技术特征:
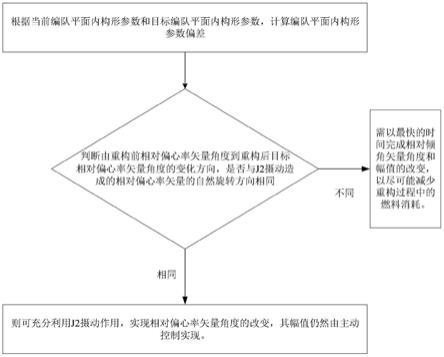
1.一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,包括以下步骤:s1、根据重构前编队平面内构形参数和重构后编队平面内构形参数,计算编队平面内构形参数偏差;s2、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量旋转方向相同,控制相对偏心率矢量幅值,基于j2摄动完成角度变化;s3、判断到重构前后相对偏心率矢量角度变化方向同j2摄动影响造成的相对偏心率矢量旋转方向相反,以时间为优先,完成平面内构型重构;s4、根据重构前编队平面外构形参数和重构后编队平面外构形参数,计算编队平面外构形参数偏差;s5、脉冲控制造成主动偏置的主从星轨道倾角差,基于j2摄动改变相对倾角矢量y轴分量,完成平面外构型重构。2.根据权利要求1所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,所述编队平面内构形参数偏差包括编队辅星与主星半长轴的差、相对偏心率矢量、相对倾角矢量和编队绕飞中心沿航迹向偏置距离。3.根据权利要求2所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,在j2项摄动影响下,相对偏心率矢量δe的长期变化为:上式中,δe为相对偏心率矢量的幅值,为相对偏心率矢量的初相位,为相对偏心率矢量的初相位,为相对偏心率矢量在j2项摄动下的旋转角速度。4.根据权利要求3所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,根据相对偏心率矢量在j2项摄动下的旋转角速度得到j2摄动影响造成的相对偏心率矢量旋转方向,相对偏心率矢量在j2项摄动下的旋转角速度的公式表示如下:上式中,t
e
为δe在j2摄动下的旋转周期,t为卫星轨道周期,为地球赤道半径,a为轨道半长轴,i为轨道倾角,j2为地球扁率摄动系数。5.根据权利要求4所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,在j2项摄动影响下,相对倾角矢量δi的长期变化为:上式中,δi
x
和δi
y
分别为相对倾角矢量δi的x和y向分量,δi
x0
表示重构开始时刻的相对倾角矢量δi的x向分量,δi
y0
表示重构开始时刻的相对倾角矢量δi的y向分量。6.根据权利要求5所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,j2摄动改变相对倾角矢量y轴分量的计算公式如下:
上式中,δi为编队卫星轨道倾角差。7.根据权利要求6所述一种基于j2摄动主动利用的编队构形重构控制方法,其特征在于,所述脉冲控制造成主动偏置的主从星轨道倾角差的计算公式如下:上式中,t为卫星轨道周期,a为轨道半长轴,δi
y
为重构需要改变的相对倾角矢量δi在y轴的投影,r
e
为地球赤道半径,i
c
表示主星轨道倾角。
技术总结
本发明公开了一种基于J2摄动主动利用的编队构形重构控制方法,包括:计算编队平面内构形参数偏差;判断到重构前后相对偏心率矢量角度变化方向同J2摄动影响造成的相对偏心率矢量旋转方向相同,控制相对偏心率矢量幅值,基于J2摄动完成角度变化;判断到重构前后相对偏心率矢量角度变化方向同J2摄动影响造成的相对偏心率矢量旋转方向相反,以时间为优先,完成平面内构型重构;确定利用J2摄动进行省燃料平面外构形重构的策略;脉冲控制造成主动偏置的主从星轨道倾角差,基于J2摄动改变相对倾角矢量y轴分量,完成平面外构型重构。通过使用本发明,实现比传统解析脉冲重构更省燃料消耗的编队构形重构控制。本发明可广泛应用于卫星编队构形控制领域。编队构形控制领域。编队构形控制领域。
技术研发人员:王继河 张锦绣
受保护的技术使用者:中山大学
技术研发日:2021.12.13
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。