图1为在制造本发明的磁控仿生薄膜微结构过程中施加磁场的示意图:(a)磁场方向平行于薄膜表面;(b)磁场方向垂直于薄膜表面。
21.图2具有不同显微组织的磁控仿生薄膜微结构示意图:(a)平行各向异性显微组织(fe3o4纳米粒子聚集形成平行于薄膜表面的纤维状结构);(b)垂直各向异性显微组织(fe3o4纳米粒子聚集形成垂直于薄膜表面的柱状结构);(c)各向同性显微组织。
22.图3为pdms-fe3o4复合薄膜显微组织的光学显微镜图片:(a)平行各向异性,fe3o4重量百分比为10%;(b)垂直各向异性,fe3o4重量百分比为10%;(c)各向同性,fe3o4重量百分比为10%;(d)平行各向异性,fe3o4重量百分比为40%;(e)垂直各向异性,fe3o4重量百分比为40%;(f)各向同性,fe3o4重量百分比为40%。薄膜厚度均为13微米。
23.图4为pdms-fe3o4复合薄膜中的磁致应力随fe3o4浓度(重量百分比)变化的关系曲线图。薄膜厚度为13微米;所施加磁场的方向平行于薄膜表面,磁感应强度为150mt。
24.图5(a)为平行各向异性(fe3o4纳米粒子聚集形成平行于薄膜表面的纤维状结构)pdms-10%fe3o4复合薄膜中用于数字图像相关分析的区域;(b)所选择薄膜区域在外磁场作用下沿平行于磁场方向的应变分布;(c)所选择薄膜区域在外磁场作用下沿垂直于磁场方向的应变分布。薄膜厚度为13微米,薄膜中fe3o4重量百分数为10%;所施加磁场的方向平行于薄膜表面,磁感应强度为80mt。
25.图6(a)为垂直各向异性(fe3o4纳米粒子聚集形成垂直于薄膜表面的柱状结构)
pdms-10%fe3o4复合薄膜中用于数字图像相关分析的区域;(b)所选择薄膜区域在外磁场作用下沿平行于磁场方向的应变分布;(c)所选择薄膜区域在外磁场作用下沿垂直于磁场方向的应变分布。薄膜厚度为13微米,薄膜中fe3o4重量百分数为10%;所施加磁场的方向平行于薄膜表面,磁感应强度为80mt。
26.图7(a)为各向同性(fe3o4纳米粒子聚集团块随机分布于基体中)pdms-10%fe3o4复合薄膜中用于数字图像相关分析的区域;(b)所选择薄膜区域在外磁场作用下沿平行于磁场方向的应变分布;(c)所选择薄膜区域在外磁场作用下沿垂直于磁场方向的应变分布。薄膜厚度为13微米,薄膜中fe3o4重量百分数为10%;所施加磁场的方向平行于薄膜表面,磁感应强度为80mt。
27.附图标号说明:1-永磁体,2-硅基片,3-凹模板,4-pdms-fe3o4复合薄膜。
具体实施方式
28.下面结合附图对本发明作进一步详细说明。
29.实施例1:具有平行各向异性显微组织的磁控仿生薄膜微结构的制造方法
30.s1.将负光刻胶su-8 2050(microchem)均匀旋涂于清洗过的硅基底上;
31.s2.采用光刻工艺在步骤s1所得的负光刻胶上形成微米尺度正六边形凹槽阵列,即凹模板;
32.s3.将pdms预聚物和固化剂(道康宁sylgard 184)以重量比10:1混合,用玻璃棒搅拌均匀后将pdms混合物放入超声波振荡仪(天津奥特赛恩斯仪器有限公司as2060b)中振荡,一方面去除气泡,另一方面促进两种成分进一步充分混合;
33.s4.将粒径20nm的球形fe3o4纳米粒子(aladdin chemistry co.,ltd.)以10%的重量百分比与步骤s3所得pdms混合物混合;混合方式为:用玻璃棒充分搅拌后,放入超声波振荡仪中振荡20分钟,最后使用涡旋混匀器(美国scilogex mx-e)振荡1分钟,即得到pdms-fe3o4纳米粒子液态混合物;
34.s5.将步骤s2所得凹模板放置于匀胶机(中国科学院微电子研究所kw-4a)样品台中心位置并固定,取步骤s4获得的pdms-fe3o4纳米粒子液态混合物倾倒于硅基片中心部位进行旋涂,旋涂参数设置为:转速2000rpm,时间60s。本实施例中旋涂后即得到厚度30微米的pdms-fe3o4纳米粒子复合涂膜;
35.s6.将步骤s5获得的pdms-fe3o4纳米粒子复合涂膜放置于磁场中60分钟,磁场方向平行于复合涂膜表面(图1(a)),在磁场作用下fe3o4纳米粒子聚集形成平行于薄膜表面的纤维状结构,使复合涂膜具有平行各向异性显微组织(图2(a)中的放大小图);
36.s7.烘烤步骤s6所述处于磁场中的pdms-fe3o4纳米粒子复合涂膜直至pdms完全固化,剥离凹模板即得到具有平行各向异性显微组织的磁控仿生薄膜微结构(图2(a))。
37.实施例2:具有垂直各向异性显微组织的磁控仿生薄膜微结构的制造方法
38.实施例2与实施例1的区别在于:在步骤s6中,所施加磁场垂直于复合涂膜表面(图1(b)),在磁场作用下fe3o4纳米粒子聚集形成垂直于薄膜表面的柱状结构,使复合涂膜具有垂直各向异性显微组织(图2(b)中的放大小图),完成步骤s7后得到具有垂直各向异性显微组织的磁控仿生薄膜微结构(图2(b))。
39.实施例3:具有各向同性显微组织的磁控仿生薄膜微结构的制造方法
40.实施例3与实施例1的区别在于:在完成步骤s5后直接执行步骤s7,即在制造薄膜微结构的过程中不施加磁场,完成步骤s7后得到具有各向同性显微组织的磁控仿生薄膜微结构(图2(c)),fe3o4纳米粒子聚集团块随机分布于基体中(图2(c)中的放大小图)。
41.pdms-fe3o4复合薄膜的力学表征:
42.在磁场的作用下,薄膜中的fe3o4磁性粒子倾向于在弹性体pdms中沿磁场方向排列,导致薄膜的弹性模量发生变化,以及产生薄膜磁致应力和磁致应变。薄膜的显微组织和fe3o4纳米粒子浓度对磁致弹性模量有显著影响,图3显示了pdms-10%fe3o4和pdms-40%fe3o4薄膜的平行各向异性、垂直各向异性以及各向同性3种显微组织。
43.采用薄膜应力测量仪(toho technology,flx-2320-s,nagoya,japan)测量复合薄膜的磁致应力,3种显微组织薄膜的磁致应力随fe3o4浓度变化的趋势如图4所示。实验结果显示,薄膜的显微组织和fe3o4纳米粒子浓度均对磁致应力有显著影响。采用数字图像相关技术(digital image correlation,dic)测量复合薄膜的磁致应变,实验结果显示,对于pdms-fe3o4(fe3o4重量百分数在10%-40%范围内)复合薄膜的3种显微组织薄膜,施加磁场均能产生显著的磁致应变。图5、6、7为3种显微组织pdms-10%fe3o4薄膜在磁场作用下的应变分布。
44.薄膜磁致应力和磁致应变的测量结果表明,在磁场的作用下,fe3o4磁性粒子之间以及磁性粒子与基体之间会发生显著的相互作用,从而会导致复合薄膜的弹性模量发生显著变化。将本发明的磁控仿生薄膜微结构用于小尺度软体机器人的足部或体表,当机器人爬行时施加磁场会改变薄膜微结构的弹性模量,从而导致机器人足部或体表与外界环境物表面的接触面积和摩擦力发生变化,最终改变机器人的运动状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。