1.本发明涉及智能控制技术领域,尤其涉及一种风扇控制电路及智能风扇。
背景技术:
2.随着科技的进步,风扇也在逐步智能化,由最初的只能简单的开-关两种功能,逐步改进至可以根据自身需求多档控制风速。虽然可以多档控制风扇的转速,但转速均为厂家出产前设定的,用户无法小范围调整风扇转速,满足不了用户的个人需求。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的在于提供一种风扇控制电路及智能风扇,可精细化调整风扇转速,满足用户个性化需求。
4.本发明的目的之一采用如下技术方案实现:
5.一种风扇控制电路,包括:
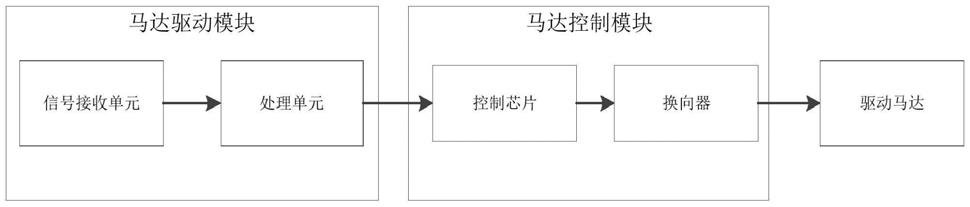
6.马达驱动模块,包括互相连接的信号接收单元与处理单元,所述信号接收单元用于接收遥控信号并将所述遥控信号传输至处理单元,所述处理单元用于根据所述遥控信号输出控制信号;
7.马达控制模块,与所述马达驱动模块连接,所述马达控制模块用于根据所述马达驱动模块的控制信号控制驱动马达;所述马达控制电路包括换向器与控制芯片,所述控制芯片通过换向器控制所述驱动马达的转速;所述换向器设置有桥式控制单元,所述桥式控制单元包括多组开关晶体管,开关晶体管连接驱动马达的对应线圈,通过开关晶体管控制所述驱动马达的线圈,以控制风扇的转速。
8.进一步地,所述马达驱动模块包括电源驱动单元,所述电源驱动单元包括开关管q1与变压器、整流二极管d1,所述开关管q1的输入端连接所述处理单元的输出端,所述开关管q1的漏极通过变压器的初级绕组,所述变压器的磁极绕组连接所述整流二极管d1的正极。
9.进一步地,每组所述开关晶体管均包括第一二极管与第二二极管,且所述第一二极管的栅极连接所述控制芯片的输出端,所述第一二极管的源极经电阻接地,所述第一二极管的漏极连接所述驱动马达线圈的输入端,所述第二二极管的栅极连接所述控制芯片的输出端,所述第二二极管的源极连接控制电源端,所述第二二极管的漏极连接所述驱动马达线圈的输入端。
10.进一步地,每个所述第一二极管与第二二极管的漏极与源极并联一续流二极管。
11.进一步地,所述处理单元设置有mcu,所述mcu连接所述信号接收单元与控制芯片,所述mcu用于接收所述信号接收单元的遥控信号并输出pwm信号至控制芯片。
12.进一步地,所述信号接收单元包括蓝牙接收模组或红外接收模组、触控信号接收模块。
13.进一步地,还设置有语音模组与消毒模组,所述语音模组连接所述处理单元,所述
语音模组用于播报状态信息;所述消毒模组连接所述处理单元,所述消毒模组包括一杀菌紫外线二极管,所述杀菌紫外线二极管的栅极连接所述处理单元,所述杀菌紫外线二极管的漏极连接电源端,所述杀菌紫外线二极管的源极接地。
14.进一步地,所述控制芯片包括与gpm32单片机与ln8343芯片,所述gpm32单片机输出pwm信号至ln8343芯片;所述处理单元采用cx8969芯片。
15.本发明的目的之二采用如下技术方案实现:
16.一种智能风扇,包括如上任意一项所述的风扇控制电路。
17.相比现有技术,本发明的有益效果在于:
18.本发明提供了一种风扇控制电路及智能风扇,所述马达驱动模块接收外部的遥控信号,并将所述遥控信号转化成控制信号,所述马达控制模块接收所述控制信号并根据所述控制信号通过开关晶体管导通状态控制驱动马达的线圈,精细化调整马达线圈的磁场方向,控制风扇的转速,满足用户的个人需求。
附图说明
19.图1为本发明所提供的风扇控制电路的结构示意图;
20.图2为本发明所提供的风扇控制电路的马达驱动模块的结构示意图;
21.图3为本发明所提供的风扇控制电路的降压模组的结构示意图;
22.图4为本发明所提供的风扇控制电路的马达驱动模块的信号接收单元与处理单元电路原理图;
23.图5为本发明所提供的风扇控制电路的马达控制模块的电路原理图;
24.图6为本发明所提供的风扇控制电路的马达控制模块的另一电路原理图;
25.图7为本发明所提供的风扇控制电路的语音模组与消毒模组的电路原理图。
具体实施方式
26.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
27.如图1所示,本发明提供了一种风扇控制电路,精细化调整马达线圈合成的磁场方向,可小范围调整风扇的转速,满足用户个性化需求。
28.具体的,所述风扇控制电路包括马达驱动模块,马达控制模块,所述马达驱动模块连接所述马达控制模块,所述马达控制模块连接驱动马达。所述马达驱动模块包括互相连接的信号接收单元与处理单元,所述信号接收单元用于接收遥控信号并将所述遥控信号传输至处理单元,所述处理单元用于根据所述遥控信号输出控制信号。所述马达控制模块用于所述马达控制电路用于根据所述马达驱动模块的控制信号控制驱动马达;所述马达控制电路包括换向器与控制芯片,所述控制芯片通过换向器控制所述驱动马达的转速;所述换向器设置有桥式控制单元,所述桥式控制单元包括多组开关晶体管,开关晶体管连接驱动马达的对应线圈,通过开关晶体管控制所述驱动马达的线圈。
29.如图2、3所示,所述马达驱动模块包括电源驱动单元,所述电源驱动单元采用反激式开关电源,设置有降压模组,所述降压模组采用eup3484d降压芯片,支持宽范围电压的输
入。所述电源驱动单元包括整流模组、开关管q1与变压器、整流二极管d1,所述整流模组连接电源输入端,整流模组的输出端连接变压器,所述开关管q1的输入端连接所述处理单元的输出端,所述开关管q1的漏极通过变压器的初级绕组,所述变压器的磁极绕组连接所述整流二极管d1的正极。当开关管q1导通时,所述变压器初级绕组的感应电压为上正下负,整流二极管d1处于截止状态,在变压器的初级绕组中存储能量。当开关管q1截止时,变压器初级绕组存储的电能通过次级绕组,流至整流二极管d1整流,再通过电容c5、电容c7滤波后输出。
30.如图4所示,所述马达驱动模块还包括信号接收单元与处理单元,所述信号接收单元接收外部遥控信号,并将所述遥控信号传输至处理单元,所述处理单元根据所述遥控信号输出控制信号。所述信号接收单元包括蓝牙模组或者红外接收模组、触控接收模组,用户可以通过手机的蓝牙模块与蓝牙接收模组连接,以发出蓝牙信号,或者通过红外遥控器发出红外遥控信号,通过风扇外壳设置触控选择面板或旋转按钮发出遥控信号。通过遥控器发出特定的数字信号,信号接收单元接收到数字信号后传输至处理单元,处理单元采用cx8969芯片,该芯片连接所述马达控制单元,所述处理单元处理后输出控制信号至马达控制模块。
31.所述马达控制模块根据所述马达驱动模块的控制信号控制所述驱动马达。所述马达控制模块采用二相导通星形流状态控制方式,包括换向器与控制芯片。控制芯片控制所述换向器切换所述驱动马达的状态。如图5、6所示,所述控制芯片gpm32单片机与ln8343芯片,所述gpm32单片机连接所述处理单元,接收处理单元发出的控制信号,并将其转化成pwm信号输出至ln8343芯片。ln8343芯片控制所述换向器,调整所述驱动马达的转速。所述换向器内设置有3组开关晶体管,开关晶体管q1、开关晶体管q2、开关晶体管q3,每组开关晶体管连接对应驱动马达的线圈的输入端。
32.每组所述开关晶体管均包括第一二极管与第二二极管,且所述第一二极管的栅极连接所述控制芯片的输出端,所述第一二极管的源极经电阻接地,所述第一二极管的漏极连接所述驱动马达线圈的输入端,所述第二二极管的栅极连接所述控制芯片的输出端,所述第二二极管的源极连接控制电源端,所述第二二极管的漏极连接所述驱动马达线圈的输入端。且在每个所述第一二极管与第二二极管的源极与漏极并联一续流二极管,为其所在的开关晶体管关断时提供续流通路。
33.驱动马达设置有u、v、w三组线圈,二相通是指任何是后都有两个二极管管导通。当开关晶体管q1-d2与开关晶体管q2-d1导通时,电流由w组线圈进由v组线圈出,两组线圈形成磁场的方向向上,规定此时的磁场方向为0度,转子旋转角度为0度。当开关晶体管q1-d2与开关晶体管q3-d1导通时,电流由w组线圈进u组线圈出,两组线圈形成的磁场方向顺时针转到60度,转子也随之转到60度。当转子转到60度时,开关晶体管q2-d2与开关晶体管q3-d1导通时,电流由v组线圈进u组线圈出,形成的磁场方向顺时针转到120度,转子也随之转到120度。当转子转到120度时,开关晶体管q2-d2与开关晶体管q1-d1导通时,电流由v组线圈进w组线圈出,形成的磁场方向顺时针转到180度,转子也随之转到180度。当转子转到180度时,开关晶体管q3-d2与开关晶体管q1-d1导通时,电流由u组线圈进w组线圈出,形成的磁场方向顺时针转到240度,转子也随之转到240度。当转子转到240度时,开关晶体管q3-d2与开关晶体管q2-d1导通时,电流由u组线圈进v组线圈出,形成的磁场方向顺时针转到300度,转
子也随之转到300度。当转子转到300度时,将回到初始状态,开关晶体管q1-d2与开关晶体管q2-d1导通,电流由w组线圈进v组线圈出,磁场方向转回0度,转子也转回0度,完成一周旋转。通过调整所述线圈形成的磁场方向,进而控制驱动马达的转速。
34.进一步地,如图7所示,还设置有语音模组与消毒模组,所述语音模组与消毒模组均连接所述处理单元,所述语音模组用于播报所述状态信息。而所述消毒模组连接所述处理单元,所述消毒模组包括一杀菌紫外线二极管,所述杀菌紫外线二极管的栅极连接所述处理单元,所述杀菌紫外线二极管的漏极连接电源端,所述杀菌紫外线二极管的源极接地。用户可以通过红外遥控器或者蓝牙模组发出消毒信号,由处理单元控制所述消毒模组进行紫外线消毒。
35.本电路通过所述马达驱动模块接收外部的遥控信号,并将所述遥控信号转化成控制信号,所述马达控制模块接收所述控制信号并根据所述控制信号通过开关晶体管导通状态控制驱动马达的线圈,精细化调整马达线圈的磁场方向,控制风扇的转速,满足用户的个人需求。
36.基于相同的发明思想,本技术还提供了一种智能风扇,所述智能风扇包括上述一种风扇控制电路,所述风扇控制电路的驱动马达连接出风装置,通过风扇控制电路调整所述出风装置的转速。该智能风扇可以根据用户的个人需求调整转速,自带自然风模式,且支持宽电压输出,适用于多种使用场所,满足用户的个性化需求。
37.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。