1.本发明属于目标平台识别技术领域,具体涉及一种基于星上的实时舰船目标平台动态关联识别方法。
背景技术:
2.目前我国电子侦察卫星运行过程中可以形成天基广域持续侦察态势,对重点关注的海上舰船目标进行长时间段动态监视,而基于星上的实时舰船目标平台动态关联识别技术是实现该功能的核心技术,因而研究意义重大。对该技术的研究,一方面可以针对重点关注目标实现跨多个时间段的运动轨迹追踪,另一方面可以为多个目标运动态势库的构建提供重要技术支撑,从而有利于更高精度的目标平台识别。
3.目前对基于星上电子信息的舰船目标识别的研究较多,对目标关联的方法主要有两个方向,第一个是依据目标属性信息的关联方法,第二个是依据目标位置信息的关联方法。其中,依据目标属性的关联方法的核心思想是比较目标属性的匹配度来作为关联判决。目标的信息除了位置、运动信息以外,还有电磁传感器探测到的目标辐射源电磁特性信息,因此利用属性信息可以解决部分目标关联中位置信息的不确定性问题。而依据目标位置信息的关联方法是一种直观的,依据空间位置信息的相似性进行判别的关联方法。位置信息一般指目标所处的方位及运动状态。根据应用场合、观测数据特性及关联目标个数,通常有最近邻算法、多假设跟踪算法等方法。
4.虽然已有众多目标关联领域的大量研究和成果,但是基于电子信息的舰船目标关联研究仍然有很多困难。主要表现在:
5.首先,电磁探测信号数据比较密集,短时间获得同一目标的多次观测数据,且存在虚假目标,因此,如何从包含虚警的海量观测数据中提取有效目标面临很大挑战;
6.其次,探测数据对目标身份的判决存在不确定性,这种不确定性会导致舰船目标的错误关联;属性信息自身的不确定性,导致目标关联不准确等。
7.实际应用中,不同的目标平台由于遂行任务和功能的不同,装备的雷达或通信辐射源不尽相同。对于特定的目标平台来说其配属的雷达或通信辐射源具有一定的规律。利用这种规律可以将雷达或通信辐射源的识别结果更准确地转化为对目标平台的判别。同时,卫星探测辐射源电磁信息的时间是不连续的且时间间隔较为随机,但是对于时间间隔不是很长的目标,其运动轨迹有一定的可关联性。在基于已探知舰船目标的位置信息进行初步快速关联的基础上,再利用关联目标的辐射源配置信息进行更精确识别或进行人工确认,以一种递推学习的方式不断进行动态关联识别。从而避免直接利用特征信息关联过程中,平台关联决策矩阵维数过大,算法涉及的矩阵运算量巨大,导致关联平台识别的实时处理性能变差的问题,或者平台配置知识颗粒度太粗,关联识别的准确性下降的问题。
技术实现要素:
8.本发明的目的在于提供一种基于星上的实时舰船目标平台动态关联识别方法,以
解决上述背景技术中提出的问题。
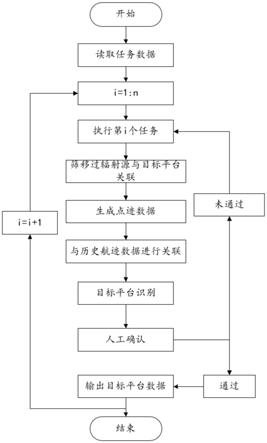
9.一种基于星上的实时舰船目标平台动态关联识别方法,其包括:
10.步骤一、获取第i(i=1,2,3
……
n)个目标平台关联识别任务;
11.步骤二、读取第i个任务的配置数据,所述配置数据包括第i个任务针对的目标平台辐射源配置信息和的历史航迹数据;
12.步骤三、实时获取若干辐射源数据;
13.步骤四、根据目标平台辐射源配置信息从步骤三中筛选出与目标平台匹配的辐射源数据,并以此生成第i个任务的点迹数据;
14.步骤五、将点迹数据与历史航迹数据关联,进行目标平台识别;
15.步骤六、人工确认识别结果,若确认识别错误,则返回步骤一重新识别;若确认识别正确,则转入步骤七;
16.步骤七、输出目标平台的数据并对历史航迹数据进行更新;
17.步骤八、重复步骤一~步骤七,执行第i 1、i 2
……
n个任务至结束。
18.进一步,所述步骤三的具体过程包括:
19.将第i个任务对应的数据存储在一个二维数组h中,二维数组h的每一行对应每一个实时探测的辐射源,列对应每个辐射源的序号、任务编号、型号、位置、时间、平台型号。
20.进一步,所述步骤四的具体过程包括:
21.s1:根据第i个任务的目标平台的辐射源配置信息,将多个辐射源对应该目标平台进行关联,生成新二维数组h;新二维数组h的每一行对应原来的每个辐射源,列对应每个辐射源的序号、关联平台的序号、辐射源型号、辐射源位置、时间、关联平台型号;
22.s2:根据新二维数组h生成第i个任务的目标平台在相应时间的点迹。
23.进一步,所述步骤五的具体过程包括:
24.p1:根据目标平台的历史航迹数据设置舰船运动速度阈值vmax;
25.p2:分析第i个任务的辐射源点迹轨迹,按对应时间间隔内的位置符合舰船正常运动速度的原则进行关联。
26.进一步,所述p2中,具体选择过程如下:
27.根据间隔时间为δt的目标平台的经纬度距离,估算对应时间间隔内目标的速度v
bl
,如下式所示:
[0028][0029]
其中,b1、b2分别为t1、t2时刻目标平台的位置经度,l1、l2分别为t1、t2时刻目标平台的位置纬度,δt=t1-t2;
[0030]
若v
bl
<vmax,则关联成功;若v
bl
>vmax,则关联失败。
[0031]
进一步,步骤七中,输出的目标平台的数据包括新二维数组h中的辐射源数量、目标平台位置、目标平台时间。
[0032]
与现有技术相比,本发明的有益效果是:
[0033]
第一、本方法针对目标平台种类繁多情形下直接利用特征信息关联过程中处理运算量过大无法实现快速自动处理问题,提出了一种基于星上的实时舰船目标平台动态关联识别方法,基于已探知舰船目标的位置信息进行初步快速关联,实现目标平台种类繁多情
形下的平台快速自动识别处理;
[0034]
第二、本发明中,将实时获取的包含目标平台辐射源配置信息的任务数据和已生成的动态关联数据作为输入,自动识别目标平台,并实时更新平台关联航迹;
[0035]
第三、基于星上的实时舰船目标平台动态关联识别方法支持单任务输入,也支持多任务输入。对于单个任务可以将不同辐射源和不同平台进行关联,对于多任务可以将不同平台和动态平台关联航迹进行关联;
[0036]
第四、本发明通过目标平台辐射源配置信息和的历史航迹数据,实现对当前任务目标平台的关联识别,解决了平台关联决策矩阵维数过大,算法涉及的矩阵运算量巨大,导致的实时处理性能变差、平台配置知识颗粒度太粗,关联识别的准确性下降的问题,提高了识别效率与有效性。
附图说明
[0037]
图1为本发明的一种基于星上的实时舰船目标平台动态关联识别方法的流程图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
请参阅图1,一种基于星上的实时舰船目标平台动态关联识别方法,其包括:
[0040]
步骤一、获取第i(i=1,2,3
……
n)个目标平台关联识别任务;
[0041]
步骤二、读取第i个任务的配置数据,所述配置数据包括第i个任务针对的目标平台辐射源配置信息和的历史航迹数据;
[0042]
步骤三、实时获取若干辐射源数据;具体包括:
[0043]
将第i个任务对应的数据存储在一个二维数组h中,二维数组h的每一行对应每一个实时探测的辐射源,列对应每个辐射源的序号、任务编号、型号、位置、时间、平台型号。
[0044]
步骤四、根据目标平台辐射源配置信息从步骤三中筛选出与目标平台匹配的辐射源数据,并以此生成第i个任务的点迹数据;具体过程包括:
[0045]
s1:根据第i个任务的目标平台的辐射源配置信息,将多个辐射源对应该目标平台进行关联,生成新二维数组h;新二维数组h的每一行对应原来的每个辐射源,列对应每个辐射源的序号、关联平台的序号、辐射源型号、辐射源位置、时间、关联平台型号;
[0046]
s2:根据新二维数组h生成第i个任务的目标平台在相应时间的点迹。
[0047]
步骤五、将点迹数据与历史航迹数据关联,进行目标平台识别;具体过程包括:
[0048]
p1:根据目标平台的历史航迹数据设置舰船运动速度阈值vmax;
[0049]
p2:分析第i个任务的辐射源点迹轨迹,按对应时间间隔内的位置符合舰船正常运动速度的原则进行关联。
[0050]
其中,步骤p2中,具体选择过程如下:
[0051]
根据间隔时间为δt的目标平台的经纬度距离,估算对应时间间隔内目标的速度v
bl
,如下式所示:
[0052][0053]
其中,b1、b2分别为t1、t2时刻目标平台的位置经度,l1、l2分别为t1、t2时刻目标平台的位置纬度,δt=t1-t2;
[0054]
若v
bl
<vmax,则关联成功;若v
bl
>vmax,则关联失败。
[0055]
步骤六、人工确认识别结果,若确认识别错误,则返回步骤一重新识别;若确认识别正确,则转入步骤七;
[0056]
步骤七、输出目标平台的数据并对历史航迹数据进行更新;输出的目标平台的数据包括但不限于新二维数组h中的辐射源数量、目标平台位置、目标平台时间。
[0057]
步骤八、重复步骤一~步骤七,执行第i 1、i 2
……
n个任务至结束。
[0058]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。