1.本发明涉及自主机器人和配备于这种机器人上以便于机器人在任何类型地形例如楼梯上移动的装置的技术领域,本发明特别涉及适于跨越任何类型地形的可变形轮和配备有至少一个这种轮的自主机器人。
背景技术:
2.用于能同时在平坦地形上移动和跨越障碍物(如楼梯)的可变形轮(尤其是用于轮椅的可变形轮)是已知的。
3.例如,存在一些配有机械装置的轮,这些机械装置通过展开形成允许轮抓住台阶的突起。轮的外径因此增加,但是轮轴线和支撑点之间的距离也增加,而这存在需要更大的动力力矩作用的缺点。这种轮例如在文献us2011/0127732中有描述。
4.还存在一些无论轮构型如何其外径都保持不变的可变形轮。例如,文献w02018/050370中描述的轮就是这种情况。该文献中描述了一种轮系统,其包括两个分离且相同的具有多个分支的十字形部件,这两个部件通过围绕轮轴线的枢轴连接件而彼此连接,从而在两个位置之间枢转。
5.第一位置适于在平坦地形上的移动,在第一位置,两个部件围绕中心轴线相对于彼此成角度地偏移,以便在垂直于轮轴线的平面内形成完整的圆盘。
6.第二位置适于在楼梯上的移动,在第二位置,两个分离的部件围绕轮轴线彼此成角度地偏移,以便一个部件完全覆盖另一个部件。
7.这两个分离的部件是相同的,它们各自形成直径相同的一个圆盘,圆盘的周沿与地面持久接触,当处于第一位置时,圆盘形成一个近似连续的踏面。
8.这种轮系统的缺点在于从一个位置到另一个位置的转换。实际上,当分离部件中的一个相对于另一个偏移时,它们的形成踏面的外周保持与地面持久接触,从而产生摩擦。如果要运输的负载很大,这种摩擦就更大、更麻烦。
技术实现要素:
9.因此,本发明的目的是提出一种轮,其允许在任何类型的地形上滚动,便于通过障碍物例如楼梯台阶,减轻了上述缺点。
10.本发明的另一个目的是提供一种配有至少一个这样的轮的自主机器人。
11.因此,本发明的目的是一种轮,包括:
[0012]-第一部件,被驱动而绕中心旋转轴线旋转,配有内接在直径等于轮直径的圆中的多个分支,所有分支的圆形外表面形成轮踏面的第一部分,
[0013]-第二部件,能相对于第一部件在第一位置和第二位置之间活动,所述第二部件包括内接在圆心过中心旋转轴线的圆中的多个分支,
[0014]-位置转换装置,用于从一位置转换到另一位置和反过来从另一位置转换到一位置,第一位置对应于轮的闭合位置,在所述闭合位置,轮具有形成连续圆形踏面的完整圆
周,第二位置对应于轮的打开位置,在所述打开位置,轮没有完整圆周而形成非连续圆形踏面。根据本发明的主要特征,轮包括由多个齿件组成的第三部件,这些齿件的圆形外表面形成轮踏面的第二部分,这些齿件能枢转地安装在第一部件的枢轴销上、由第二部件的运动驱动并且能够在两个位置之间移动。
附图说明
[0015]
本发明的目的、目标和特征在阅读以下参考附图所作的描述时将变得更加清楚,附图中:
[0016]
图1示出了根据本发明的轮的第一部件的前视图,
[0017]
图2示出了根据本发明的轮的第二部件的前视图,
[0018]
图3示出了根据本发明的轮的齿件的透视图,
[0019]
图4a示出了根据本发明的处于闭合位置的轮的内部的第一俯视图,
[0020]
图4b示出了根据本发明的处于打开位置的轮的内部的俯视图,
[0021]
图5a示出了根据本发明的轮的第四部件的透视图,
[0022]
图5b示出了根据本发明的第四部件的俯视图,
[0023]
图6a示出了根据本发明的处于闭合位置的轮的第五部件的透视图,
[0024]
图6b示出了根据本发明的处于打开位置的轮的第五部件的透视图,
[0025]
图7示出了根据本发明的处于打开位置的轮的内部的第二俯视图,
[0026]
图8示出了处于闭合位置的完整轮的透视图,
[0027]
图9示出了处于打开位置的完整轮的透视图。
具体实施方式
[0028]
根据本发明的轮包括由至少一个半壳101组成的外部部件100,在图1中参考图中所示的参考系按xy平面以前视图示出该半壳。由半壳101形成的部件100内接在一圆中,该圆这样限定而成:轮的旋转轴线150穿过其圆心且圆的直径对应于轮直径。由半壳101形成的部件100的中心对称轴线通过轮的旋转轴线150并且平行于图中的z轴。半壳101包括相同的且以均匀的方式相对于彼此成角度地偏移的多个分支110。分支的数量在3至10之间,优选等于6。每个分支110包括相对于中心旋转轴线150的远端边缘112、前缘111和后缘113。每个分支的由远端边缘112形成的外表面以对应于轮的曲率半径的曲率半径弯曲。每个分支110具有位于远端边缘112附近的枢轴销120。
[0029]
由半壳101形成的第一部件100在其中央部分包括彼此等距且位于距旋转轴线150相等的距离处的三个滚动体131、132、133。半壳101还包括位于围绕轴线150的圆内和在圆形孔口162内的滚珠轴承160。
[0030]
轮包括图2中以俯视图所示的第二部件200。第二部件是平的,具有通过轮的旋转轴线150的中心旋转轴线和多个分支210,该多个分支的数量对应于半壳101的分支110的数量。部件200包括圆形的贯通的中心空腔201,该圆形的贯通的中心空腔的直径优选对应于半壳101的圆形孔口162的直径。
[0031]
部件200在其中央部分和围绕中心空腔201具有彼此等距且位于距旋转轴线150相等的距离处的三个圆弧形凹槽231、232和233。三个凹槽231、232和233具有相同的形状。三
个凹槽231、232和233中的每一个都具有上边缘、平行于上边缘并且比上边缘更靠近旋转轴线150的下边缘、以及两个半圆形端部边缘。凹槽231、232和233的尺寸设定成使得滚动体131、132和133能够在凹槽中自由滑动。
[0032]
部件200还在其每个分支210中包括呈细长形状和具有恒定宽度的弯曲凹槽240。每个凹槽240具有两个端部,其中第一端部位于旋转轴线150侧上,第二端部位于分支210端部侧上。凹槽240的第一端部在第一圆的圆周上对齐,该第一圆的圆心与部件200的对称轴线重合。凹槽240的第二端部在第二圆的圆周上对齐,该第二圆的圆心与部件200的对称轴线重合,并且第二圆的直径大于第一圆的直径。最靠近旋转轴线150的凹槽端部称为近端,附图标记为241,最远离对称轴线的端部称为远端,附图标记为242。
[0033]
根据本发明的轮还包括由多个齿件310组成的第三部件300,齿件的数量对应于分支110和分支210的数量,因此根据本发明的优选实施方式,轮包括六个相同的齿件310,其中一个齿件在图3中以透视图示出。每个齿件310包括弯曲的外表面312,该弯曲的外表面的曲率半径对应于轮的曲率半径。齿件310还包括通腔320和滚动体340,根据图中所示的参考系,该滚动体适于绕其平行于z轴的轴线自由旋转。
[0034]
如图4a和4b中可看到的,轮的部件200安置在由半壳101形成的第一部件上,以使滚动体131、132和133位于三个相应的凹槽231、232和233内。在该位置,半壳101和部件200的对称轴线与轮的旋转轴线150对齐。部件200能相对于部件100活动。部件200能够围绕其旋转轴线在两个位置之间旋转。第一位置即:半壳101的滚动体131、132和133分别被锁定在每个圆弧形凹槽213、232和233的第一端部的位置;第二位置即:半壳101的滚动体131、132和133分别抵靠每个圆弧形凹槽231、232和233的第二端部定位的位置。凹槽231、232和233的尺寸设定成使得滚动体131、132和133压靠在各凹槽的上边缘上。这是为了更好地分配力。
[0035]
齿件310可枢转地安装在由半壳101形成的第一部件100上并且由第二部件200的运动驱动。每个齿件310被定位成使得其通腔被半壳101的枢轴销120穿过,以便每个齿件能够围绕与其连接的枢轴销120旋转。另一方面,每个齿件的滚动体340位于第二部件200的凹槽240内,当部件200从一个位置转换到另一个位置时,凹槽240的宽度的尺寸设定成使得滚动体340能够从凹槽的近端241滑动到远端242,反之亦然。图4a和图4b中,齿件310的滚动体340以虚线示出,因为它们位于齿件310的隐藏面上。齿件310能在两个位置之间活动。
[0036]
在图4a所示的部件200的第一位置,齿件310的滚动体340位于第二部件200的凹槽240的远端。该位置对应于轮的闭合位置。在该位置,齿件310被布置成使得它们的外表面312处在直径为轮直径的圆的圆周上。在该位置,半壳101的分支110的前缘不可见。
[0037]
在图4b所示的部件200的第二位置,齿件310的滚动体340位于第二部件200的凹槽240的近端。该位置对应于轮的打开位置。在该位置,齿件310呈星形布置并且它们的外表面312沿着半壳101的分支110的后缘113延伸,使得半壳101的分支110的前缘111可见。
[0038]
根据本发明的轮通过例如由参考附图5a、5b、6a和6b详细描述的机械零件400和500限定的机械凸轮和滚轮装置、以及通过轮外驱动装置从一个位置转换到另一个位置。
[0039]
滑动机械零件400在图5a中以透视图、在图5b中以俯视图示出。滑动机械零件主要包括圆柱体401、至少一个优选为三个的滚动体431、432和433以及通过圆柱体401的对称轴线的滑动轴450。三个滚动体彼此等距地固定在圆柱体401的侧表面上并且能够围绕它们的
旋转轴线自由旋转。三个滚动体的旋转轴线在圆柱体的对称轴线上相交。
[0040]
滑动机械零件400与零件500配合,这两个零件在图6a和6b中一起示出。中空圆柱体形式的零件500在其中央包括圆柱形式的通腔501,该通腔的对称轴线通过零件500的对称轴线。零件500在其内壁上包括至少一个凹槽,优选地包括位于零件500的圆柱体上相同高度处的三个相同的螺旋形凹槽。这样,每个凹槽的第一端部彼此等距并且彼此成角度地偏移60度角,如图6a和6b中可看到的,图中相应凹槽531、532和533的端部541、542和543可见。每个凹槽的第一端部位于距第二端部40度至60度之间的角距离处。
[0041]
通腔的直径的尺寸设定成使得圆柱体401能够在不受壁阻碍的情况下在通腔内自由滑动。滚动体431、432和433的尺寸设定成使它们在凹槽531、532和533中从一端部滑动到另一端部,反之亦然。
[0042]
滑动机械零件400沿其滑动轴450即沿轮轴线150的方向按箭头403的平移驱使零件500按箭头503旋转。当零件400移动以便滚动体从凹槽的一端部转换到凹槽的另一端部时,零件500绕其对称轴线旋转一个角度,该角度等于凹槽的第一端部与凹槽的第二端部分开的角距离。零件500因此从图6a所示的第一位置旋转到图6b所示的第二位置。零件500充当具有三个螺旋形凹槽的旋转圆柱形凸轮,滚动体是当滑动轴450平移时在螺旋形凹槽中移动的滚轮。
[0043]
通过图中未示出的固定装置,零件500在部件200的中央部分固定到部件200上,使得它们的对称轴线重合并且彼此对齐,如图7中可见的。零件500的对称轴线因此与轮的旋转轴线150对齐。圆柱体401容纳在第二部件200的中心空腔501中。由于滚动体431、432和433在凹槽531、532和533中滑动,滑动机械零件400沿滑动轴450的方向的平移驱使零件500围绕滑动轴450旋转。由于零件500与部件200相固连,该零件又驱动该部件绕滑动轴450旋转,从而绕轮的旋转轴线150旋转。
[0044]
用于从一个位置转换到另一个位置的机械系统具有不需要向轮提供任何电能的优点。
[0045]
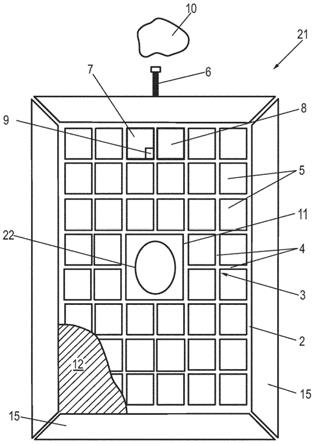
参考图8和图9,轮10以透视图完整地示出。该轮由外部部件100、活动部件200、齿件310以及在图中不可见的零件400和零件500的组件组成。根据本发明的优选实施例,轮的外部部件100还包括形状与第一半壳101基本相同的第二半壳102,该第二半壳通过固定到半壳101的远端边缘上而覆盖轮的各组成部件。第一部件100的分支的圆形外表面形成轮踏面的第一部分。由两个半壳101和102组成的外部部件100加强了轮,保护该轮免受灰尘的影响并使其更具美感。轮10安装在配有在两个极限位置之间滑动的滑动环15的轴12上。环15通过滑动机械零件的滑动轴450连接到滑动机械零件400,并且与该零件相固连,使得环15的运动驱使滑动轴450和滑动机械零件400运动。环15的两个极限位置分别对应于轮的打开或闭合位置。位于轴12上最靠近轮的位置的环对应于处于闭合位置的轮,而位于轴12上最远离轮的位置的环对应于处于打开位置的轮,如分别可在图8和9上看到的。
[0046]
如表示处于闭合位置的完整轮的透视图的图8中可见的,部件200处于其第一位置。轮具有由齿件310的一系列外表面312和分开它们的沿着部件100的远端边缘112所形成的圆形外表面所组成的连续踏面。第一部件100的所有分支110的圆形外表面形成轮踏面的第一部分,齿件310的所有外表面312的外表面形成轮踏面的第二部分。所有这两种外表面构成处于闭合位置的轮的完整圆形踏面。在这个位置,轮完美地适应于平坦地形。
[0047]
参考表示处于打开位置的完整轮的透视图的图9,部件200处于其第二位置,并且轮具有基本上垂直于踏面周向部分的前缘。在该打开位置,轮没有连续圆周,而具有适于跨越楼梯的非连续踏面。
[0048]
轮包括用于保持锁定轮的打开或闭合位置的装置。根据本发明定义的至少一个轮能够装配到自主机器人上。该机器人包括用于检测要跨越的楼梯或障碍物的存在的检测装置、和适于从用于检测要跨越的楼梯的存在的检测装置接收信号并处理接收到的信号的控制设备。检测装置可以是接近传感器、摄像机等。控制设备控制轮从打开位置到闭合位置的转换、以及反过来从闭合位置到打开位置的转换。因此,控制设备根据机器人是否从跨越平坦地形转换到不平坦地形(例如楼梯)及反之亦然来控制滑动环的移动。
[0049]
机器人包括用于将环的位置保持在位于其两个极限位置之间的一个或多个中间位置的装置。这种装置能够容置在轮的轴12中。因此,根据替代实施例,轮能够具有在闭合位置和打开位置之间的对应于不同地面上使用的一些中间位置。例如,第一中间位置对应于齿件310为50%的开度,使机器人适于在松软地形上移动,第二中间位置对应于齿件310为20%的开度,使机器人适于在雪地上移动。当保持一中间位置时,第一部件100的滚动体131、132和133位于在凹槽231、232和233的两端部之间的中间位置。
[0050]
根据本发明的轮的另一可选实施例,机器人包括用于根据地面质量和根据移动速度来控制齿件打开的装置。
[0051]
机器人优选地配备有如本发明中定义的两个轮或四个轮。这些轮成对地沿着穿过轮中心的单一旋转轴线组装在单一轴杆上或每个轮专有的轴杆上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。