1.本发明涉及软土地基沉降技术领域,尤其是一种利用北斗定位的超声波沉降和水平位移测量装置及测量方法。
背景技术:
2.地基在建筑物的荷载作用下,随着的超孔隙水压力的消散、有效应力的增长都会产生沉降。如果发生地基沉降,特别是发生不均匀沉降,一旦超过地基上建筑物所允许的范围,轻则影响建筑物的正常使用,严重时甚至会导致建筑开裂倾斜、路基沉陷、堤坝坍塌等情况,地基的沉降对于建筑物的安全有着重大的影响,因此地基沉降问题是工程人员十分关心的,在实际工程中需要进行实地现场量测,以明确工程中的实际沉降量。
3.一般而言,目前沉降观测按照观测部位可分为表层沉降观测、深层分层沉降观测和断面沉降观测。现今工程中(如隧道工程)普遍采用的是表层沉降观测,即通过在现场埋设沉降板,上接沉降标,用水准仪测量其高度的变化,进而推算出该区域地基的沉降,但该方法并非一种方便的测量方法,一是可能在操作的过程中对施工产生严重的干扰,在工地这种复杂的环境中也不能够保证监测人员的安全:二则是测量比较单一,仅仅能监测到土体的竖向变形情况,而对于一些比较复杂的工程不仅仅需要监测土体的竖向变形,还要监测土体的水平位移,以便为施工的安全性提供更好的参考。目前比较常用的观测土体水平位移的方法就是利用全站仪以及扫描仪。但是普遍价格比较昂贵,于是经济性就成为了面对的主要问题。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种利用北斗定位的超声波沉降和水平位移测量装置及测量方法,结构简单、测量精度高、操作简便、经济性较强,可适用于不同环境。
5.为解决上述技术问题,本发明提供一种利用北斗定位的超声波沉降和水平位移测量装置,包括:北斗定位装置、超声波发射装置、超声波接收装置、竖杆和混凝土基台;北斗定位装置固定在竖杆上,在竖杆顶部安装超声波发射装置和超声波接收装置,混凝土基台预留孔洞,将顶部安装好超声波发射装置和超声波接收装置的竖杆插入预留孔洞。
6.相应的,一种利用北斗定位的超声波沉降和水平位移测量方法,包括如下步骤:
7.(1)准备阶段:选取两个基准点浇筑混凝土基台,然后依次在各个观测点分别浇筑混凝土基台,安装好测量装置;
8.(2)观测阶段:将安装完成的测量装置插入混凝土基台上方预留的孔洞,开启仪器,通过北斗定位装置获取a、b、c、d各点坐标,通过超声波分别测量出ac,ad,bc,bd以及cd之间的距离;
9.(3)数据处理阶段:根据a、b、c、d各点坐标计算ac、ad、bc、bd以及cd之间的广域距
离,以超声波所测距离为横坐标,以广域距离为纵坐标建立相关性关系,剔除异常数据,建立回归函数;根据回归函数,修正a、b、c、d各点坐标,比较各点上次测量结果,获取其沉降和水平位移。
10.优选的,步骤(2)中,a、b、c、d四点坐标不能在同一平面,任意三点坐标不能在同一直线。
11.优选的,步骤(3)中,根据回归函数,修正a、b、c、d各点坐标,比较各点上次测量结果,获取其沉降和水平位移具体包括如下步骤:
12.(a)已知a(b)、c两点为基准点,在三角形abd中已知各边长ab、ad、bd根据余弦定理既可求得∠bad;由∠bad和边长ad既可求得ae及ad在水平面的投影a1d1,d点z坐标值zd=za-ae;
13.(b)在三角形cdf中已知边长cd、df=z
d-zc,由余弦定理既可求得∠cdf;由∠cdf和边长cd既可求得cf即为cd在水平面上的投影c1d1;
14.(c)由a、c、d三点在水平面上的投影点a1、c1、d1组成三角形a1c1d1,已知边长a1c1、a1d1、c1d1根据余弦定理确定各内角值,由a1点坐标、边长a1d1、∠c1a1d1既可求得d1点横坐标xd和纵坐标yd;
15.(d)上述步骤(a)、(c)既可确定待测点d坐标;
16.(e)在缺乏超声波所测各点间距离时,根据已建立的回归函数对广域距离进行修正,再根据步骤(a)、(b)、(c)确定待测点坐标。
17.本发明的有益效果为:本发明克服了北斗定位精度差的缺陷,综合北斗广域定位和超声局部高精度两者优势,具有较高的经济性的同时又能同时观测土体的水平及竖向位移,测量精度较高、操作简便、可适用于不同土体变形下的沉降测量,并且本发明不会影响工程的正常施工使用,保证了检测人员的人身安全,又降低了使用成本。
附图说明
18.图1为本发明的方法流程示意图。
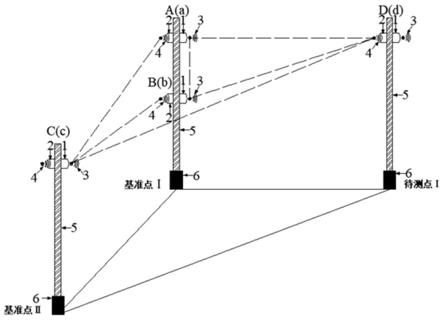
19.图2为本发明数据处理过程示意图。
20.其中,1、超声波发射装置;2、超声波接收装置;3、发射的超声波;4、接收的超声波;5、竖杆和北斗定位装置;6、混凝土基台。
具体实施方式
21.一种利用北斗定位的超声波沉降和水平位移测量装置,包括:北斗定位装置、超声波发射装置、超声波接收装置、竖杆和混凝土基台;北斗定位装置固定在竖杆上,在竖杆顶部安装超声波发射装置和超声波接收装置,混凝土基台预留孔洞,将顶部安装好超声波发射装置和超声波接收装置的竖杆插入预留孔洞。
22.如图1所示,一种利用北斗定位的超声波沉降和水平位移测量方法,包括如下步骤:
23.(1)准备阶段:选取两个基准点浇筑混凝土基台,然后依次在各个观测点分别浇筑混凝土基台,安装好测量装置;
24.(2)观测阶段:将安装完成的测量装置插入混凝土基台上方预留的孔洞,开启仪
器,通过北斗定位装置获取a、b、c、d各点坐标,上述选取的四点坐标不能在同一平面,任意三点坐标不能在同一直线,通过超声波分别测量出ac,ad,bc,bd以及cd之间的距离;
25.(3)数据处理阶段:
26.1)根据北斗定位装置获取的a、b、c、d各点坐标应用两点间的距离公式计算出ac、ad、bc、bd以及cd之间的广域距离;
27.2)以超声波所测距离为横坐标,以广域距离为纵坐标建立相关关系,剔除异常数据,建立回归函数;
28.3)如图2所示,已知a(b)、c两点为基准点,在三角形abd中已知各边长ab、ad、bd根据余弦定理既可求得∠bad;由∠bad和边长ad既可求得ae及ad在水平面的投影a1d1,d点z坐标值zd=za-ae;
29.4)在三角形cdf中已知边长cd、df=z
d-zc,由余弦定理既可求得∠cdf;由∠cdf和边长cd既可求得cf即为cd在水平面上的投影c1d1;
30.5)由a、c、d三点在水平面上的投影点a1、c1、d1组成三角形a1c1d1,已知边长a1c1、a1d1、c1d1根据余弦定理确定各内角值,由a1点坐标、边长a1d1、∠c1a1d1既可求得d1点横坐标xd和纵坐标yd;
31.6)上述步骤3)、5)确定既可确定待测点d坐标;
32.7)在缺乏超声波所测各点间距离时,可根据步骤(2)中已建立的回归函数对广域距离进行修正,再根据步骤3)、4)、5)确定待测点坐标。
33.本发明克服了北斗定位精度差的缺陷,综合北斗广域定位和超声局部高精度两者优势,具有较高的经济性的同时又能同时观测土体的水平及竖向位移,测量精度较高、操作简便、可适用于不同土体变形下的沉降测量,并且本发明不会影响工程的正常施工使用,保证了检测人员的人身安全,又降低了使用成本。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。