1.本发明涉及升降平台技术领域,尤其涉及自主智能车升降平台。
背景技术:
2.自主智能车升降平台能够使智能车在不进行自主刹车的情况下,实现平台的升降作用,从而达到运送智能车翻越障碍的目的。
3.现有的技术是,智能车驶入升降平台,在不进行通讯和减速的情况下,通过安装感应装置,使得升降平台能够自主进行升降,这样的升降平台具有广泛的适用性和立即投入使用的快速性,但是,智能车驶入,不减速,车轮处于旋转的状态,车轮表面所带来的污垢会滑落至升降平台的表面,整体内有自清洁功能,进而影响使用。
4.因此,有必要提供一种新的自主智能车升降平台解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明是提供一种的自主智能车升降平台。
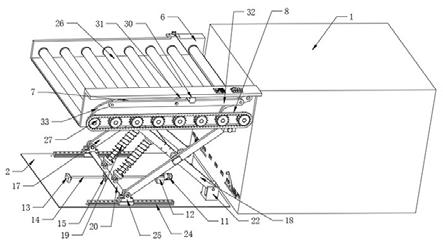
6.本发明提供的自主智能车升降平台包括:自主智能车升降平台,包括:置物台和支撑平台,所述置物台的表面配合安装有支撑平台,还包括:第一光电传感器、抬升装置、剪叉装置、顶架、制动装置、承载装置和清洁装置,所述支撑平台的上表面固定连接有抬升装置,所述支撑平台的上方设置有剪叉装置,所述剪叉装置与抬升装置通过轴承转动连接,所述剪叉装置与支撑平台固定连接,所述支撑平台的上方设置有顶架,所述顶架与剪叉装置固定连接,所述置物台的内部安装有清洁装置,所述清洁装置与顶架配合安装,所述顶架的内部转动安装有承载装置,所述顶架的表面转动安装有制动装置,所述制动装置与承载装置配合安装,所述顶架的表面安装有第一光电传感器。
7.优选的,所述抬升装置包括伺服电机、电机座、安装块、丝杆和活动块,所述支撑平台的表面固定连接有电机座,所述电机座的表面固定连接有伺服电机,所述伺服电机的输出端固定连接有丝杆,所述丝杆的表面通过螺纹连接有活动块,所述丝杆远离伺服电机的一端转动安装有安装块,所述安装块与支撑平台固定连接,。
8.优选的,所述剪叉装置包括连接轴、第一斜板、第二斜板、避震器、第一横板、第二横板、第一安装座、第二安装座、滑轨和滑块,所述顶架的底部和支撑平台的上表面均对称固定连接有滑轨,所述滑轨的表面滑动连接有滑块,其中两个所述滑块之间固定连接有第一横板,所述第一横板与活动块固定连接,所述第一横板的表面对称转动安装有避震器,四个所述滑块两两之间转动连接有第一斜板和第二斜板,所述第一斜板与第二斜板之间转动连接有连接轴,两个所述第二斜板之间固定连接有第二横板,两个所述避震器均与第二横板转动安装,所述支撑平台的表面和顶架的表面分别对称固定连接有第一安装座和第二安装座,所述第一斜板与第二安装座转动安装,所述第二斜板与第一安装座转动安装。
9.优选的,所述承载装置包括滚筒、链轮、链条和固定轴,所述顶架的内部等距转动安装有多个滚筒,所述滚筒的一端固定连接有固定轴,所述固定轴的表面固定连接有链轮,
且链轮有两个,多个所述链轮之间通过链条传动。
10.优选的,所述制动装置包括步进电机、转动杆、传动杆和制动杆,所述顶架的表面固定连接有步进电机,所述步进电机的输出端固定连接有传动杆,所述传动杆远离步进电机的一端转动连接有传动杆,所述传动杆的两端均转动安装有制动杆,两个所述制动杆均与顶架通过轴承转动连接,两个所述制动杆均与链轮配合安装。
11.优选的,所述清洁装置包括喷嘴、安装槽、压力传感器、弹簧、限位柱、连接块、斜柱、固定柱和光电传感器,所述置物台靠近支撑平台的侧面安装有多个喷嘴,所述置物台靠近支撑平台的侧面对称开设有安装槽,所述安装槽的侧壁固定连接有限位柱,所述安装槽的侧壁安装有压力传感器,所述压力传感器的表面固定连接有弹簧,所述弹簧套设在限位柱的表面,所述弹簧远离压力传感器的一端固定连接有连接块,所述连接块与安装槽滑动连接,所述连接块的表面转动安装有斜柱,所述斜柱远离连接块的一端固定连接有固定柱,所述安装槽的表面固定连接有光电传感器。
12.优选的,所述连接块的表面固定连接有第一横柱,所述第一横柱远离连接块的一端固定连接有电动伸缩杆,所述电动伸缩杆远离第一横柱的一端固定连接有第二横柱,两个所述第一横柱和第二横柱均置物台滑动连接。
13.优选的,所述固定柱的表面固定连接有橡胶垫。
14.与相关技术相比较,本发明提供的自主智能车升降平台具有如下有益效果:本发明提供在置物台的内部可安装有气泵,气泵的输出端与多个喷嘴固定连接,在顶架的表面可安装plc控制器,气泵、伺服电机、步进电机、压力传感器、第二光电传感器、电动伸缩杆和第一光电传感器均与plc控制器通过导线连接,电动伸缩杆的初始状态为伸长状态,经过一定时间,电动伸缩杆收缩,当顶架与橡胶垫紧密接触,直至连接块与限位柱紧密接触,弹簧被压缩,产生反作用力作用于压力传感器,压力传感器传输信号至plc控制器,此时,第二光电传感器不再被遮挡,传输信号至plc控制器,由plc控制器进行控制喷嘴进行喷气,喷嘴的高度与顶架表面平齐,对顶架的表面的污垢进行清洁处理,避免影响使用。
附图说明
15.图1为本发明提供的整体结构示意图之一;图2为本发明提供的整体结构示意图之二;图3为本发明提供的整体结构示意图之三;图4为本发明提供的清洁装置结构示意图。
16.图中标号:1、置物台;2、支撑平台;3、第一光电传感器;4、抬升装置;5、剪叉装置;6、顶架;7、制动装置;8、承载装置;9、橡胶垫;10、清洁装置;11、伺服电机;12、电机座;13、安装块;14、丝杆;15、活动块;16、连接轴;17、第一斜板;18、第二斜板;19、避震器;20、第一横板;21、第二横板;22、第一安装座;23、第二安装座;24、滑轨;25、滑块;26、滚筒;27、链轮;28、链条;29、固定轴;30、步进电机;31、转动杆;32、传动杆;33、制动杆;34、喷嘴;35、安装槽;36、压力传感器;37、弹簧;38、限位柱;39、连接块;40、斜柱;41、固定柱;42、第二光电传感器;43、第一横柱;44、电动伸缩杆;45、第二横柱。
具体实施方式
17.下面结合附图和实施方式对本发明作进一步说明。
18.请结合参阅图1、图2、图3和图4,其中,图1为本发明提供的整体结构示意图之一;图2为本发明提供的整体结构示意图之二;图3为本发明提供的整体结构示意图之三;图4为本发明提供的清洁装置结构示意图。自主智能车升降平台包括:第一光电传感器3、抬升装置4、剪叉装置5、顶架6、制动装置7、承载装置8和清洁装置10。
19.在具体实施过程中,如图1、图2和图3所示,自主智能车升降平台,包括:置物台1和支撑平台2,所述置物台1的表面配合安装有支撑平台2,还包括:第一光电传感器3、抬升装置4、剪叉装置5、顶架6、制动装置7、承载装置8和清洁装置10,所述支撑平台2的上表面固定连接有抬升装置4,所述支撑平台2的上方设置有剪叉装置5,便于智能车的抬升;所述剪叉装置5与抬升装置4通过轴承转动连接,所述剪叉装置5与支撑平台2固定连接,所述支撑平台2的上方设置有顶架6,所述顶架6与剪叉装置5固定连接,所述置物台1的内部安装有清洁装置10,能够定时对顶架6表面进行清洁,防止污垢滞留于其表面,避免影响使用;所述清洁装置10与顶架6配合安装,所述顶架6的内部转动安装有承载装置8,用于承载智能车;所述顶架6的表面转动安装有制动装置7,起到制动作用,使得智能车能够不减速而置于滚筒26的表面,所述制动装置7与承载装置8配合安装,所述顶架6的表面安装有第一光电传感器3。
20.如图1和图2所示,所述抬升装置4包括伺服电机11、电机座12、安装块13、丝杆14和活动块15,所述支撑平台2的表面固定连接有电机座12,所述电机座12的表面固定连接有伺服电机11,所述伺服电机11的输出端固定连接有丝杆14,所述丝杆14的表面通过螺纹连接有活动块15,所述丝杆14远离伺服电机11的一端转动安装有安装块13,所述安装块13与支撑平台2固定连接,为顶架6抬升提供动力,伺服电机11启动,带动丝杆14转动,进而带动活动块15移动,进而带动第一横板20移动。
21.如图1和图2所示,所述剪叉装置5包括连接轴16、第一斜板17、第二斜板18、避震器19、第一横板20、第二横板21、第一安装座22、第二安装座23、滑轨24和滑块25,所述顶架6的底部和支撑平台2的上表面均对称固定连接有滑轨24,所述滑轨24的表面滑动连接有滑块25,其中两个所述滑块25之间固定连接有第一横板20,所述第一横板20与活动块15固定连接,所述第一横板20的表面对称转动安装有避震器19,四个所述滑块25两两之间转动连接有第一斜板17和第二斜板18,所述第一斜板17与第二斜板18之间转动连接有连接轴16,两个所述第二斜板18之间固定连接有第二横板21,两个所述避震器19均与第二横板21转动安装,所述支撑平台2的表面和顶架6的表面分别对称固定连接有第一安装座22和第二安装座23,所述第一斜板17与第二安装座23转动安装,所述第二斜板18与第一安装座22转动安装,第一斜板17和第二斜板随着活动块15的移动而改变角度,对顶架6进行抬升或者下降。
22.如图1和图2所示,所述承载装置8包括滚筒26、链轮27、链条28和固定轴29,所述顶架6的内部等距转动安装有多个滚筒26,所述滚筒26的一端固定连接有固定轴29,所述固定轴29的表面固定连接有链轮27,且链轮27有两个,多个所述链轮27之间通过链条28传动,起到传动作用,能够通过控制链轮27的转动,使得滚筒26转动或者被制动。
23.如图1和图3所示,所述制动装置7包括步进电机30、转动杆31、传动杆32和制动杆33,所述顶架6的表面固定连接有步进电机30,所述步进电机30的输出端固定连接有传动杆32,所述传动杆32远离步进电机30的一端转动连接有传动杆32,所述传动杆32的两端均转
动安装有制动杆33,两个所述制动杆33均与顶架6通过轴承转动连接,两个所述制动杆33均与链轮27配合安装,通过与第一光电传感器3的感应,传输信号至plc控制器,进而步进电机30启动,带动转动杆31转动,进而带动制动杆33与链轮27配合或者分离,进而使得滚筒26能够转动或者被制动。
24.如图3和图4所示,所述清洁装置10包括喷嘴34、安装槽35、压力传感器36、弹簧37、限位柱38、连接块39、斜柱40、固定柱41和第二光电传感器42,所述置物台1靠近支撑平台2的侧面安装有多个喷嘴34,所述置物台1靠近支撑平台2的侧面对称开设有安装槽35,所述安装槽35的侧壁固定连接有限位柱38,所述安装槽35的侧壁安装有压力传感器36,所述压力传感器36的表面固定连接有弹簧37,所述弹簧37套设在限位柱38的表面,所述弹簧37远离压力传感器36的一端固定连接有连接块39,所述连接块39与安装槽35滑动连接,所述连接块39的表面转动安装有斜柱40,所述斜柱40远离连接块39的一端固定连接有固定柱41,所述安装槽35的表面固定连接有第二光电传感器42,电动伸缩杆44的初始状态为伸长状态,经过一定时间,电动伸缩杆44收缩,当顶架6与橡胶垫9紧密接触,直至连接块39与限位柱38紧密接触,弹簧37被压缩,产生反作用力作用于压力传感器36,压力传感器36传输信号至plc控制器,此时,第二光电传感器42不再被遮挡,传输信号至plc控制器,由plc控制器进行控制喷嘴34进行喷气,喷嘴34的高度与顶架6表面平齐,对顶架6的表面的污垢进行清洁处理,避免影响使用。
25.如图4所示,所述连接块39的表面固定连接有第一横柱43,所述第一横柱43远离连接块39的一端固定连接有电动伸缩杆44,所述电动伸缩杆44远离第一横柱43的一端固定连接有第二横柱45,两个所述第一横柱43和第二横柱45均置物台1滑动连接,电动伸缩杆44伸长时,当连接块39与限位柱38接触时,第二光电传感器42依然被遮挡,电动伸缩杆44缩短时,连接块39与限位柱38接触时,第二光电传感器42不再被遮挡,则传输信号至plc控制器。
26.如图4所示,所述固定柱41的表面固定连接有橡胶垫9,避免顶架6与固定柱41接触产生磨损。
27.工作原理:在初始状态时,两个制动杆33均与链轮27紧密配合,此时滚筒26处于被限制的状态,不能够转动,便于智能车开上顶架6表面,当智能车将第一光电传感器3遮挡时,传输线号至plc控制器,由plc控制器控制步进电机30启动,带动转动杆31转动,进而带动传动杆32移动一定距离,进而带动两个制动杆33与链轮27分离,滚筒26能够转动,使得智能车不必减速,滚筒26随着车轮转动而转动,同时,伺服电机11启动,带动丝杆14转动,进而带动活动块15移动,进而带动第一横板20移动,滑块25在滑轨24表面滑动,由安装块13对活动块15进行限位,保证活动块15不会与丝杆14分离,滑轨24不会与滑块25进行分离,进而带动两个第一斜板17和第二斜板18转动一定角度,进而带动顶架6抬升,智能车抬升,抬升过后,步进电机30带动转动杆31转动,进而重新带动制动杆33与链轮27进行配合,滚筒26重新被制动,智能车从滚筒26表面分离,智能车能够不减速实现抬升,进一步的,顶架6下降的过程中,两个橡胶垫9与顶架6紧密接触,斜柱40随着固定柱41的移动而移动,带动活动块15向着限位柱38靠近,电动伸缩杆44的初始状态为伸长状态,经过一定时间,电动伸缩杆44收缩,当顶架6与橡胶垫9紧密接触,直至连接块39与限位柱38紧密接触,弹簧37被压缩,产生反作用力作用于压力传感器36,压力传感器36感应压力超过预设值,压力传感器36传输信号至plc控制器,此时,第二光电传感器42不再被遮挡,传输信号至plc控制器,由plc控制器
进行控制喷嘴34进行喷气,喷嘴34的高度与顶架6表面平齐,对顶架6的表面的污垢进行清洁处理,避免影响使用。
28.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。