一种基于j2摄动主动利用的编队构形重构控制方法
技术领域
1.本发明涉及卫星编队构形控制领域,尤其涉及一种基于j2摄动主动利用的编队构形重构控制方法。
背景技术:
2.卫星编队构形重构控制是编队任务可实现灵活性、鲁棒性的重要保障技术。传统的针对卫星编队构形的解析脉冲重构控制方法都是基于两体模型假设下提出的,但是在地球非球形j2摄动影响下,相对轨道要素是会发生摄动变化的。通过合理的利用j2摄动对编队构形参数的影响,智能利用摄动影响,最大可能利用自然摄动影响,可实现省燃料的编队构形重构控制。
技术实现要素:
3.为了解决上述技术问题,本发明的目的是提供一种基于j2摄动主动利用的编队构形重构控制方法,实现比传统解析脉冲重构更省燃料消耗的编队构形重构控制。
4.本发明所采用的第一技术方案是:一种基于j2摄动主动利用的编队构形重构控制方法,包括以下步骤:
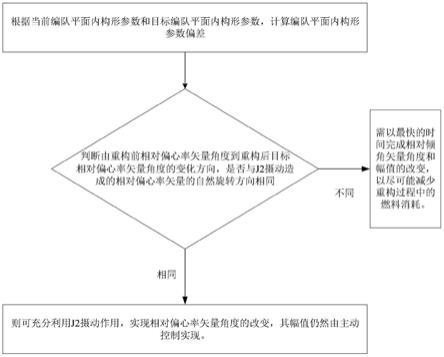
5.s1、根据重构前编队平面内构形参数和重构后编队平面内构形参数,计算编队平面内构形参数偏差;
6.s2、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量旋转方向相同,控制相对偏心率矢量幅值,基于j2摄动完成角度变化;
7.s3、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量旋转方向相反,以时间为优先,完成平面内构型重构;
8.s4、根据重构前编队平面外构形参数和重构后编队平面外构形参数,确定利用j2摄动进行省燃料平面外构形重构的策略;
9.s5、脉冲控制造成主动偏置的主从星轨道倾角差,基于j2摄动改变相对倾角矢量y轴分量,完成平面外构型重构。
10.进一步,所述编队平面内构形参数偏差包括编队辅星与主星半长轴的差、相对偏心率矢量、相对倾角矢量和编队绕飞中心沿航迹向偏置距离。
11.进一步,在j2项摄动影响下,相对偏心率矢量δe的长期变化为:
[0012][0013]
上式中,δe为相对偏心率矢量的幅值,为相对偏心率矢量的初相位,为相对偏心率矢量的初相位,为相对偏心率矢量在j2项摄动下的旋转角速度。
[0014]
进一步,根据相对偏心率矢量在j2项摄动下的旋转角速度得到j2摄动影响造成的相对偏心率矢量旋转方向,相对偏心率矢量在j2项摄动下的旋转角速度的公式表示如下:
[0015][0016]
上式中,te为δe在j2摄动下的旋转周期,t为卫星轨道周期,为地球赤道半径,a为轨道半长轴,i为轨道倾角,j2为地球扁率摄动系数。
[0017]
进一步,在j2项摄动影响下,相对倾角矢量δi的长期变化为:
[0018][0019]
上式中,δi
x
和δiy分别为相对倾角矢量δi的x和y向分量,δi
x0
表示重构开始时刻的相对倾角矢量δi的x向分量,δi
y0
表示重构开始时刻的相对倾角矢量δi的y向分量。
[0020]
进一步,j2摄动改变相对倾角矢量y轴分量的计算公式如下:
[0021][0022]
上式中,δi为编队卫星轨道倾角差。
[0023]
进一步,所述脉冲控制造成主动偏置的主从星轨道倾角差的计算公式如下:
[0024][0025]
上式中,t为卫星轨道周期,a为轨道半长轴,δiy为重构需要改变的相对倾角矢量δi在y轴的投影,re为地球赤道半径,ic表示主星轨道倾角。
[0026]
本发明方法及系统的有益效果是:本发明通过主动利用j2摄动影响,分别给出了编队构形平面内重构和平面外重构的j2摄动主动利用策略,可实现比传统基于两体模型的编队解析脉冲重构更低的燃料消耗目标。
附图说明
[0027]
图1是本发明一种基于j2摄动主动利用的编队平面内构形重构控制方法的步骤流程图;
[0028]
图2是本发明一种基于j2摄动主动利用的编队平面外构形重构控制方法的步骤流程图;
[0029]
图3是本发明具体实施例j2摄动下相对偏心率矢量的长期变化示意图。
具体实施方式
[0030]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0031]
参照图1和图2,本发明提供了一种基于j2摄动主动利用的编队构形重构控制方法,该方法包括以下步骤:
[0032]
s1、根据重构前编队平面内构形参数δα
current
=(δa
current
,δe
current
,δλ
current
)
t
和重构后编队平面内构形参数δα
target
=(δa
target
,δe
target
,δλ
target
)
t
,计算编队平面内
构形参数偏差δα
error
=(δa
error
,δe
error
,δλ
error
)
t
;
[0033]
具体地,其中δa=a
deputy-a
chief
为编队辅星与主星半长轴的差,δe=(δe
x
,δey)
t
=(edcosω
d-eccosωc,edsinω
d-ecsinωc)
t
为相对偏心率矢量,δλ=δu δωcosic为编队绕飞中心沿航迹向偏置距离。实际上半长轴差和绕飞中心沿航迹向偏置距离针对主动摄动和传统重构方法都需要,但是这个发明中主要解决的是相对偏心率矢量和相对倾角矢量省燃料重构方法,另外两个参数使得整个重构过程完整,这两个参数的重构控制用传统的重构方法就可以了。
[0034]
s2、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量角度旋转方向相同,控制相对偏心率矢量幅值,基于j2摄动完成角度变化;
[0035]
s3、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量旋转方向相反,以时间为优先,完成平面内构型重构;
[0036]
具体地,j2摄动下相对偏心率矢量的长期变化示意图参照图3,判断的方向与的方向是否相同,如果相同,则充分利用j2摄动作用,实现相对偏心率矢量角度的改变,其幅值仍然由主动控制实现;如果不同,则需以最快的时间完成相对倾角矢量角度和幅值的改变,尽可能减少重构过程中的燃料消耗,使用的是传统的燃料最优三脉冲重构方法。
[0037]
s4、根据重构前编队平面外构形参数和重构后编队平面外构形参数,确定利用j2摄动进行省燃料平面外构形重构的策略;
[0038]
具体地,根据当前平面外编队构形参数δi
current
和目标平面外编队构形参数δi
target
,计算平面外编队构形参数偏差δi
error
;
[0039]
在j2项摄动影响下,相对倾角矢量δi的长期变化为:
[0040][0041]
其中,δi
x
和δiy分别为相对倾角矢量δi的x和y向分量,δi
x0
表示重构开始时刻的相对倾角矢量δi的x向分量,δi
y0
表示重构开始时刻的相对倾角矢量δi的y向分量。受j2项摄动影响,δi会产生长期漂移,δiy的线性漂移为:
[0042][0043]
其中δi为编队卫星轨道倾角差。由上式可知,在j2项摄动影响下,相对倾角矢量y轴分量会产生长期漂移。故为充分利用j2项摄动影响,针对较大幅度的改变相对倾角矢量y轴分量且重构前后要求相对倾角差为零的情况,可通过事先主动偏置相对倾角差δi的方法,进而实现轨道平面外重构的摄动智能应用。当平面外构形重构时间足够大时,通过主动偏置相对倾角差δi的方法可以节省燃料消耗,但是存在一个问题,当时间大于多少,通过主动偏置相对倾角差δi的方法可以节省燃料消耗,下面就给出了重构时间的下限。
[0044]
s5、脉冲控制造成主动偏置的主从星轨道倾角差,基于j2摄动改变相对倾角矢量y轴分量,完成平面外构型重构。
[0045]
假设利用一次平面外脉冲,造成辅星同主星轨道倾角存在差异,在总的重构时间t内,分别计算造成轨道倾角差所需的平面外脉冲量和由于倾角差而造成的相对倾角矢量y向分量δiy的增加量而所造成的速度脉冲减小量通过比较和的大小,进而可以确定当重构时间t大于多少时,采用智能摄动应用的方法,可以节省燃料。
[0046]
利用平面外速度脉冲改变倾角差的公式为:
[0047][0048]
则仅改变倾角需速度脉冲可由下式计算:
[0049]
其中cosu=1
[0050]
则考虑到重构前和重构后编队都是等倾角编队,则用于改变和消除平面倾角差的速度脉冲为:
[0051][0052]
考虑到通过偏置双星轨道倾角差,在总的重构时间t内,利用j2摄动可造成的倾角矢量δiy的变化量可计算为:
[0053][0054]
则基于摄动方法可节省燃料的条件为:
[0055][0056][0057]
进而可以得到
[0058][0059]
即当重构时间t满足上式时,基于j2摄动智能利用的方法可节省平面外重构中的燃料消耗。
[0060]
s204、当确定可利用智能摄动节省燃料后,如何确定倾角偏置量。当重构控制时间满足时,则这时采用偏置倾角的方法,利用平面外自然摄动的影响可节省重构中的燃料消耗。下面给出当给定需完成的平面外构形改变量后,这里给出轨道倾角偏置量δi的确定方法。
[0061]
令轨道平面外由相对升交点赤经差所决定的平面外构形尺度为aδiy,重构时间为t,则需要偏置的轨道倾角δi为:
[0062][0063]
其中t为卫星轨道周期,a为轨道半长轴,δiy为重构需要改变的相对倾角矢量δi在y轴的投影,re为地球赤道半径,ic表示主星轨道倾角。
[0064]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。