1.本发明属于无线电技术领域,具体涉及一种空间谱测向方法。
背景技术:
2.利用无线电测向进行航空救生的方法已经广泛应用于海上遇险、地震等灾害场景下的人员搜救,能够快速实现遇险人员的方位确定和救助支援。传统的无线电测向方法是利用阵列天线接收无线电信号,根据不同天线阵元接收到的电参数如幅度、频率或相位等,采用特定的测向算法求出目标的方位。
3.在航空救生等应用中,目前采用的是传统单机搜救系统,单机搜救系统可以独立探测求救目标的方位等信息,进而结合几何约束条件确定求救目标准确位置。单机搜救系统结构简单、灵活机动,但是存在很多弊端,比如测量误差较大、观测信息不全面、容易遭受通信干扰等,导致搜救效果不佳。多机协同搜救系统在搜救过程中从不同的角度对求救目标进行协同探测并对信息进行融合处理,不仅能提高系统的生存能力,而且能保证系统在尽可能全面、准确和及时的信息支持下将测向搜救效果发挥到最佳水平。在这种情况下,对实现基于特定非等间距阵列结构的高精度多机协同搜救系统进行研究具有重要意义和应用价值。
技术实现要素:
4.为了克服现有技术的不足,本发明提供了一种基于特定非等间距阵列结构的高精度空间谱测向方法,该方法首先根据通用飞机给定的天线建立非等间距阵列测向模型;再针对搜救系统中不同搜救信号频率提出两种测向方案,包括多天线非等间距线阵测向方案和双天线互质阵列测向方案,并完成测向方案中天线阵元的确定;最后进行测向误差校正,对测向过程中的通道幅相误差进行分析,采用单辅助信源校正算法进行误差的校正,提高搜救过程中的测向精度。本发明采用高精度的空间谱测向算法进行遇险人员的快速救助和支援,为多机协同测向搜救的紧急救援方案提供了技术依据。
5.本发明解决其技术问题所采用的技术方案包括如下步骤:
6.步骤1:根据飞机天线阵列结构,由给定的多阵元特定非等间距天线阵列,计算天线阵元间距;
7.步骤2:根据步骤1得到的天线阵元间距构建多天线非等间距线阵测向方案和双天线互质阵列测向方案;
8.所述多天线非等间距线阵测向方案为在天线阵元中选取至少5个阵元,构成非等间距阵列,采用高分辨率的music算法进行多天线测向;
9.所述双天线互质阵列测向方案为选取四个阵元,组成两个两天线阵列,根据互质阵列测向原理进行双天线测向;
10.步骤3:对测向过程中的通道幅相误差特性进行分析,利用单辅助信源校正算法进行误差校正,确定求救目标方位,提高搜救过程中的测向精度。
11.进一步地,所述双天线互质阵列测向方案具体如下:
12.在测向过程中每个两天线阵列的阵元间距d=mλ/2,两个两天线阵列的阵元间距的m取值互为质数,阵列的方向矢量表示为:
[0013][0014]
其中m1~mn分别表示第1到n个天线阵列的m的取值,a(θ)为信号真实入射角θ的方向矢量;
[0015]
当两个天线阵列间存在角度模糊时:
[0016][0017]
其中θ表示真实入射角,θ
′
表示模糊角;
[0018]
在式(2)中,kn的取值为整数,mn的取值为正整数,阵列测角范围为(-90
°
,90
°
),sinθ的范围为(-1,1);所以的取值范围为(-2,2),有kn《mn个取值,当mn互为质数时,所以当不同阵列的阵元间距互为质数时,sinθ-sinθ'=0,两个阵列测向结果均出现谱峰值,不存在角度模糊现象,从而实现互质阵列下的精确测向。
[0019]
进一步地,所述步骤3具体如下:
[0020]
考虑到通道幅相误差g,天线阵列的导向矢量改变为a为天线阵列理想导向矢量;阵列的输出数据协方差矩阵为:
[0021][0022]
其中,x(t)是m
×
1维矩阵,代表阵列输出的快拍数据矢量;n(t)是m
×
1维矩阵,代表阵列的噪声数据矢量;s(t)是n
×
1维矩阵,代表空间来波信号矢量;a是m
×
n维矩阵,代表空间阵列的流型矩阵,e[.]表示数学期望;
[0023]
假设通道阵列仅存在幅度误差,通道数量为m,设幅度误差分别为阵列误差矩阵表示为阵列的输出数据协方差矩阵变为:
[0024][0025]
其中,rs=e[s(t)s(t)h],代表阵列信号的协方差矩阵,σ
n2
代表噪声功率;
[0026]
进行m个特征值分解,将解算得到的m个特征值按非递减顺序排列并且记为λ1,λ2,
…
,λm,对其进行归一化得到归一化特征值η1,η2,
…
,ηm:
[0027][0028]
其中表示。。。;
[0029]
当阵列误差矩阵g未知且通道幅度误差存在时,空间谱函数转化为:
[0030][0031]
其中,un表示噪声子空间;
[0032]
当仅有通道幅度误差存在时,天线阵列的空间谱函数最大值点位置不变,只是幅度减小,所以幅度误差不会影响测向的角度,只会影响空间谱谱峰的高度;
[0033]
假设通道阵列仅存在相位误差,通道数量为m,设相位误差分别为[β1β2…
βm],误差矩阵表示为输出数据协方差矩阵为:
[0034][0035]
进行m个特征值分解,求得阵列的信号子空间和噪声子空间,最后当通道相位误差存在时,空间谱函数转化为:
[0036][0037]
当仅有通道相位误差存在时,天线阵列的空间谱函数最大值点位置受相位误差项
的影响,当且仅当相位误差为0时,即sinθ1=sinθ时,空间谱函数达到最大值点;
[0038]
单辅助信源校正算法采用方向信息已知的单个辅助信源对通道误差进行估计;假设阵列通道中幅相误差同时存在,辅助信源校正算法需要在空间中设置位置参数己知的校准信源,假设校准信源的方位角为θc,信源信号为s(t),信号功率为噪声功率为通道存在幅相误差g的情况下,接收的求救目标信号为:
[0039][0040]
接收信号的协方差矩阵为:
[0041][0042]
其中,γ表示伽玛函数;
[0043]
对信号的协方差矩阵进行特征值分解:
[0044][0045]
其中,为特征值对角矩阵,将按照非单调递增的顺序排列,其中为天线阵列的信号子空间,为天线阵列的噪声子空间,通道不存在幅相误差时,与a(θ)张成的列空间等价平行,当通道存在幅相误差g的情况下,与ga(θc)张成的列空间等价平行,所以:
[0046][0047][0048]
其中,k是未知复常数,公式(12)转换为:
[0049][0050]
根据公式(14)知,通道幅相误差为:
[0051][0052]
在测向过程中,根据求得的幅相误差进行校正,进而提升多机协同搜救的测向精
度。
[0053]
本发明的有益效果如下:
[0054]
本发明改善了单机测向系统的探测性能和空间分辨能力,降低了目标信息的模糊度,提升了系统探测的可信度,而且使目标测向精度、目标识别能力等方面均得到明显的改善。本发明的基于特定非等间距阵列结构的高精度多机协同搜救系统结合了空间谱测向算法高分辨力,低延时性的优点。本发明建立测向误差校正模块,提高了现有测向方法搜救过程中的测向精度。
附图说明
[0055]
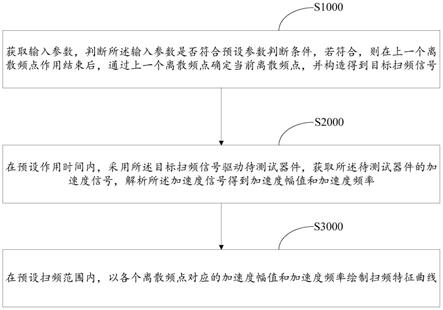
图1是本发明方法流程图。
[0056]
图2是本发明实施例多机协同搜救的测向模型示意图,其中,(a)为多机协同测向搜救示意图,(b)为通用飞机天线阵列结构。
[0057]
图3是本发明实施例多天线非等间距线阵测向结果图和双天线互质阵列测向结果图,其中(a)多天线非等间距线阵测向结果图,(b)双天线互质阵列测向结果图。
[0058]
图4是本发明实施例采用单辅助信源校正算法后的测向结果图,其中,(a)为信号来波方向0
°
gui界面显示,(b)为信号来波方向10
°
gui界面显示。
具体实施方式
[0059]
下面结合附图和实施例对本发明进一步说明。
[0060]
本发明首先针对通用飞机特定阵列结构,建立多机协同搜救的测向模型,针对非等间距天线阵列结构,提出两种非等间距测向方案,然后对测向过程中的通道幅相误差特性进行分析,采用单辅助信源校正算法进行误差的校正,提高搜救过程中的测向精度。如图1所示,具体步骤如下:
[0061]
1、对非等间距阵列的结构进行优化设计可以减少天线阵列的连续阵元数、增大阵列孔径,从而提升测向性能。针对通用飞机天线阵列结构进行分析,根据给定的7阵元的特定非等间距阵列,计算天线阵元间距,建立多机协同搜救的测向模型,具体如下:
[0062]
通用飞机给定的是一个7阵元的特定非等间距阵列,待测信号频率范围为:240mhz-250mhz,阵元分布如图2(b)所示。测向系统的要求是采用给定的任意天线阵元,实现对来波信号的测向。根据公式λ=c/f,其中,c为电磁波的传播速度,数值为3
×
108m/s,假设信号频率为250mhz,则信号波长为120cm,计算天线阵元间距为:
[0063]
阵元1和阵元2的阵元间距为:3600mm
÷
1200mm=3λ;
[0064]
阵元2和阵元3的阵元间距为:750mm
÷
1200mm=0.625λ;
[0065]
阵元3和阵元4的阵元间距为:1050mm
÷
1200mm=0.875λ;
[0066]
阵元4和阵元7的阵元间距为:(3610mm 1500mm)
÷
1200mm=4.258λ;
[0067]
阵元5和阵元6的阵元间距为:(600mm 300mm)
÷
1200mm=0.75λ。
[0068]
测向系统要求对于给定的非等间距阵列,同时能够区分多个来波信号,根据以上阵元间距建立多机协同搜救测向模型。
[0069]
2、选取测向方案进行测向,测向系统要求对于给定的非等间距阵列,同时能够区分多个来波信号。多天线测向方案:选取阵元1,阵元2,阵元3,阵元4以及阵元7构成一个5阵
元的非等间距线阵进行多天线测向;双天线测向方案:选取阵元3号和阵元4号组成两天线阵元组,阵元5号和阵元6号组成两天线阵元组,根据互质阵列测向的原理进行双天线测向,具体如下:
[0070]
(1)多天线非等间距线阵测向
[0071]
music算法能够有效进行测向处理时,需要利用的噪声特征向量个数最少为1,对于构成的5阵元的非等间距线阵,子空间的维度为5,从阵列信号理论角度,可以至多实现对5个来波信号同时的测向,当某一时刻来波信号个数大于5个,music算法将失效。在实际的测向应用场景下,为了保持测向的精度,降低幅硬件的处理要求,一般至多处理三个方向的来波信号。选定的5个阵元组成的非等间距阵列的阵元位置为:dd=[0,3λ,0.625λ,0.875λ,4.258λ]。
[0072]
(2)双天线互质阵列测向
[0073]
根据实际应用场景中高测向精度,低硬件成本的要求,在实际过程中一般使用两个阵元进行测向,在此采用双天线互质阵列测向的方法,互质阵列测向方法就是测向过程中要求测向阵列的阵元间距d=mλ/2,其中m的取值互为质数,具体说明如下,阵列的方向矢量可以表示为:
[0074][0075]
所以存在角度模糊时:
[0076][0077]
在上式中,kn的取值为整数,mn的取值为正整数。阵列测角范围为(-90
°
,90
°
),所以sinθ的范围为(-1,1),所以的取值范围为(-2,2),有|kn|《mn个取值,当mn互为质数时,所以当不同阵列的阵元间距互为质数时,sinθ-sinθ'=0,也就是说不存在角度模糊现象。
[0078]
根据互质阵列测向的原理,选取阵元3号和阵元4号组成两天线阵元组,阵元间距为d=7/8λ,选取阵元5号和阵元6号组成两天线阵元组,阵元间距为d=3/4λ,理论上单独测向时,以上两个阵元组均会出现测向模糊,但是在目标角度处,两个阵列测向结果均出现谱峰值,通过取交集,可以实现解模糊,从而实现互质阵列下的精确测向。
[0079]
3、针对测向过程中的通道幅相误差特性进行分析,利用单辅助信源校正算法进行误差的校正,精确地确定求救目标方位,提高搜救过程中的测向精度,具体如下:
[0080]
通道幅相误差与信号的来波方向无关,它是一种复增益误差包括幅度误差以及相位误差。考虑到通道幅相误差g,天线阵列的导向矢量改变为阵列的输出数据协方差矩阵变为:
[0081][0082]
在空间谱测向搜救过程中,阵列的幅相误差是未知的,所以真正的阵列导向矢量
也是未知的,简单盲目利用天线阵列理想导向矢量a代替进行空间谱doa估计,就会导致测向误差。假设通道阵列仅存在幅度误差,通道数量为m,设幅度误差分别为阵列误差矩阵可以表示为阵列的输出数据协方差矩阵变为:
[0083][0084]
进行m个特征值分解,将解算得到的m个特征值按非递减顺序排列并且记为λ1,λ2,
…
,λm,对其进行归一化得到归一化特征值η1,η2,
…
,ηm。
[0085][0086]
当阵列误差矩阵g未知且通道幅度误差存在时,空间谱函数可以转化为:
[0087][0088]
当仅有通道幅度误差存在时,天线阵列的空间谱函数最大值点位置不变,只是幅度减小,所以幅度误差不会影响测向的角度,只会影响空间谱谱峰的高度。假设通道阵列仅存在相位误差,通道数量为m,设相位误差分别为[β1β2…
βm],误差矩阵可以表示为输出数据协方差矩阵为:
[0089][0090]
进行m个特征值分解,求得阵列的信号子空间和噪声子空间,最后当通道相位误差存在时,空间谱函数转化为:
[0091][0092]
当仅有通道相位误差存在时,天线阵列的空间谱函数最大值点位置受相位误差项的影响,当且仅当相位误差为0时,即sinθ1=sinθ时,空间谱函数达到最大值点。所以当通道相位误差存在时,对空间谱的峰值位置有影响,谱峰的幅度大小也会受到影响。
[0093]
单辅助信源校正算法采用方向信息精确已知的单个辅助信源对通道误差进行估计。假设阵列通道中幅相误差同时存在,辅助信源校正算法需要在空间中设置位置参数己知的校准信源,假设校准信源的方位角为θc,信源信号为s(t),信号功率为噪声功率为通道存在幅相误差g的情况下,接收的求救目标信号为:
[0094][0095]
接收信号的协方差矩阵为:
[0096][0097]
对信号的协方差矩阵进行特征值分解:
[0098][0099]
其中,为特征值对角矩阵,将按照非单调递增的顺序排列,其中为天线阵列的信号子空间,为天线阵列的噪声子空间,通道不存在幅相误差时,与a(θc)张成的列空间等价平行,当通道存在幅相误差g的情况下,与ga(θc)张成的列空间等价平行,所以:
[0100][0101][0102]
其中,k是未知复常数,公式(12)转换为:
[0103][0104]
根据公式(14)可知,通道幅相误差为:
[0105][0106]
在测向过程中,可以根据求得的幅相误差进行校正,进而提升多机协同搜救的测向精度
[0107]
图1为是本发明方法流程图,主要包括对通用飞机天线阵列结构进行分析,建立多机协同搜救的测向模型,之后对多机协同搜救系统两种测向方案中天线阵进行确定,最后对测向过程中的通道幅相误差特性进行分析,采用单辅助信源校正算法进行误差的校正,提高搜救过程中的测向精度。
[0108]
图2为多机协同搜救的测向模型示意图,(a)多机协同测向搜救示意图,(b)为通用飞机天线阵列结构,单个载机通过机载的天线阵列对求救目标进行独立的测向探测,获取目标的角度信息,当载机周围的电磁干扰较大或者自身天线阵列出现故障时,会造成测量误差较大、观测信息不全面。单机单独完成对求救目标的角度信息探测后,将信息传输到统一的信息处理中心,进行测向信息的融合处理。
[0109]
图3为多天线非等间距线阵测向结果图和双天线互质阵列测向结果图,仿真中假设入射信号源是高斯平稳随机过程,来波信号方向为20
°
。仿真中使用选定的5个阵元组成的全向非等间距线阵,阵元的位置为:dd=[0,3λ,0.625λ,0.875λ,4.258λ],采样快拍数设置为100,信噪比设置为5db,相应的多天线非等间距线阵测向结果如图(a)所示。相同条件下互质阵列的位置为:dd1=[0,7/8λ]和dd2=[0,3/4λ],采样快拍数设置为500,信噪比设置为-5db,相应双天线互质阵列测向结果如图(b)所示。从图3中可以看出,根据给定的非等间距阵列结构所采用的多天线和双天线两种测向方案在理想化仿真过程中均可以实现对求救目标的精确测向。
[0110]
图4是采用单辅助信源校正算法后的测向结果图,测向系统中的多个接收通道在采样捕获跟踪过程中的误差以及内部有源器件的使用都会影响接收通道的幅相特性。实验过程中发射信号频率设置为243mhz,信号来波方向0
°
,双天线基线长度设置为0.566米,接收机采集数据为short型,数据采集过程中系统主时钟设置为57.344mhz,i/q相关累加周期为4.8khz,采样有效数据为590个,将ccs数据进行数据转换,选取有效转换的数据进行多机
协同搜救测向结果计算。(a)为信号来波方向0
°
gui界面显示,(b)为信号来波方向10
°
gui界面显示。从图中可以看出,在实际的测向数据处理过程中,由于通道存在幅相误差,测向系统中双通道接收机输出端的相位差并不等于输入端的相位差,而是叠加了一定的相位偏移。另外,信号处理过程中,如混频精度和a/d采样的精度等,信号的捕获与跟踪等都会对信号处理的结果产生影响,造成最终的测向结果存在偏差。通过采用0
°
信源接收信号作为辅助信源进行通道误差的校正,在来波信号10
°
情况下,测向结果也有一定程度的偏差,但是经过单辅助信源的误差校正,可以实现误差的局部校正,将测向精度维持在5
°
的范围内,极大地提高了测向的精度,可以应用于多机协同搜救。
[0111]
本发明基于特定非等间距阵列结构的高精度空间谱测向方法,改善了单机测向系统的探测性能和空间分辨能力,降低了目标信息的模糊度,提升了系统探测的可信度,而且使目标测向精度、目标识别能力等方面均得到明显的改善。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。