1.本发明属于实验测量仪器领域,尤其涉及一种重力加速度测量方法及重力加速度测量装置。
背景技术:
2.在整个物理学史上对重力加速度的测量有着近乎完备的实验方案。现有的测量重力加速度的方法主要有单摆测重力加速度、凯特摆测重力加速度、圆锥摆法、斜槽测量、打点计时器测量、u型管高度差测量(匀加速运动)、旋转液面法、用弹簧秤和已知质量的钩码测量等。
3.其中包弈靓等人的“新型旋转液体实验——介绍一个研究性物理实验”10.16854/j.cnki.1000-0712.2003.02.009,28页中公开了一种通过在圆柱形容器中装入一定量的高粘性的液体,通过圆柱形的容器旋转带动其中的液体旋转,其中的液体会因为离心力的作用从而变成一个旋转抛物面,通过仪器来收集此旋转抛物面的数据并通过旋转抛物面的相关特性可以测量出重力加速度的值。但是,这种方案对圆柱形容器的体积要求较大,对圆柱形容器旋转的速度要求较高,否则,难以形成明显的稳定的可供进行数据收集的旋转抛物面。另一方面,此技术对圆柱形容器的旋转稳定性要求非常高,否则液体旋转形成的形状不是标准的旋转抛物面,最后测量出的重力加速度的值误差非常大。
技术实现要素:
4.为了解决上述技术问题,本发明的目的之一在于提供一种操作简便,同时测量精准度高的重力加速度测量方法。
5.为了实现上述目的,本发明的技术方案如下:一种重力加速度测量方法,将竖直的u形管内装入密度为ρ的液体,再以u形管的一端为竖向的轴线并水平转动,其转动角速度为ω,其中,所述u形管的两个立管之间的间距为l,且转动后,所述u形管的两个立管之间的液位差为的
△
h;此时g=ω2l2/2
△
h,其中g为重力加速度。
6.上述技术方案的有益效果在于:如此使得u形管在转动时产生的离心力使得u形管的两端产生液位差,并据此根据旋转平台转动的角速度、u形管两侧立管沿转动轨迹径向的间距差和u形管两端的液位差计算出此地的重力加速度值。
7.本发明的目的之二在于提供一种可便捷,且精确并采用上述重力加速度测量方法的重力加速度测量装置。
8.为了实现上述目的,本发明的另一技术方案如下:一种重力加速度测量装置,包括u形管、液位感应装置、旋转平台和控制器,所述旋转平台的驱动端朝上,且所述u形管的竖直安装在所述旋转平台的驱动端,且所述u形管的端的立管与所述旋转平台的轴线同轴分布,所述u形管内用以装纳液体,所述液位感应装置设置在所述旋转平台的上方,其用以感应所述u形管两端之间的液位差,所述液位感应装置和旋转平台均与所述控制器电连接,所述控制器用以控制所述旋转平台转动的转速。
9.上述技术方案的有益效果在于:其结构简单,且可便捷得出u形管转动时的液位差和转速,同时根据u形管两个立管之间的间距来计算出此地的重力加速度。
10.上述技术方案中所述u形管为透明管,且所述u形管的两侧的立管上均具有原始标定线,且所述u形管两侧立管上的原始标定线的水平高度一致,所述液位感应装置用以感应所述u形管任意一侧的立管的液位高度。
11.上述技术方案的有益效果在于:其结构简单,如此可由液位感应装置测量u形管远离所述旋转平台轴线一侧的立管的液位高端至初始刻度的间距的2倍即为u形管实时的液位差。
12.上述技术方案中所述液位感应装置包括安装座、激光发射头和激光接收头,所述安装座的上端具有一个n形架,所述旋转平台带动所述u形管与所述旋转平台轴线同轴分布的立管位于所述n形架内,所述激光发射头和激光接收头分别安装在所述n形架两侧的下端,且二者水平间隔分布,且所述u形管1内的液体为不透光的深色液体,所述激光发射头和激光接收头均与所述控制器电连接。
13.上述技术方案的有益效果在于:如此可在启动旋转平台后,逐渐提高旋转平台的转速直至u形管远离旋转平台轴线一侧的立管内的液位高度达到激光发射头和激光接收头的水平高度即可记录此时旋转平台的转速并保持在该记录转速转动,而此时液位差的高度即为激光发射头至原始标定线之间竖直间距的2倍,而u形管的两个立管之间的间距恒定,此时可便捷的计算出此处的重力加速度。
14.上述技术方案中所述u形管与所述旋转平台轴线同轴分布的立管上还设有标定线,且所述标定线与所述激光发射头和激光接收头处于同一水平面上。
15.上述技术方案的有益效果在于:如此可在旋转平台保持在记录转速转动时,观察u形管远离所述旋转平台轴线的一侧的立管内的液位高度是否与初始刻度重合,若重合则此次测试数据准确有效,若不重合,则此次测试数据可以作废。
16.上述技术方案中所述旋转平台包括壳体、转动座和电机,所述电机安装在所述壳体内,所述转动座水平设置在所述壳体的上方,所述转动座的下端中部固定设有一根穿入至所述壳体内,并与所述壳体转动连接的转轴,所述转轴位于所述壳体内的一端与所述电机的驱动轴传动连接,所述转动座构成所述旋转平台的驱动端,所述电机与所述控制器电连接。
17.上述技术方案的有益效果在于:其结构简单,且转速监测方便。
18.上述技术方案中所述电机为变频电机。
19.上述技术方案的有益效果在于:其转速控制方便。
附图说明
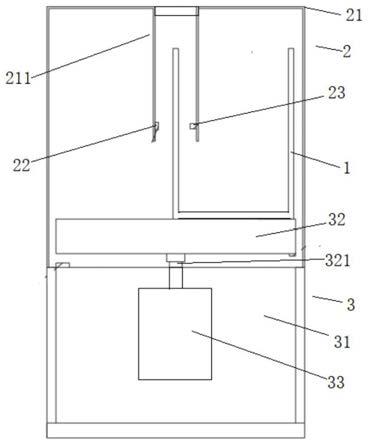
20.图1为本发明实施例2所述重力加速度测量装置的结构简图;
21.图2为本发明实施例2所述u形管与液位感应装置的结构示意图;
22.图3为本发明实施例2电机与转动座的示意图;
23.图4为本发明实施例2中控制器的电连接图;
24.图5为本发明实施例2中u形管、激光发射头和激光接收头的示意图。
25.图中:1 u形管、11原始标定线、12标定线、2液位感应装置、21安装座、211 n形架、
22激光发射头、23激光接收头、3旋转平台、31壳体、32转动座、321转轴、33电机、4控制器。
具体实施方式
26.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
27.实施例1
28.本实施例提供了一种重力加速度测量方法,将竖直的u形管1内装入密度为ρ的液体,再以u形管1的一端为竖向的轴线并水平转动,其转动角速度为ω,其中,所述u形管1的两个立管之间的间距为l,且转动后,所述u形管1的两个立管之间的液位差为的
△
h;此时g=ω2l2/2
△
h,其中g为重力加速度,如此使得u形管在转动时产生的离心力使得u形管的两端产生液位差,并据此根据旋转平台转动的角速度、u形管两侧立管沿转动轨迹径向的间距差和u形管两端的液位差计算出此地的重力加速度值。
29.其推导原理如下:
30.在圆形旋转平台的匀速转动下,u型管内每一个液元的旋转角速度均为ω,因此u型管内水平段的液体所受向心力f向,由密度质量公式:m=ρsl,根据微积分公式推导为:
[0031][0032]
其中,α为向心力加速度,u型管两臂间距或u型管水平部分长度为l;u型管的横截面积为s;u型管内液体的密度为ρ;u型管内每一个液元对应的横坐标为x;
[0033]
经受力分析,u型管内水平段的向心力f由u型管左右两臂内液柱的压力差提供,则f
压
=f
向
,由液体压强公式:p=ρgh和压力公式:f=ps得压力差为:
[0034]f压
=ρgsδh
ꢀꢀꢀꢀꢀ
公式二
[0035]
联立公式一和公式二得:
[0036]
化简解得:
[0037]
实施例2
[0038]
如图1-图5所示,本实施例提供了一种重力加速度测量装置,包括u形管1、液位感应装置2、旋转平台3和控制器4,所述旋转平台3的驱动端朝上,且所述u形管1的竖直安装在所述旋转平台3的驱动端,且所述u形管1的端的立管与所述旋转平台3的轴线同轴分布,所述u形管1内用以装纳液体,所述液位感应装置2设置在所述旋转平台3的上方,其用以感应所述u形管1两端之间的液位差,所述液位感应装置2和旋转平台3均与所述控制器4电连接,所述控制器4用以控制所述旋转平台3转动的转速,其结构简单,且可便捷得出u形管转动时的液位差和转速,同时根据u形管两个立管之间的间距来计算出此地的重力加速度。
[0039]
上述技术方案中所述u形管1为透明管,且所述u形管1的两侧的立管上均具有原始标定线11,且所述u形管1两侧立管上的原始标定线11的水平高度一致,所述液位感应装置2用以感应所述u形管1任意一侧的立管的液位高度其结构简单,如此可由液位感应装置测量u形管远离所述旋转平台轴线一侧的立管的液位高端至初始刻度的间距的2倍即为u形管实时的液位差。
[0040]
上述技术方案中所述液位感应装置2包括安装座21、激光发射头22和激光接收头23,所述安装座21的上端具有一个n形架211,所述旋转平台3带动所述u形管1与所述旋转平台3轴线同轴分布的立管位于所述n形架211内,所述激光发射头22和激光接收头23分别安装在所述n形架211两侧的下端,且二者水平间隔分布,且所述u形管1内的液体为不透光的深色液体,所述激光发射头22和激光接收头23均与所述控制器4电连接,如此可在启动旋转平台后,逐渐提高旋转平台的转速直至u形管远离旋转平台轴线一侧的立管内的液位高度达到激光发射头和激光接收头的水平高度即可记录此时旋转平台的转速并保持在该记录转速转动,而此时液位差的高度即为激光发射头至原始标定线之间竖直间距的2倍(定义激光发射头至原始标定线之间的竖直间距为s,则
△
h=2s),而u形管的两个立管之间的间距恒定,此时可便捷的计算出此处的重力加速度。
[0041]
上述技术方案中所述u形管1与所述旋转平台3轴线同轴分布的立管上还设有标定线12,且所述标定线12与所述激光发射头22和激光接收头23处于同一水平面上(即激光发射头水平朝向激光接收头发射激光束,且u形管靠近所述旋转平台轴线一侧的立管阻隔在二者之间,其中,液位可采用低粘度的深色液体),如此可在旋转平台保持在记录转速转动时,观察u形管远离所述旋转平台轴线的一侧的立管内的液位高度是否与初始刻度重合,若重合则此次测试数据准确有效,若不重合,则此次测试数据可以作废(当然也可以标定线作为起始刻度在其上下两侧分别设置刻度线,如此可读取该侧立管内的实际液位与标定线12之间的间距s,此时需对液位差进行校准,
△
h=2s
±
s,若实际液位低于标定线,则
△
h=2s s,若实际液位高于标定线,则
△
h=2s-s)。
[0042]
上述技术方案中所述旋转平台3包括壳体31、转动座32和电机33,所述电机33安装在所述壳体31内,所述转动座32水平设置在所述壳体31的上方,所述转动座32的下端中部固定设有一根穿入至所述壳体31内,并与所述壳体31转动连接的转轴321,所述转轴321位于所述壳体31内的一端与所述电机33的驱动轴传动连接,所述转动座32构成所述旋转平台3的驱动端,所述电机33与所述控制器4电连接,且所述安装座与所述壳体连接,需要注意的是安装座不能影响u形管旋转。
[0043]
上述技术方案中所述电机33为变频电机(其转速不宜高于200r/mi n),其转速控制方便,其中电机的转速可直接通过带有霍尔传感器的变频器获得,并输送至控制器(所述控制器可为带有人机交互界面的arm系列单片机),此时可直接通过控制器根据实施例1中的公式计算出重力加速度。
[0044]
本实施例的原理是:在试验准备时,先需将整个重力加速度测量装置进行调平处理(调至水平,而重力加速度测量装置的下端可设置调平脚),再将u形管内加入液体,液体的上端与所述原始标定线齐平,然后启动旋转平台转动,并逐渐提高其转速,直至u形管与旋转平台轴线侧的立管内的液位降至标定线时(此时激光接收头恰好能接收到激光发射头所发出的激光信号),同时由控制旋转平台保持在该转速转动(即不再提速),并由控制器显示并记录下该转速(即得到液位差为
△
h=2s时u形管转动时的角速度),此时可通过实施例1中所提供的公式计算出重力加速度。
[0045]
以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
