1.本技术涉及光学元件领域,更具体地涉及一种镜头及热像仪。
背景技术:
2.红外、微光技术使红外系统在不同的波长进行成像,同步探测目标的二维几何空间与一维光谱信息,然后利用一定的图像处理算法对多波段图像进行分析处理,充分利用各种信道中的有用信息合成图像。
3.目前的红外系统无热化设计一般有三种方法:光学被动式、机械主动式和机械被动式。其中机械主动式是利用测温系统反馈机械调焦,结构复杂且可靠性差;机械被动式是利用机械结构补偿高低温时焦面的位移,该方式加工精度要求高,装配困难。因此亟待一种成本低、可靠性高、满足红外市场需求的镜头。
技术实现要素:
4.鉴于上述现有技术的状态而做出本技术。本技术的目的在于提供一种镜头及热像仪,其能够克服上述背景技术中说明的缺点中的至少一个缺点。
5.为了实现上述目的,本技术采用如下的技术方案。
6.本技术提供了一种如下的镜头,包括:第一透镜,其为负弯月透镜,所述第一透镜的凹面朝向物侧,所述第一透镜的凸面朝向像侧;第二透镜,其为双凸透镜;以及第三透镜,其为正弯月透镜,所述第三透镜的凸面朝向所述物侧,所述第三透镜的凹面朝向所述像侧;其中,所述第一透镜、所述第二透镜和所述第三透镜沿光轴从所述物侧朝向所述像侧依次排列。
7.在一种可选的技术方案中,所述镜头的焦距为f,所述第一透镜的焦距f1满足-5《f1/f《-3,所述第二透镜的焦距f2满足1《f2/f《3,所述第三透镜的焦距f3满足0.5《f3/f《3。
8.在另一种可选的技术方案中,所述第一透镜朝向所述物侧的一面为第一面,所述第一透镜朝向所述像侧的一面为第二面,所述第二透镜朝向所述物侧的一面为第三面,所述第二透镜朝向所述像侧的一面为第四面,所述第三透镜朝向所述物侧的一面为第五面,所述第三透镜朝向所述像侧的一面为第六面,所述第一面、所述第二面、所述第三面、所述第四面、所述第五面和所述第六面为非球面,所述非球面满足
[0009][0010]
其中,z为所述非球面上的一点在所述光轴方向上的矢高,r为所述一点与所述光轴之间的最短距离,c为所述非球面的曲率半径,k为所述非球面的圆锥系数,αi为所述非球面的非球面系数,i为级数中多项式项数的序号,n为级数中多项式的总项数。
[0011]
在另一种可选的技术方案中,所述第四面为衍射面,所述衍射面满足
[0012][0013]
其中,φ为所述衍射面的相位,m为所述衍射面的衍射级次,ai为级数中各项的系数,ρ为所述衍射面的归一化的径向孔径坐标,i为级数中多项式项数的序号,n为级数中多项式的总项数。
[0014]
在另一种可选的技术方案中,所述第一面满足α2=1.00e-5rad,α3=1.40e-6rad,α4=5.04e-8rad,α5=6.18e-10rad,α6=8.18e-12rad,α7=-5.02e-13rad,α8=-3.10e-14rad,α9=5.55e-16rad,α
10
=4.32e-18rad,k=-0.65294,-5mm≤c≤-10mm,所述第二面满足α2=3.44e-5rad,α3=4.74e-7rad,α4=2.85e-9rad,α5=2.83e-11rad,α6=3.68e-13rad,α7=1.46e-14rad,α8=1.46e-16rad,α9=-1.02e-18rad,α
10
=-8.69e-20rad,k=-0.54444,-20mm≤c≤-15mm,所述第三面满足α2=-6.92e-6rad,α3=-8.68e-8rad,α4=-2.27e-10rad,α5=1.94e-12rad,α6=2.85e-14rad,α7=2.84e-16rad,α8=2.80e-18rad,α9=1.04e-21rad,α
10
=1.24e-24rad,k=-1.46567,35mm≤c≤40mm,所述第四面满足α2=-1.73e-5rad,α3=-9.15e-8rad,α4=-3.61e-10rad,α5=-2.83e-12rad,α6=-2.35e-14rad,α7=2.97e-16rad,α8=1.12e-17rad,k=6.12382,-95mm≤c≤-90mm,a1=-3622,a2=14671,a3=-20656282,a4=3.96e 9,a5=-2.48e 11,m=100,所述第五面满足α2=8.10e-5rad,α3=6.76e-7rad,α4=-4.15e-9rad,α5=-8.34e-11rad,α6=-5.701e-13rad,α7=4.92e-15rad,α8=1.32e-16rad,α9=7.12e-19rad,α
10
=-2.04e-20rad,k=51.80644,65mm≤c≤70mm,所述第六面满足α2=1.10e-4rad,α3=2.31e-6rad,α4=-8.38e-9rad,α5=8.95e-11rad,α6=-1.10e-12rad,α7=2.24e-15rad,α8=1.45e-16rad,α9=7.31e-18rad,α
10
=-1.72e-20rad,k=-419.12279,-110mm≤c≤-100mm。
[0015]
在另一种可选的技术方案中,所述第一透镜在所述光轴上的厚度为6.21mm,所述第二透镜在所述光轴上的厚度为4.05mm,所述第三透镜在所述光轴上的厚度为6.36mm,所述第一透镜和所述第二透镜在所述光轴上的空气间隔为0.5mm,所述第二透镜和所述第三透镜在所述光轴上的空气间隔为5.94mm。
[0016]
在另一种可选的技术方案中,所述镜头的f数为1,所述镜头的视场角大于或等于35.5
°
,所述镜头的工作波长λ满足8μm≤λ≤14μm,所述镜头的光学总长小于或等于31mm,所述镜头的光学后截距大于或等于8mm,所述镜头的焦距f满足f=9.6mm。
[0017]
在另一种可选的技术方案中,还包括保护玻璃,所述保护玻璃在所述光轴上位于所述第三透镜的像侧,所述保护玻璃和所述第三透镜在所述光轴上的空气间隔为6mm。
[0018]
在另一种可选的技术方案中,所述第一透镜、所述第二透镜和所述第三透镜包括硫系玻璃。
[0019]
本技术还提供了一种如下的热像仪,包括上述的镜头和非制冷长波红外探测器。
[0020]
采用上述技术方案,镜头能够自行适应温度的变化,从而满足镜光学系统的光焦度、消色差和消热差需求,提升了光学系统的性能。此外,镜头采用光学被动式的设计而无需增加调焦机构,使得镜头在具有较高的可靠性的同时具有较低的成本。
附图说明
[0021]
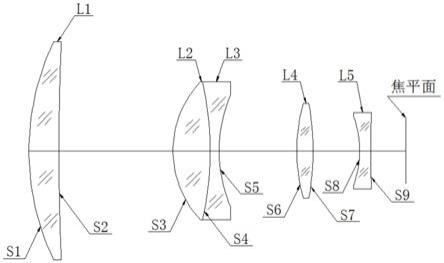
图1示出了根据本技术的一实施例的镜头的示意图。
[0022]
图2示出了图1中的镜头在20℃下的光学函数曲线图。
[0023]
图3示出了图1中的镜头在-40℃下的光学函数曲线图。
[0024]
图4示出了图1中的镜头在60℃下的光学函数曲线图。
[0025]
图5示出了图1中的镜头的场曲图。
[0026]
图6示出了图1中的镜头的畸变图。
[0027]
图7示出了图1中的镜头的像面照度图。
[0028]
附图标记说明
[0029]
1第一透镜;11第一面;12第二面;
[0030]
2第二透镜;21第三面;22第四面;
[0031]
3第三透镜;31第五面;32第六面;
[0032]
4保护玻璃;
[0033]
5感光元件;
[0034]
o光轴。
具体实施方式
[0035]
下面参照附图描述本技术的示例性实施例。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本技术,而不用于穷举本技术的所有可行的方式,也不用于限制本技术的范围。
[0036]
在本技术中,如无特殊说明,“e”表示科学计数法。例如,1.00e-5表示1.00
×
10-5
。
[0037]
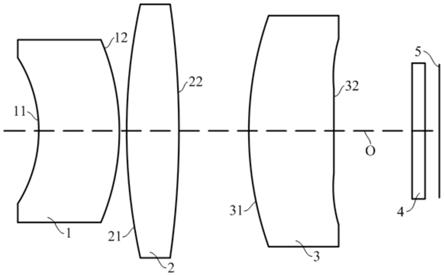
图1至图7示出了根据本技术的一实施例的镜头,其可以包括第一透镜1、第二透镜2、第三透镜3和保护玻璃4。
[0038]
参照图1,第一透镜1、第二透镜2和第三透镜3可以沿光轴o从物侧朝向像侧依次排列。其中,第一透镜1可以为负弯月透镜,其凹面朝向物侧,其凸面朝向像侧。第二透镜2可以为双凸透镜。第三透镜3可以为正弯月透镜,其凸面朝向物侧,其凹面朝向像侧。这样,镜头能够自行适应温度的变化,从而满足镜光学系统的光焦度、消色差和消热差需求,提升了光学系统的性能。此外,镜头采用光学被动式的设计而无需增加调焦机构,使得镜头在具有较高的可靠性的同时具有较低的成本。
[0039]
镜头的焦距f可以与各透镜的焦距满足特定的关系。具体地,第一透镜1的焦距f1可以满足-5《f1/f《-3,第二透镜2的焦距f2可以满足1《f2/f《3,第三透镜3的焦距f3可以满足0.5《f3/f《3。
[0040]
各透镜的透镜面可以为非球面。具体地,第一透镜1朝向物侧的一面可以为第一面11,第一透镜1朝向像侧的一面可以为第二面12。第二透镜2朝向物侧的一面可以为第三面21,第二透镜2朝向像侧的一面可以为第四面22。第三透镜3朝向物侧的一面可以为第五面31,第三透镜3朝向像侧的一面可以为第六面32。第一面11、第二面12、第三面21、第四面22、第五面31和第六面32可以满足
[0041][0042]
其中,z为非球面上的一点在光轴o方向上的矢高,r为非球面上的一点与光轴o之
间的最短距离,c为非球面的曲率半径,k为非球面的圆锥系数,αi为非球面的非球面系数,i为级数中多项式项数的序号,n为级数中多项式的总项数。
[0043]
各透镜的透镜面可以在为非球面的同时为衍射面。具体地,第四面22可以为衍射面,其可以满足
[0044][0045]
其中,φ为衍射面的相位,m为衍射面的衍射级次,ai为级数中各项的系数,ρ为衍射面的归一化的径向孔径坐标,i为级数中多项式项数的序号,n为级数中多项式的总项数。
[0046]
通过确定上述公式的参数,各透镜可以形成为特定的非球面和衍射面。例如,第一面11可以满足α2=1.00e-5rad,α3=1.40e-6rad,α4=5.04e-8rad,α5=6.18e-10rad,α6=8.18e-12rad,α7=-5.02e-13rad,α8=-3.10e-14rad,α9=5.55e-16rad,α
10
=4.32e-18rad,k=-0.65294,-5mm≤c≤-10mm。第二面12可以满足α2=3.44e-5rad,α3=4.74e-7rad,α4=2.85e-9rad,α5=2.83e-11rad,α6=3.68e-13rad,α7=1.46e-14rad,α8=1.46e-16rad,α9=-1.02e-18rad,α
10
=-8.69e-20rad,k=-0.54444,-20mm≤c≤-15mm。第三面21可以满足α2=-6.92e-6rad,α3=-8.68e-8rad,α4=-2.27e-10rad,α5=1.94e-12rad,α6=2.85e-14rad,α7=2.84e-16rad,α8=2.80e-18rad,α9=1.04e-21rad,α
10
=1.24e-24rad,k=-1.46567,35mm≤c≤40mm。第四面22可以满足α2=-1.73e-5rad,α3=-9.15e-8rad,α4=-3.61e-10rad,α5=-2.83e-12rad,α6=-2.35e-14rad,α7=2.97e-16rad,α8=1.12e-17rad,k=6.12382,-95mm≤c≤-90mm,a1=-3622,a2=14671,a3=-20656282,a4=3.96e 9,a5=-2.48e 11,m=100。第五面31可以满足α2=8.10e-5rad,α3=6.76e-7rad,α4=-4.15e-9rad,α5=-8.34e-11rad,α6=-5.701e-13rad,α7=4.92e-15rad,α8=1.32e-16rad,α9=7.12e-19rad,α
10
=-2.04e-20rad,k=51.80644,65mm≤c≤70mm。第六面32可以满足α2=1.10e-4rad,α3=2.31e-6rad,α4=-8.38e-9rad,α5=8.95e-11rad,α6=-1.10e-12rad,α7=2.24e-15rad,α8=1.45e-16rad,α9=7.31e-18rad,α
10
=-1.72e-20rad,k=-419.12279,-110mm≤c≤-100mm。其中,级数中未给出的项可以为0。
[0047]
为了使镜头适配便携设备,镜头可以具有小型化的设计。例如,镜头的焦距f可以为9.6mm。第一透镜1和第二透镜2在光轴o上的空气间隔可以为0.5mm,第二透镜2和第三透镜3在光轴o上的空气间隔可以为5.94mm。第一透镜1在光轴o上的厚度可以为6.21mm,第二透镜2在光轴o上的厚度可以为4.05mm,第三透镜3在光轴o上的厚度可以为6.36mm。镜头的光学总长可以小于或等于31mm。镜头的光学后截距可以大于或等于8mm。这样,镜头能够具有较小的大小和重量。例如,镜头的重量可以为16g。
[0048]
镜头可以作为热像仪的光学系统的至少一部分。相应地,镜头的f数可以为1。镜头的视场角可以大于或等于35.5
°
,例如视场角可以为43.6
°
。镜头的工作波长λ可以满足8μm≤λ≤14μm。第一透镜1、第二透镜2和第三透镜3可以由硫系玻璃制成。具体地,可以采用模压的方式加工各透镜以降低镜头的生产成本。
[0049]
镜头还包括保护玻璃4。具体地,保护玻璃4可以为平板玻璃。保护玻璃4可以设置于第三透镜3和感光元件5之间,并且和第三透镜3在光轴o上的空气间隔可以为6mm。这样,保护玻璃4能够避免各透镜和感光元件5的损坏。当然,保护玻璃4不是必须的。
[0050]
参照图2至图4,其示出了镜头的光学传递函数曲线图。其中,横坐标为空间频率,
单位为p/mm。纵坐标为光学传递函数的系数。具体地,图2示出了镜头在20℃下,像面高度为0mm、2.5mm和4.9mm,工作波长为8μm时的子午(t)和弧矢(s)调制传递函数曲线。图3示出了镜头在-40℃下,像面高度为0mm、2.5mm和4.9mm,工作波长为8μm至12μm时的子午和弧矢调制传递函数曲线。图4示出了镜头在60℃下,像面高度为0mm、2.5mm和4.9mm,工作波长为8μm至12μm时的子午和弧矢调制传递函数曲线。从图2至图4可以看出,镜头的子午和弧矢调制传递函数曲线较高,镜头的成像质量较好。
[0051]
参照图5,其示出了镜头的场曲图。其中,横坐标表示场曲,单位为mm。纵坐标表示归一化视场。曲线t为子午场曲曲线,曲线s为弧矢场曲曲线。从图5可以看出,镜头的子午场曲值和弧矢场曲值均控制在了-0.1mm至0.1mm的范围内。
[0052]
参照图6,其示出了镜头的畸变图。其中,横坐标表示畸变的百分比值,纵坐标表示归一化视场。从图6可以看出,镜头的畸变小于7%。
[0053]
参照图7,其示出了镜头的像面照度图。其中,横坐标为像高位置,单位为mm。纵坐标为归一化照度。从图7可以看出,镜头的中心照度为1,没有能量损失。镜头的边缘照度大于0.85。因此,镜头的相对照度大于0.85。
[0054]
本技术还提供了一种热像仪,其可以包括上述镜头。具体地,热像仪可以使用非制冷长波红外探测器作为感光元件5。非制冷长波红外探测器的分辨率可以为640
×
512,像素间距可以为12μm。或者,非制冷长波红外探测器的分辨率可以为384
×
288,像素间距可以为17μm。
[0055]
本技术至少具有以下优点:
[0056]
(i)镜头包括第一透镜1、第二透镜2和第三透镜3,使得镜头能够自行适应温度的变化,从而满足光学系统的光焦度、消色差和消热差需求,提升了光学系统的性能。
[0057]
(ii)镜头采用光学被动式的设计而无需增加调焦机构,使得镜头在具有较高的可靠性的同时具有较低的成本。
[0058]
(iii)镜头具有较大的视场角,使得搭载该镜头的设备能够具有较大的视野。
[0059]
(iv)镜头的畸变较小,使得感光元件5能够获得准确的信息。
[0060]
应当理解,上述实施方式仅是示例性的,不用于限制本技术。本领域技术人员可以在本技术的教导下对上述实施方式做出各种变型和改变,而不脱离本技术的范围。
[0061]
应当理解,空气间隔不限于透镜之间的间隙填充有空气,透镜之间的间隙可以填充有本领域技术人员所熟知的任何可能的介质。当然,透镜之间的间隙也可以是真空的。
[0062]
应当理解,各透镜不限于具有实施例所给出的参数,也不限于满足实施例所给出的公式。本领域技术人员可以根据需要使镜头具有任何可能的参数,并且满足任意可能的公式。
[0063]
应当理解,各透镜不限于由硫系玻璃制成,其可以由本领域技术人员所熟知的任何可能的材料制成。例如,各透镜可以由硒化锌晶体、硅单晶、锗单晶或氟化物等制成。各透镜不限于由一种材料制成,其也可以为多种材料的组合。
[0064]
应当理解,镜头可以是可拆卸的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。