具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统
技术领域
1.本发明涉及耳鼻喉技术领域,具体为具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统。
背景技术:
2.耳鼻咽喉原名“五官科”,后经历卫生部改革之后正式命名为“耳鼻咽喉科”耳鼻咽喉科疾病的分类主要从耳朵、鼻子、咽喉这几个部位常发生的一些疾病来分,而在其耳鼻咽喉病变时需要医生对其进行手术,而医生在手术操刀前会通过耳鼻喉3d可视化模拟手术培训系统训练,提升自己的手术经验,进一步提升其手术的成功率。
3.市场上的电缆的耳鼻喉3d可视化模拟手术培训系统存在不便于针对不同的培训人员进行调整的缺点。
技术实现要素:
4.本发明的目的在于提供具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,包括安装座和vr眼镜,所述安装座一侧安装有滑轨,且所述滑轨内部安装有调节组件,所述调节组件底部连接有仿真主控台,且所述仿真主控台一侧连接有电动伸缩杆,所述电动伸缩杆底部连接有辅助组件,所述安装座上方安置有传感器模组,且所述安装座顶部安装有显示屏,所述vr眼镜设置于所述安装座一侧,所述辅助组件包括安置座、滑槽、行程气杆、扶手座、贴合气囊、软胶垫和加热垫,所述安置座表面开设有所述滑槽,且所述滑槽内部设置有行程气杆,所述行程气杆输出端连接有所述扶手座,且所述扶手座内部设置有所述贴合气囊,所述贴合气囊表面粘接有所述软胶垫,且所述软胶垫中部安置有所述加热垫。
6.优选的,所述调节组件包括支撑架和伸缩气杆,且所述支撑架内部设置有所述伸缩气杆,所述支撑架关于所述安装座的中心位置对称设有两组。
7.优选的,所述仿真主控台底部连接有六轴自由操作杆,且所述六轴自由操作杆内部连接有所述夹持组件,所述夹持组件包括夹持座、自由轴、气动伸缩杆、夹持块、稳固片、橡胶座和动作捕捉传感器,且所述夹持座外部连接有所述自由轴,所述夹持座内部设置有所述气动伸缩杆,且所述气动伸缩杆输出端连接有所述夹持块,所述夹持块内壁粘接有所述稳固片,所述夹持座底部设置有所述橡胶座,且所述橡胶座内部嵌入有所述动作捕捉传感器。
8.优选的,所述夹持块通过所述气动伸缩杆与所述夹持座构成伸缩结构,且所述夹持块关于所述夹持座的内部呈圆周转分布,且所述橡胶座内壁呈弧状结构。
9.优选的,所述动作捕捉传感器通过所述橡胶座与所述夹持座构成固定连接,且所述橡胶座一端呈长条状结构,而且所述橡胶座内壁呈c字状结构。
10.优选的,所述安装座一侧安置有安置组件,且所述安置组件包括阻尼转轴、连接门、放置架、复位弹簧、夹座、防护垫、直角架和气动喷嘴,所述阻尼转轴外部设置有所述连接门,且所述连接门内壁设置有所述放置架,所述放置架一侧连接有所述复位弹簧,且所述复位弹簧另一端连接有所述夹座,所述夹座内壁设置有所述防护垫,所述放置架两侧均连接有所述直角架,且所述直角架内部安装有所述气动喷嘴。
11.优选的,所述夹座通过所述复位弹簧与所述放置架构成弹性连接,且所述夹座与所述夹座滑动连接,而且所述夹座呈匚状结构,并且夹座与所述vr眼镜相互贴合。
12.优选的,所述扶手座与所述贴合气囊嵌入式连接,且所述扶手座表面呈内凹状结构。
13.优选的,所述安装座一侧设置有主机,且所述主机内部设置有主控板,所述主控板与4g模块相连接,且所述4g模块与远程服务器相连接,所述远程服务器与授权app相连接,所述主控板与驱动模块相连接,且所述驱动模块与记录模块相连接,所述记录模块与分析模块相连接,且所述分析模块与考核模块相连接。
14.优选的,所述记录模块能够将培训人员的模拟视频与手术动作统统记录,并将其复制进资料库,用于培训者后期观察,以便找出术中不足之处加以改进。
15.本发明提供了具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,具备以下有益效果:该具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,通过采用多个组件之间的相互配合设置,不仅能够自动根据培训者的身高调节培训作业是设备的高度,方便其使用,同时扶手座同样可用于调节,方便不同习惯的医护人员使用,同时在作业时不仅能够将培训中vr眼镜所显示的内容记录同时还通过动作捕捉传感器对培训时的动作记录,方便后期对照找到其不足,且通过安置组件能够对vr眼镜进行收纳清洁提升其实用性,并且通过4g模块能够将记录的视频内容与培训考核结果发送至培训者的远程设备中,方便其使用;
16.1、本发明通过传感器模组、伸缩气杆与仿真主控台之间的相互配合设置,该传感器模组包括红外距离传感器、温度传感器、超声波传感器和记录摄像头,通过红外距离传感器可检测培训人员的合适作业距离,配合温度传感器与记录摄像头可检测是否为培训人员还是路过的行人,并通过超声波传感器将所测信心上传至主机并由此控制伸缩气杆带动仿真主控台沿滑轨滑动,使得该装置能够自动根据培训者的身高调节培训作业是设备的高度,方便其使用。
17.2、本发明通过仿真主控台、电动伸缩杆与辅助组件之间的相互配合设置,在电动伸缩杆的带动下能够驱动安置座与仿真主控台之间的间距,配合其表面开设的滑槽,使得在行程气杆的带动下能够控制扶手座的位置,从而方便不同习惯的人员使用,该扶手座表面设置有贴合气囊,使得手部放置其内部时能够被包裹,配合软胶垫在和加热垫使其长时间手术中能够减小培训者的不适感,提升其舒适度。
18.3、本发明通过仿真主控台、六轴自由操作杆与夹持组件之间的相互配合设置,可将模拟器械放置于夹持座内部,并通过气动伸缩杆的推动使得夹持块能够靠近并贴合在模拟器械外部,配合稳固片能够提升其模拟器械之间连接的牢固性,此过程能够方便夹持不同尺寸的培训器械,提升了该装置的通用性,同时通过动作捕捉传感器通过橡胶座扣合在模拟器械外部,使得在培训过程中能够实时记录培训人员的动作,方便后期寻找自己术中
的不足。
19.4、本发明通过安置组件与vr眼镜之间的相互配合设置,在拉动连接门时使其能够沿阻尼转轴转动打开,并通过放置架在使用结束后能够将vr眼镜放置在其内部隐藏于安装座内部,进一步提升对vr眼镜的防护性,进一步通过直角架与气动喷嘴能够对眼镜外部进行吹气清洁,减小其外部杂质与镜片表面灰尘的干扰,该放置架通过可活动的夹座能够牢固卡住vr眼镜避免其无故脱落损坏的情况。
20.5、本发明通过主控板、记录模块与分析模块之间的相互配合设置,将培训中vr眼镜所显示的内容记录同时还通过动作捕捉传感器对培训时的动作记录并上传至分析模块中,通过分析模块的分析检查可将术中的错误标出,并通过考核模块将此次培训结果发送至培训者的远程设备中,一同发送的还有记录的视频内容中的错误点与建议改进点,方便培训者快速找到自身的不足并加以改进。
附图说明
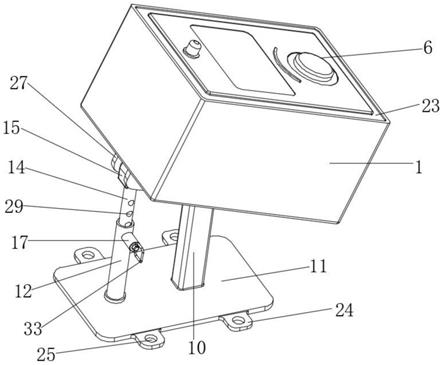
21.图1为本发明具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统的整体结构示意图;
22.图2为本发明具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统的辅助组件结构示意图;
23.图3为本发明具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统的夹持组件俯视结构示意图;
24.图4为本发明具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统的安置组件结构示意图;
25.图5为本发明具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统的系统流程结构示意图。
26.图中:1、安装座;2、滑轨;3、调节组件;301、支撑架;302、伸缩气杆;4、仿真主控台;5、电动伸缩杆;6、辅助组件;601、安置座;602、滑槽;603、行程气杆;604、扶手座;605、贴合气囊;606、软胶垫;607、加热垫;7、传感器模组;8、显示屏;9、vr眼镜;10、六轴自由操作杆;11、夹持组件;1101、夹持座;1102、自由轴;1103、气动伸缩杆;1104、夹持块;1105、稳固片;1106、橡胶座;1107、动作捕捉传感器;12、安置组件;1201、阻尼转轴;1202、连接门;1203、放置架;1204、复位弹簧;1205、夹座;1206、防护垫;1207、直角架;1208、气动喷嘴;13、主机;14、主控板;15、4g模块;16、远程服务器;17、授权app;18、驱动模块;19、记录模块;20、分析模块;21、考核模块。
具体实施方式
27.请参阅图1-5,本发明提供一种技术方案:具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,包括安装座1和vr眼镜9,安装座1一侧安装有滑轨2,且滑轨2内部安装有调节组件3,调节组件3底部连接有仿真主控台4,且仿真主控台4一侧连接有电动伸缩杆5,电动伸缩杆5底部连接有辅助组件6,安装座1上方安置有传感器模组7,且安装座1顶部安装有显示屏8,vr眼镜9设置于安装座1一侧;
28.请参阅图1-2,调节组件3包括支撑架301和伸缩气杆302,且支撑架301内部设置有
伸缩气杆302,支撑架301关于安装座1的中心位置对称设有两组,辅助组件6包括安置座601、滑槽602、行程气杆603、扶手座604、贴合气囊605、软胶垫606和加热垫607,安置座601表面开设有滑槽602,且滑槽602内部设置有行程气杆603,行程气杆603输出端连接有扶手座604,且扶手座604内部设置有贴合气囊605,贴合气囊605表面粘接有软胶垫606,且软胶垫606中部安置有加热垫607,扶手座604与贴合气囊605嵌入式连接,且扶手座604表面呈内凹状结构;
29.具体操作如下,通过传感器模组7、伸缩气杆302与仿真主控台4之间的相互配合设置,该传感器模组7包括红外距离传感器、温度传感器、超声波传感器和记录摄像头,通过红外距离传感器可检测培训人员的合适作业距离,配合温度传感器与记录摄像头可检测是否为培训人员还是路过的行人,并通过超声波传感器将所测信心上传至主机13并由此控制伸缩气杆302带动仿真主控台4沿滑轨2滑动,使得该装置能够自动根据培训者的身高调节培训作业是设备的高度,方便其使用,同时通过仿真主控台4、电动伸缩杆5与辅助组件6之间的相互配合设置,在电动伸缩杆5的带动下能够驱动安置座601与仿真主控台4之间的间距,配合其表面开设的滑槽602,使得在行程气杆603的带动下能够控制扶手座604的位置,从而方便不同习惯的人员使用,该扶手座604表面设置有贴合气囊605,使得手部放置其内部时能够被包裹,配合软胶垫606在和加热垫607使其长时间手术中能够减小培训者的不适感,提升其舒适度;
30.请参阅图1和图3,仿真主控台4底部连接有六轴自由操作杆10,且六轴自由操作杆10内部连接有夹持组件11,夹持组件11包括夹持座1101、自由轴1102、气动伸缩杆1103、夹持块1104、稳固片1105、橡胶座1106和动作捕捉传感器1107,且夹持座1101外部连接有自由轴1102,夹持座1101内部设置有气动伸缩杆1103,且气动伸缩杆1103输出端连接有夹持块1104,夹持块1104内壁粘接有稳固片1105,夹持座1101底部设置有橡胶座1106,且橡胶座1106内部嵌入有动作捕捉传感器1107,夹持块1104通过气动伸缩杆1103与夹持座1101构成伸缩结构,且夹持块1104关于夹持座1101的内部呈圆周转分布,且橡胶座1106内壁呈弧状结构,动作捕捉传感器1107通过橡胶座1106与夹持座1101构成固定连接,且橡胶座1106一端呈长条状结构,而且橡胶座1106内壁呈c字状结构;
31.具体操作如下,通过仿真主控台4、六轴自由操作杆10与夹持组件11之间的相互配合设置,可将模拟器械放置于夹持座1101内部,并通过气动伸缩杆1103的推动使得夹持块1104能够靠近并贴合在模拟器械外部,配合稳固片1105能够提升其模拟器械之间连接的牢固性,此过程能够方便夹持不同尺寸的培训器械,提升了该装置的通用性,同时通过动作捕捉传感器1107通过橡胶座1106扣合在模拟器械外部,使得在培训过程中能够实时记录培训人员的动作,方便后期寻找自己术中的不足;
32.请参阅图1和图4,安装座1一侧安置有安置组件12,且安置组件12包括阻尼转轴1201、连接门1202、放置架1203、复位弹簧1204、夹座1205、防护垫1206、直角架1207和气动喷嘴1208,阻尼转轴1201外部设置有连接门1202,且连接门1202内壁设置有放置架1203,放置架1203一侧连接有复位弹簧1204,且复位弹簧1204另一端连接有夹座1205,夹座1205内壁设置有防护垫1206,放置架1203两侧均连接有直角架1207,且直角架1207内部安装有气动喷嘴1208,夹座1205通过复位弹簧1204与放置架1203构成弹性连接,且夹座1205与夹座1205滑动连接,而且夹座1205呈匚状结构,并且夹座1205与vr眼镜9相互贴合;
33.具体操作如下,通过安置组件12与vr眼镜9之间的相互配合设置,在拉动连接门1202时使其能够沿阻尼转轴1201转动打开,并通过放置架1203在使用结束后能够将vr眼镜9放置在其内部隐藏于安装座1内部,进一步提升对vr眼镜9的防护性,进一步通过直角架1207与气动喷嘴1208能够对眼镜外部进行吹气清洁,减小其外部杂质与镜片表面灰尘的干扰,该放置架1203通过可活动的夹座1205能够牢固卡住vr眼镜9避免其无故脱落损坏的情况。
34.请参阅图1和图5,安装座1一侧设置有主机13,且主机13内部设置有主控板14,主控板14与4g模块15相连接,且4g模块15与远程服务器16相连接,远程服务器16与授权app 17相连接,主控板14与驱动模块18相连接,且驱动模块18与记录模块19相连接,记录模块19与分析模块20相连接,且分析模块20与考核模块21相连接,记录模块19能够将培训人员的模拟视频与手术动作统统记录,并将其复制进资料库,用于培训者后期观察,以便找出术中不足之处加以改进;
35.具体操作如下,通过主控板14、记录模块19与分析模块20之间的相互配合设置,将培训中vr眼镜9所显示的内容记录同时还通过动作捕捉传感器1107对培训时的动作记录并上传至分析模块20中,通过分析模块20的分析检查可将术中的错误标出,并通过考核模块21将此次培训结果发送至培训者的远程设备中,一同发送的还有记录的视频内容中的错误点与建议改进点,方便培训者快速找到自身的不足并加以改进。
36.综上,具有交互反馈功能的耳鼻喉3d可视化模拟手术培训系统,使用时,首先通过授权app17登录至远程服务器16中进行培训前登记,随后培训者站在设备面前,通过传感器模组7,该传感器模组7包括红外距离传感器、温度传感器、超声波传感器和记录摄像头,通过红外距离传感器可检测培训人员的合适作业距离,配合温度传感器与记录摄像头可检测是否为培训人员还是路过的行人,并通过超声波传感器将所测信心上传至主机13并通过主控板14将命令传达至驱动模块18中,由此控制伸缩气杆302带动仿真主控台4沿滑轨2滑动,使得该装置能够自动根据培训者的身高调节培训作业是设备的高度,方便其使用,同时将模拟器械放置于夹持座1101内部,并通过气动伸缩杆1103的推动使得夹持块1104能够靠近并贴合在模拟器械外部,配合稳固片1105能够提升其模拟器械之间连接的牢固性,此过程能够方便夹持不同尺寸的培训器械,提升了该装置的通用性,接着在电动伸缩杆5的带动下能够驱动安置座601与仿真主控台4之间的间距,配合其表面开设的滑槽602,使得在行程气杆603的带动下能够控制扶手座604的位置,从而方便不同习惯的人员使用,该扶手座604表面设置有贴合气囊605,使得手部放置其内部时能够被包裹,配合软胶垫606在和加热垫607使其长时间手术中能够减小培训者的不适感,提升其舒适度,随后取出vr眼镜9带上,并跟随设备进行模拟手术,通过动作捕捉传感器1107通过橡胶座1106扣合在模拟器械外部,使得在培训过程中能够实时记录培训人员的动作,并同时将vr眼镜9所显示的内容记录并投射在显示屏8中,方便观察者查看,同时将记录视频内容上传至分析模块20中,通过分析模块20的分析检查可将术中的错误标出,并通过考核模块21将此次培训结果发送至培训者的远程设备中,并随之一同发送的还有记录的视频内容中的错误点与建议改进点,方便培训者快速找到自身的不足并加以改进,该系统不仅方便不同习惯的医护人员使用,同时还能够快速找出培训者模拟手术操作中的不足,进而能够快速提升培训者的手术经验。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。