1.本发明涉及对自身车辆的驾驶员报知对向车辆的存在的车辆的报知装置。
背景技术:
2.这种车辆的报知装置之一(以下也被称为“现有装置”。)在自身车辆停止且右方的方向指示器工作的情况下,在到对向车辆到达自身车辆的预想右转轨迹为止的时间比预定时间少时,对车辆的驾驶员进行报知(例如参照专利文献1。)。该进行报知的处理也被称为“对向车辆报知处理”或者“报知处理”。
3.现有技术文献
4.专利文献1:日本特开2004-280453号公报
技术实现要素:
5.预想右转轨迹(即自身车辆的预想行驶路径)例如能够基于当前时间点的自身车辆的转向角度来取得。在该情况下,若自身车辆的驾驶员未开始用于右转的转向操作,则不执行对向车辆报知处理。
6.然而,希望在尽量早的定时(例如驾驶员开始用于右转的转向操作之前的定时)开始对向车辆报知处理。另一方面,希望尽量避免不必要地执行对向车辆报知处理。
7.于是,本发明的目的之一在于提供一种车辆的报知装置,其能够提前开始对驾驶员报知对向车辆的存在的报知动作,并且,执行不必要的报知动作的可能性低。
8.用于达成上述目的的车辆的报知装置(以下也被称为“本发明装置”。)具备周围传感器、方向指示器、报知器以及控制单元。
9.所述周围传感器(前方摄像头41)取得“周围信息”,“周围信息”包括关于存在于自身车辆的前方区域的目标物以及所述自身车辆所行驶的道路上的区划线的信息。
10.所述方向指示器(方向指示器43)通过所述自身车辆的驾驶员的预定操作,状态被从非工作状态(熄灭状态)变更为工作状态(闪烁状态)。
11.所述报知器(显示器46和扬声器47)进行用于对所述驾驶员报知所述驾驶员应该注意的其他车辆的存在的“报知动作”。
12.所述控制单元(ecu21~ecu29等)对所述报知器进行控制(参照步骤630和步骤640等。)。
13.而且,所述控制单元基于所述周围信息判定是否存在“对向车辆”,该“对向车辆”是在相对于所述自身车辆所行驶的行驶车道的“对向车道”上以从所述自身车辆的前方向该自身车辆接近的方式行驶的其他车辆,并且,是该其他车辆的“预想行驶路径”在相对于所述自身车辆的当前位置为右方和左方中的一方的“特定方向侧”通过的其他车辆。
14.进而,所述控制单元在判定为了“预先确定的特定条件”已成立时(例如参照图6的步骤645为“是”、步骤650为“是”等。),使所述报知器开始所述报知动作(例如步骤630),所述“预先确定的特定条件”在所述方向指示器中的与所述自身车辆的所述特定方向对应的
方向指示器处于所述工作状态、且判定为存在所述对向车辆、且预测为所述自身车辆开始向所述特定方向的转弯的可能性高的情况和在所述自身车辆开始向所述特定方向的转弯之前所述自身车辆的驾驶员应该识别到所述对向车辆的存在的情况中的任一情况下成立。
15.特定方向例如在左侧通行的地域(车辆在道路的左侧行驶的地域)中为右方,在右侧通行的地域(车辆在道路的右侧行驶的地域)中为左方。也就是说,特定方向是自身车辆进行右转或者左转时横穿对向车道的方向。在自身车辆行驶在左侧通行的区域中的情况下,当在对向车辆的预想行驶路径在自身车辆的右方通过的状况下自身车辆向右方转弯时,自身车辆有可能与对向车辆碰撞。于是,即使是在自身车辆开始向特定方向的转弯之前的时间点,在预测(推定)为自身车辆开始向所述特定方向的转弯的可能性高的情况下成立的预先确定的特定条件已成立时,也开始报知动作。
16.换言之,即使自身车辆的驾驶员未开始用于右转的转向操作,当特定条件成立时,也开始报知动作(对向车辆报知处理)。另一方面,若特定条件不成立,则不开始报知动作。因此,根据本发明装置,能够在由驾驶员进行的转向开始之前的时间点开始报知动作(对驾驶员报知驾驶员应该注意的对向车辆的存在),并且,能够降低报知动作被不必要地进行的可能性。
17.在本发明装置的几个技术方案中,
18.所述控制单元基于所述周围信息判定如下条件(即特定区域条件)是否成立(例如步骤645),该条件在包含所述自身车辆向所述特定方向转弯时通过的区域的一部分、且相对于所述自身车辆预先确定的特定区域(例如右转通过区域)中不包含划定所述行驶车道的一对(左右的)区划线中的所述特定方向侧的区划线(即特定区划线,参照lt1、lt2、lt3以及lt4等。)的情况下成立。
19.进而,所述控制单元在判定为了所述特定区域条件成立的情况下,判定为所述特定条件已成立,使报知器开始报知动作(参照例如从步骤645的“是”进入到了步骤630的情况。)。
20.在与“特定方向”对应的自身车辆的方向指示器处于工作状态、且特定区域中不包含特定区划线的情况下(在特定区域条件成立的情况下),自身车辆正要在交叉路口向特定方向侧转弯的可能性高。因此,在该情况下,开始报知动作。
21.在本发明装置的几个技术方案中,
22.所述控制单元构成为,
23.基于所述周围信息判定转弯待机条件是否成立,
24.在判定为了所述转弯待机条件成立的情况下,判定为所述特定条件已成立。
25.转弯待机条件是在所述特定区域中包含所述特定区划线(步骤645:否)、且所述自身车辆的行驶速度比预定的第1阈值速度(vth1)小时(步骤650:是)成立的条件。
26.有时在自身车辆在交叉路口以外的场所向特定方向转弯时与对向车辆碰撞的可能性会变高。希望在该情况下也执行报知动作。
27.当自身车辆在交叉路口以外的场所向特定方向转弯时,特定区划线包含于特定通过区域的情况较多。而且,多数情况下,驾驶员会在使自身车辆向特定方向转弯之前使自身车辆的行驶速度降低。因此,在自身车辆正要在交叉路口以外的场所向特定方向转弯的情况下,转弯待机条件成立。由此,即使是在自身车辆在交叉路口以外的场所向特定方向转弯
的情况下,也能够合适地进行报知动作。
28.另一方面,例如,驾驶员有时为了从左侧通行的地域中的最左侧的车道向位于该车道的右侧的车道(不是对向车道,一般被称为超车车道。)进行车道变更而使与特定方向对应的方向指示器进行工作。在该情况下,自身车辆的行驶速度大多会比第1阈值速度大,因此,转弯待机条件不成立,由此,不进行报知动作。因此,能够降低在进行车道变更的情况不必要地进行报知动作的可能性。
29.在本发明装置的几个技术方案(例如第1变形例)中,
30.所述控制单元构成为,
31.基于所述周围信息判定是否存在前行车辆(图8的步骤820),该前行车辆是位于紧邻所述自身车辆之前的位置的其他车辆,
32.在判定为了存在所述前行车辆的情况下,判定所述前行车辆的速度是否比预定的前行车辆转弯阈值速度(vth2)大,
33.在判定为了所述前行车辆的速度比所述前行车辆转弯阈值速度大时,判定为所述特定条件已成立(步骤820:是)。
34.例如,前行车辆的驾驶员有时会未注意到对向车辆的存在而在交叉路口开始向特定方向的转弯。或者,有时前行车辆的驾驶员要与对向车辆到达交叉路口相比先在交叉路口进行向特定方向的转弯。在这些情况下,自身车辆的驾驶员有可能误解为不存在对向车辆。于是,在上述技术方案中,在判定为了前行车辆的速度比所述前行车辆转弯阈值速度大时,判定为所述特定条件已成立,进行报知动作。
35.在本发明装置的几个技术方案(例如第2变形例)中,
36.所述控制单元构成为,
37.基于所述周围信息判定是否存在前行车辆,该前行车辆是位于紧邻所述自身车辆之前的位置的其他车辆,
38.在判定为了存在所述前行车辆的情况下,基于所述周围信息判定所述前行车辆是否开始了向所述特定方向的转弯(图10的步骤1020),
39.在判定为了所述前行车辆开始了向所述特定方向的转弯时,判定为所述特定条件已成立(步骤1020:是)。
40.根据该技术方案,即使是前行车辆的驾驶员未注意到对向车辆的存在而在交叉路口开始向特定方向的转弯、要与对向车辆到达交叉路口相比先在交叉路口进行向特定方向的转弯的情况下,也判定为特定条件已成立。由此,进行报知动作。
41.在本发明装置的几个技术方案(例如第3变形例)中,
42.所述控制单元构成为,
43.基于所述周围信息判定所述对向车辆所行驶的所述对向车道与所述自身车辆的所述行驶车道是否相互相邻(图12的步骤1245),
44.在判定为了所述对向车辆所行驶的所述对向车道与所述自身车辆的所述行驶车道相互相邻时,判定为所述特定条件已成立(步骤1245:是)。
45.在对向车辆行驶在与行驶车道在特定方向侧相邻的车道上的情况下,若与特定方向对应的自身车辆的方向指示器处于工作状态,则自身车辆横穿对向车道所行驶的车道的可能性高。即,对向车辆行驶在与行驶车道在特定方向侧相邻的车道上的情况,是在自身车
辆开始向特定方向的转弯之前,自身车辆的驾驶员应该识别到对向车辆的存在的情况。因此,在上述技术方案中,在判定为了对向车辆所行驶的对向车道与自身车辆的行驶车道相互相邻时,判定为特定条件已成立。由此,在该情况下进行报知动作。
46.在本发明装置的几个技术方案(例如第3变形例)中,
47.所述控制单元构成为,
48.基于所述周围信息判定横向距离(|dx|)是否比预定的第1阈值距离(dth1)小(图12的步骤1250),所述横向距离是从所述自身车辆到所述对向车辆为止的所述自身车辆的宽度方向上的距离,
49.在判定为了所述横向距离比所述第1阈值距离小时,判定为所述特定条件已成立(步骤1250:是)。
50.在从自身车辆到对向车辆为止的横向距离小的情况下,若与特定方向对应的自身车辆的方向指示器处于工作状态,则自身车辆有可能在刚开始了操作之后接近对向车辆。即,从自身车辆到对向车辆为止的横向距离小的情况,是在自身车辆开始向特定方向的转弯之前,自身车辆的驾驶员应该识别到对向车辆的存在的情况。因此,在上述技术方案中,在判定为了横向距离比第1阈值距离小时,判定为特定条件已成立。由此,在该情况下进行报知动作。
51.在本发明装置的几个技术方案(例如第4变形例)中,
52.所述控制单元构成为,
53.基于所述周围信息判定是否存在横穿车辆(图14的步骤1450),所述横穿车辆是与所述对向车辆不同的其他车辆、且是该其他车辆的预想行驶路径与所述对向车辆的预想行驶路径交叉的其他车辆,
54.在包括存在所述横穿车辆这一条件的禁止条件已成立的情况下,禁止所述报知动作的执行(步骤1450:否)。
55.在本发明装置的几个技术方案(例如第4变形例)中,
56.所述控制单元构成为,
57.基于所述周围信息判定是否存在横穿车辆(图14的步骤1450),所述横穿车辆是与所述对向车辆不同的其他车辆、且是该其他车辆的预想行驶路径与所述自身车辆的预想路径交叉的其他车辆,
58.在包括存在所述横穿车辆这一条件的禁止条件已成立的情况下,禁止所述报知动作的执行(步骤1450:否)。
59.自身车辆的驾驶员在识别到横穿车辆的情况下,使自身车辆减速的可能性高。因此,在上述几个技术方案中,在包括存在横穿车辆这一条件的禁止条件已成立的情况下,禁止报知动作的执行。由此,能够降低不必要地执行报知动作的可能性。
60.在本发明装置的几个技术方案(例如第6变形例)中,
61.所述控制单元构成为,
62.基于所述周围信息判定横向距离(|dx|)是否为横向阈值距离(dth3、dth4)以上(图19的步骤1950和步骤1955),该横向距离是从所述自身车辆到所述对向车辆为止的所述自身车辆的宽度方向上的距离,所述自身车辆的行驶速度越大,则所述横向阈值距离越大,
63.在包括所述横向距离为所述横向阈值距离以上这一条件的禁止条件已成立的情
况下,禁止所述报知动作的执行(步骤1950:否,步骤1955:否)。
64.自身车辆的行驶速度越小,则到达对向车辆的预想行驶路径(对向车辆预想路径)为止的时间(交点到达时间)越长。而且,自身车辆的车宽方向上的与对向车辆的距离(横向距离(|dx|)越大,则交点到达时间越长。当交点到达时间变长时,在自身车辆到达对向车辆预想路径之前驾驶员识别到对向车辆的存在的可能性变高。因此,在上述实施方式中,在包括横向距离为所述横向阈值距离以上这一条件的禁止条件已成立的情况下,禁止报知动作的执行。由此,能够使不必要地执行报知动作的可能性降低。
65.在上述的“对横向距离与横向阈值距离进行比较的实施方式”中,更具体而言,
66.所述控制单元构成为,
67.在所述自身车辆的行驶速度为第4阈值速度(vth4)以下的情况下,基于所述周围信息判定横向距离是否为第3阈值距离(dth3)以上,该横向距离是从所述自身车辆到所述对向车辆为止的所述自身车辆的宽度方向上的距离(图19的步骤1945和步骤1950),
68.在包括所述自身车辆的行驶速度为所述第4阈值速度以下、且所述横向距离为所述第3阈值距离以上这一条件的禁止条件已成立的情况下,禁止所述报知动作的执行(步骤1950:否)。
69.同样,在上述的“对横向距离和横向阈值距离进行比较的实施方式”中,更具体而言,
70.所述控制单元构成为,
71.在所述自身车辆的行驶速度比所述第4阈值速度(vth4)大的情况下,基于所述周围信息判定“作为从所述自身车辆到所述对向车辆为止的所述自身车辆的宽度方向上的距离的横向距离”是否为“比所述第3阈值距离大的第4阈值距离(dth4)”以上(图19的步骤1945和步骤1955),
72.在包括所述自身车辆的行驶速度比所述第4阈值大、且所述横向距离为所述第4阈值距离以上这一条件的禁止条件已成立的情况下,禁止所述报知动作的执行(步骤1955:否)。
73.本发明装置的几个技术方案(例如第7变形例)中,具备:
74.转向角度传感器(45),对所述自身车辆的方向盘的操作角度进行检测;和
75.制动器踏板操作状态传感器(48),对所述自身车辆的制动器踏板的操作状态进行检测。
76.进而,该实施方式的控制单元,判定将以下描述的全部条件成立这一情况作为成立的前提条件而具有的禁止条件是否成立,在该禁止条件已成立的情况下,禁止所述报知动作的执行。
77.·
所述检测到的操作角度(θs)为与使所述自身车辆转弯以使得横穿所述对向车道的方向相反的方向的值、或者所述检测到的转向角度为使所述自身车辆转弯以使得横穿所述对向车道的方向的值,且该转向角度的大小比阈值角度(θth)小(图20的步骤2050:是)。
78.·
所述检测到的所述制动器踏板的操作状态表示是所述制动器踏板被进行操作的状态(图20的步骤2055:是)。
79.·
所述自身车辆的行驶速度为第5阈值速度以下(图20的步骤2060:是)。
80.若自身车辆的驾驶员识别到对向车辆的存在,则在开始向特定方向的转弯之前,驾驶员使自身车辆减速的可能性高。因此,若制动器踏板被进行操作,则驾驶员识别到对向车辆的存在的可能性高。另一方面,在处于方向盘被向特定方向操作了比阈值角度(θth)大的角度的状态时,驾驶员未识别到对向车辆的存在的可能性高。进而,在自身车辆的行驶速度比第5阈值速度大时,驾驶员未识别到对向车辆的存在的可能性高。因此,根据上述实施方式,能够降低在自身车辆的驾驶员识别到对向车辆的存在的可能性高的情况下执行报知动作的可能性。
81.在本发明装置的几个技术方案(例如第5变形例)中,所述报知器包括产生声音的扬声器(47)和进行显示的显示器(46)。
82.进而,所述控制单元构成为,
83.在判定为了作为已被判定为是所述对向车辆的车辆与所述自身车辆的距离的纵向距离比预定的第2阈值距离小、且该已被判定为是所述对向车辆的车辆的目标物行驶速度为预定的第3阈值速度以下的情况下,判定为已被判定为是所述对向车辆的车辆已停止,
84.在判定为了已被判定为是所述对向车辆的车辆已停止的情况下保持停止历史记录,所述停止历史记录表示做出了已被判定为是所述对向车辆的车辆已停止这一判定,
85.在判定为了所述特定条件已成立的情况下未保持有所述停止历史记录时,开始使用了所述扬声器和所述显示器这两方的报知动作(图16的步骤1650:否,步骤1630和步骤1632),
86.在判定为了所述特定条件已成立的情况下保持有所述停止历史记录时,开始不使用所述显示器而使用了所述扬声器的报知动作(图16的步骤1650:是,步骤1632)。
87.在对向车辆已停止(暂时停止)的情况下,该对向车辆存在于自身车辆的驾驶员的视野内的时间变长。由此,自身车辆的驾驶员注意到该对向车辆的可能性变高。因此,通过在保持有停止历史记录时进行不使用显示器而使用了所述扬声器的报知动作,能够降低驾驶员对显示器的显示感到麻烦的可能性。
88.在本发明装置的几个技术方案(例如第5变形例的变形例)中,
89.所述控制单元构成为,
90.在判定为了作为已被判定为是所述对向车辆的车辆与所述自身车辆的距离的纵向距离比预定的第2阈值距离小、且该已被判定为是所述对向车辆的车辆的目标物行驶速度为预定的第3阈值速度以下的情况下,判定为已被判定为是所述对向车辆的车辆已停止,
91.在判定为了已被判定为是所述对向车辆的车辆已停止的情况下保持停止历史记录,所述停止历史记录表示做出了已被判定为是所述对向车辆的车辆已停止这一判定,
92.在判定为了所述特定条件已成立的情况下未保持有所述停止历史记录时,使所述报知动作开始,
93.在判定为了所述特定条件已成立的情况下保持有所述停止历史记录时,禁止所述报知动作。
94.根据该实施方式,在由于对向车辆已暂时停止(保持有停止历史记录)而自身车辆的驾驶员注意到对向车辆的可能性高的情况下,禁止报知动作。因此,能够降低在自身车辆的驾驶员识别到对向车辆的存在的可能性高的情况下执行报知动作的可能性。
95.在本发明装置的几个技术方案(例如第8变形例)中,
96.所述控制单元构成为,
97.基于与所述检测到的转向角度相应的参数判定预先确定的第1报知结束条件是否成立,所述第1报知结束条件在所述自身车辆已停止向所述特定方向的转弯的可能性高时成立(图22的步骤2210),
98.在所述报知动作的执行期间判定为了所述第1报知结束条件成立时,使所述报知动作结束(图22的步骤2210:是,图22的步骤640)。
99.第1报知结束条件例如是在自身车辆的方向盘被以比预定的阈值角速度大的角速度向特定方向的相反方向进行了操作时成立的条件。当基于操作状态判定为第1报知结束条件成立时,结束报知动作。
100.在本发明装置的几个技术方案(例如第8变形例)中,
101.所述控制单元构成为,
102.在所述报知动作的执行期间判定为不存在所述对向车辆的状态持续了第3阈值时间以上时(参照图22的步骤2255和步骤2270。),使所述报知动作结束(步骤2265:是,图22的步骤640)。
103.可能存在如下情况:由于周围传感器的检测精度的暂时性的降低而虽然实际存在对向车辆却暂时性判定为不存在对向车辆。在该情况下,可能产生如下状况:在由于误判定为了不存在对向车辆而报知动作已结束之后,立刻由于正确地判定为了存在对向车辆而重新开始报知动作。在该情况下,驾驶员感到违和感的可能性高。因此,持续进行报知动作,直到判定为不存在对向车辆的状态持续第3阈值时间。并且,在可靠地变为了不存在对向车辆的时间点结束报知动作。
104.在本发明装置的几个技术方案中,
105.所述控制单元构成为(参照图6的步骤635。):
106.在所述报知动作的执行期间,在与所述自身车辆的所述特定方向对应的所述方向指示器从所述工作状态变化为了所述非工作状态的情况(条件(c1))和所述自身车辆已停止的情况(条件(c3))中的至少一方的情况下使所述报知动作结束。
107.在上述说明中,为了有助于理解本发明,对于与后述的实施方式对应的发明的构成,以写入括号的方式添加了在该实施方式中使用的名称和/或标号。但是,本发明的各构成要素不限定于由所述名称和/或标号规定的实施方式。本发明的其他目的、其他特征以及所附带的优点可根据关于参照以下的附图记述的本发明的实施方式的说明而容易地理解到。
附图说明
108.图1是搭载本发明的实施方式的车辆的报知装置(本报知装置)的车辆(本车辆)的概略图。
109.图2是本报知装置的框图。
110.图3是表示通过本报知装置基于路径交叉报知条件和第1先行报知条件来执行对向车辆报知处理的情况下的例子的图。
111.图4是表示通过本报知装置基于路径交叉报知条件和第2先行报知条件来执行对向车辆报知处理的情况下的例子的图。
112.图5是表示第2先行报知条件不成立的情况下的例子的图。
113.图6是表示本报知装置执行的对向车辆报知判定处理例程的流程图。
114.图7是表示通过本发明的实施方式的第1变形例的车辆的报知装置(第1变形装置)基于第3先行报知条件来执行对向车辆报知处理的情况下的例子的图。
115.图8是表示第1变形装置执行的对向车辆报知判定处理例程的流程图。
116.图9是表示通过本发明的实施方式的第2变形例的车辆的报知装置(第2变形装置)基于第4先行报知条件来执行对向车辆报知处理的情况下的例子的图。
117.图10是表示第2变形装置执行的对向车辆报知判定处理例程的流程图。
118.图11是表示通过本发明的实施方式的第3变形例的车辆的报知装置(第3变形装置)基于第5先行报知条件或者第6先行报知条件来执行对向车辆报知处理的情况下的例子的图。
119.图12是表示第3变形装置执行的对向车辆报知判定处理例程的流程图。
120.图13是表示通过本发明的实施方式的第4变形例的车辆的报知装置(第4变形装置)基于第7先行报知条件来执行对向车辆报知处理的情况下的例子的图。
121.图14是表示第4变形装置执行的对向车辆报知判定处理例程的流程图。
122.图15是表示通过本发明的实施方式的第5变形例的车辆的报知装置(第5变形装置)基于对向车辆所涉及的停止历史记录来执行对向车辆报知处理的情况下的例子的图。
123.图16是表示第5变形装置执行的对向车辆报知判定处理例程的流程图。
124.图17是表示通过本发明的实施方式的第6变形例的车辆的报知装置(第6变形装置)基于第8先行报知条件来执行对向车辆报知处理的情况下的例子的图。
125.图18是表示通过第6变形装置基于第9先行报知条件来执行对向车辆报知处理的情况下的例子的图。
126.图19是表示第6变形装置执行的对向车辆报知判定处理例程的流程图。
127.图20是表示本发明的实施方式的第7变形例的车辆的报知装置(第7变形装置)执行的对向车辆报知判定处理例程的流程图。
128.图21是表示本发明的实施方式的第8变形例的车辆的报知装置(第8变形装置)执行的对向车辆报知判定处理例程的流程图。
129.图22是表示第8变形装置执行的对向车辆报知结束处理例程的流程图。
130.标号说明
131.10车辆、21车辆控制ecu、41前方摄像头、42转向指示灯杆传感器、43方向指示器、43l左方指示器、43r右方指示器、44车速传感器、45转向角度传感器、46显示器、47扬声器、48制动器踏板操作量传感器、51方向盘、51a转向指示灯杆、52其他车辆、61-67其他车辆。
具体实施方式
132.(构成)
133.以下,参照附图对本发明的实施方式的车辆的报知装置(以下也被称为“本报知装置”。)进行说明。本报知装置被应用于图1所示的车辆10。如根据作为本报知装置的框图的图2理解的那样,本报知装置包括作为电子控制单元(ecu:electronic control unit)的车辆控制ecu21。车辆控制ecu21以下也被简称为ecu21。
134.ecu21包括具备cpu31、非易失性存储器32以及ram33的微型计算机来作为主要素。cpu31通过逐次执行预定程序(例程)来进行数据的读入、数值运算以及运算结果的输出等。非易失性存储器32包括rom和能够读写的闪速存储器。非易失性存储器32存储cpu31执行的程序以及在执行程序时所参照的查找表(映射)等。ram33暂时性地存储由cpu31参照的数据。
135.ecu21与前方摄像头41、转向指示灯杆传感器42、方向指示器43、车速传感器44、转向角度传感器45、显示器46、扬声器47以及制动器踏板操作量传感器(制动器踏板操作状态传感器)48连接。
136.为了便于说明,前方摄像头41也被称为“周围传感器”。为了便于说明,显示器46和扬声器47也被称为“报知器”。
137.(构成-前方摄像头)
138.前方摄像头41配设在车辆10的车室内上部的未图示的后视镜(roommirror)附近的位置(参照图1。)。前方摄像头41每当经过预定的时间间隔δtc(固定值)时取得对车辆10前方的区域进行拍摄而得到的“前方图像”,向ecu21输出表示前方图像的数据(前方图像数据)。前方摄像头41的水平方向的视野(视角、拍摄区域)为直线lc1~直线lc2的范围(参照图1。)。
139.通过前方摄像头41最后取得的前方图像以下也被称为“最新图像”。通过前方摄像头41在紧邻最新图像之前取得的前方图像(即在取得了最新图像的时刻的时间间隔δtc以前所取得的前方图像)以下也被称为“前次图像”。
140.在以下的说明中,如图1所示,将沿着车辆10的左右方向(车宽方向)的轴称为x轴,将沿着车辆10的前后方向的轴称为y轴。车辆10的前方端部的、车辆10的左右方向的中心点是成为x=0且y=0的原点。x坐标在车辆10朝向前进的情况下的行进方向时在右方向上为正值,在车辆10朝向前进的情况下的行进方向时在左方向上为负值。y坐标在车辆10的前方向上为正值,在车辆10的后方向上为负值。
141.ecu21当接收到前方图像数据时,检测(提取)包括前方图像所包含的其他车辆和行人的立体目标物、和划定行驶车道(即车辆10行驶的车道)的一对区划线。基于前方图像检测到的立体目标物以下也被称为“摄像头检测目标物”。为了便于说明,与基于前方图像检测到的摄像头检测目标物和行驶车道有关的信息也被称为“周围信息”。
142.更具体地对摄像头检测目标物的检测方法进行描述,ecu21为了从前方图像提取立体目标物,对前方图像中的“与预先存储的大量的模板(即其他车辆和行人等的图案)中的某一个相似的部分”进行搜索。ecu21若找到与模板中的一个相似的前方图像的一部分(即前方图像中的映有立体目标物的部分),则提取与该模板对应的“前方图像中拍到的立体目标物”的轮廓。即,ecu21通过图案匹配方法提取前方图像所包含的立体目标物的轮廓。
143.ecu21当从前方图像检测到立体目标物时,取得与该立体目标物对应的模板(即对应模板)的类别来作为立体目标物的类别。在本实施方式中,立体目标物的类别(即预先存储于ecu21的模板的类别)包括“其他车辆”。
144.进而,ecu21通过周知的方法取得所检测到的立体目标物的相对于车辆10的“左端位置”和“右端位置”。左端位置和右端位置分别由x坐标值和y坐标值的组合来表示。
145.ecu21取得车辆10的前端与立体目标物的y轴方向上的距离来作为纵向位置dy。具
体而言,ecu21取得立体目标物的左端位置的y坐标值和右端位置的y坐标值中的小的值来作为纵向位置dy。
146.而且,ecu21取得立体目标物的x坐标值来作为横向位置dx。具体而言,ecu21取得立体目标物的左端位置的x坐标值和右端位置的x坐标值的平均值来作为横向位置dx。
147.此时,若立体目标物的类别为“其他车辆”、且立体目标物(即其他车辆)的前表面(前端)包含于前方图像,则ecu21取得前方图像所包含的其他车辆的前表面的左端位置(即其他车辆的前端的左角部)和右端位置(即其他车辆的前端的右角部)各自相对于车辆10的位置。同样,若立体目标物的类别为“其他车辆”、且立体目标物(即其他车辆)的后表面(后端)包含于前方图像,则ecu21取得前方图像所包含的其他车辆的后表面的左端位置(即其他车辆的后端的左角部)和右端位置(即其他车辆的后端的右角部)各自相对于车辆10的位置。
148.若从前次图像也检测到从最新图像检测到的立体目标物,则ecu21取得立体目标物的横向相对速度vx、纵向相对速度vy以及目标物行驶速度vc。横向相对速度vx表示立体目标物相对于车辆10的x轴方向上的相对速度。纵向相对速度vy表示立体目标物相对于车辆10的y轴方向上的相对速度。目标物行驶速度vc表示立体目标物相对于路面(地面)的移动速度的大小。
149.更具体地描述,ecu21取得“基于最新图像取得的横向位置dx”与“基于前次图像取得的横向位置dx即前次横向位置dpx”的差来作为横向变化量δdx(即δdx=dx-dpx)。而且,ecu21通过将横向变化量δdx除以时间间隔δtc,取得横向相对速度vx(即vx=δdx/δtc)。
150.同样,ecu21取得“基于最新图像取得的纵向位置dy”与“基于前次图像取得的纵向位置dy即前次纵向位置dpy”的差来作为纵向变化量δdy(即δdy=dy-dpy)。而且,ecu21通过将纵向变化量δdy除以时间间隔δtc,取得纵向相对速度vy(即vy=δdy/δtc)。
151.进而,ecu21取得车辆10的行驶速度即车速vs与纵向相对速度vy之和来作为目标物纵向速度vcy(即vcy=vs vy)。而且,ecu21取得目标物纵向速度vcy的平方与横向相对速度vx的平方之和的平方根来作为目标物行驶速度vc(即vc=(vcy2 vx2)
1/2
)。
152.接着,对划定前方图像所包含的行驶车道的一对区划线(具体而言为左方区划线和右方区划线)的检测方法进行说明。在本实施方式中,左方区划线和右方区划线是由白色或者黄色的实线或者虚线表示的路面标示。右方区划线例如是车道中央线和车道边界线中的某一个。为了便于说明,右方区划线也被称为“特定区划线”。
153.ecu21基于前方图像中的与路面(地面)对应的区域的色相、明度以及彩度各自的梯度,提取从车辆10的前端向前方(远方)延伸的区划线与区划线以外的区域的边界(区划线边界)。ecu21基于提取到的区划边界线,取得左方区划线和右方区划线相对于车辆10的位置。左方区划线由“某y坐标值”和“该y坐标值下的左方区划线的x坐标值”的组合的集合来表示。同样,右方区划线由“某y坐标值”和“该y坐标值下的右方区划线的x坐标值”的组合的集合来表示。
154.而且,ecu21判定是否检测到相对于车辆10而处于右方区划线的更右方的区划线(以下也称为“相邻右方区划线”。)。相邻右方区划线是与右方区划线一起划定“与行驶车道在右方相邻的车道”的区划线。由右方区划线和相邻右方区划线划定的车道以下也被称为“右方相邻车道”。
155.(构成-转向指示灯杆以及转向指示灯)
156.图2所示的转向指示灯杆传感器42检测图1所示的转向指示灯杆51a的旋转位置(具体而言为中立位置、右方位置以及左方位置中的某一位置),向ecu21输出表示旋转位置的信号。转向指示灯杆51a以相对于车辆10的驾驶员向右方延伸的方式配设于车辆10的方向盘51的转向柱。
157.转向指示灯杆51a能够以转向指示灯杆51a的基部(即转向指示灯杆51a向转向柱的固定位置)为支点(旋转中心)向右转方向和左转方向旋转(偏斜)预定角度。在转向指示灯杆51a未由驾驶员进行操作时,转向指示灯杆51a位于中立位置。
158.图2所示的方向指示器43包括右方指示器43r和左方指示器43l。如图1所示,右方指示器43r是分别配设于车辆10的前端的右角部和后端的右角部的转向指示灯(黄色灯)。左方指示器43l是分别配设于车辆10的前端的左角部和后端的左角部的转向指示灯。
159.图2所示的ecu21根据转向指示灯杆51a的操作状态(即从转向指示灯杆传感器42接收到的表示旋转位置的信号)来控制方向指示器43。具体而言,在转向指示灯杆51a的旋转位置为右方位置时(即在转向指示灯杆51a被向右转方向进行操作时),ecu21使右方指示器43r闪烁。在转向指示灯杆51a的旋转位置为左方位置时(即在转向指示灯杆51a被向左转方向进行操作时),ecu21使左方指示器43l闪烁。在左方指示器43l和右方指示器43r中的一方闪烁的情况下,表现为该闪烁的方向指示器的状态是“工作状态”。在左方指示器43l和右方指示器43r中的一方未闪烁的情况下,表现为该未闪烁的方向指示器的状态是“非工作状态”。
160.(构成-其他)
161.车速传感器44检测车速vs,向ecu21输出表示车速vs的信号。转向角度传感器45检测方向盘51的旋转角度即转向角度θs,向ecu21输出表示转向角度θs的信号。
162.在方向盘51处于中立位置时,转向角度θs成为“0”。转向角度θs在方向盘51被相对于中立位置顺时针旋转时成为正值(即θs>0)。另一方面,转向角度θs在方向盘51被相对于中立位置逆时针旋转时成为负值(即θs<0)。
163.显示器46是配置在车辆10的仪表面板(未图示)的、车辆10的驾驶员能够看到的位置的液晶显示器(lcd)。显示于显示器46的文字和图形等由ecu21控制。扬声器47配设在车辆10的车室内。由扬声器47再现的警告音和语音消息等由ecu21控制。
164.制动器踏板操作量传感器48对制动器踏板操作量bp进行检测,向ecu21输出表示制动器踏板操作量bp的信号,该制动器踏板操作量bp是驾驶员为了使车速vs降低而操作的制动器踏板52的操作量。在制动器踏板52未被操作时,制动器踏板操作量bp成为“0”。制动器踏板52的操作量越大,则制动器踏板操作量bp越大。
165.(对向车辆报知处理)
166.接着,假定为车辆10行驶在具有规定了车辆在道路的左侧通行的法规的地域(左侧通行地域,例如日本或者英国),对ecu21执行的“对向车辆报知处理”进行说明。在车辆10正在右转的情况下,当与“对向车辆”碰撞的可能性高时,ecu21执行对向车辆报知处理。具体而言,ecu21使车辆10的显示器46和扬声器47进行“用于对车辆10的驾驶员报知对向车辆的存在的动作(即报知动作)”。对向车辆是在对向车道上行驶的其他车辆,该对向车道是与
行驶车道对向的车道。对向车道可以称为在形成有行驶车道的道路中、所确定的车辆行进方向为与行驶车道中的车辆行进方向相反的方向的车道。
167.ecu21在“路径交叉报知条件”“第1先行报知条件”以及“第2先行报知条件”中的至少一个已成立时,开始对向车辆报知处理。为了便于说明,“路径交叉报知条件”“第1先行报知条件”以及“第2先行报知条件”各自也被称为“特定条件”。为了便于说明,左侧通行地域中的右方(即在车辆要转弯时会与直行对向车交叉的转弯方向)也被称为“特定方向”。在左侧通行地域中,右方为特定方向。在右侧通行地域中,左方为特定方向。
168.<<路径交叉报知条件>>
169.路径交叉报知条件是在以下的条件(a1)~条件(a4)全部已成立时成立的条件。
170.条件(a1):右方指示器43r处于工作状态(闪烁)。
171.条件(a2):存在对向车辆。
172.条件(a3):车辆10的“自身车辆预想路径”与对向车辆的“对向车辆预想路径”相互交叉。
173.条件(a4):交点到达时间tc为预定的第1阈值时间tth1以下(即tc≤tth1)。
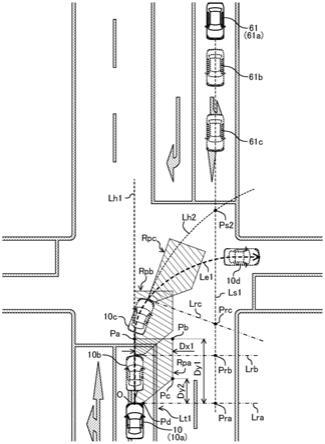
174.参照图3对条件(a1)~条件(a4)分别进行说明。在图3中,车辆10的当前位置由车辆位置10a表示。在本例中,驾驶员正要使车辆10在交叉路口进行右转。具体而言,驾驶员正要使车辆10从车辆位置10a经过车辆位置10b和车辆位置10c而到达车辆位置10d。虚线le1表示驾驶员所意图的车辆10的行驶路径(具体而言为车辆10的前端中央部的移动路径)。
175.此外,如后述那样,在车辆10到达车辆位置10d之前,通过对向车辆报知处理对车辆10的驾驶员报知其他车辆61的存在。因此,在车辆10位于车辆位置10c的附近的时间点,驾驶员使车辆10停止的可能性高。
176.在车辆10行驶在车辆位置10a~车辆位置10b的区间的期间中,转向角度θs为0
°
。在车辆10通过了车辆位置10b之后,转向角度θs开始增加,由此车辆10向右方转弯。然后,转向角度θs开始减少,在车辆10到达了车辆位置10d的时间点,转向角度θs返回0
°
。
177.驾驶员在车辆10到达了车辆位置10a时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10a时,条件(a1)成立。
178.图3所示的其他车辆61是基于前方图像检测到的其他车辆(即目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10a的时间点的其他车辆61的位置由其他车辆位置61a表示。车辆10处于车辆位置10b的时间点的其他车辆61的位置由其他车辆位置61b表示。车辆10处于车辆位置10c的时间点的其他车辆61的位置由其他车辆位置61c表示。
179.<<<判定为对向车辆的条件>>>
180.在本实施方式中,对向车辆是满足全部的以下条件(a)~条件(e)的摄像头检测目标物。即,若条件(a)~条件(e)全部成立,则条件(a2)成立。即,若条件(a)~条件(e)全部成立,则判定为存在对向车辆。
181.条件(a):存在摄像头检测目标物,且该目标物类别为“车辆”。
182.条件(b):该摄像头检测目标物的纵向位置dy为正值(即dy>0)。
183.条件(c):该摄像头检测目标物的纵向相对速度vy为负值(即vy<0)。
184.条件(d):该摄像头检测目标物的目标物行驶速度vc为预定的其他车辆阈值速度vcth以上(即vc≥vcth)。
185.条件(e):预想为该摄像头检测目标物会通过车辆10的当前位置的右方。
186.其他车辆61是目标物类别为“车辆”的摄像头检测目标物,因此,条件(a)成立。
187.如根据其他车辆位置61a~其他车辆位置61c可理解的那样,在车辆10行驶在车辆位置10a~车辆位置10c的区间中时,其他车辆61处于车辆10的前方。即,在车辆10行驶在该区间的期间,其他车辆61的纵向位置dy为正值,因此,条件(b)成立。
188.而且,在车辆10行驶在车辆位置10a~车辆位置10c的区间的期间,其他车辆61在车辆10的前后方向上接近车辆10。即,在车辆10行驶在该区间的期间,其他车辆61的纵向相对速度vy为负值,因此,条件(c)成立。
189.条件(d)所涉及的其他车辆阈值速度vcth被预先设定为与车辆在交叉路口直行的情况下的该车辆可取的一般的行驶速度中的下限值大致一致。其他车辆61正要在交叉路口直行,因此,该目标物行驶速度vc比其他车辆阈值速度vcth大。因此,条件(d)成立。
190.接着,对条件(e)进行说明。在该摄像头检测目标物的“对向车辆预想路径”与车辆10的“右方半直线”交叉的情况下,ecu21判定为条件(e)成立。对于对向车辆预想路径,基于摄像头检测目标物的位置(即横向位置dx和纵向位置dy)以及速度(即横向相对速度vx和纵向相对速度vy),根据其速度不变化而被维持这一假定来取得。
191.在图3中,处于其他车辆位置61a的其他车辆61的对向车辆预想路径由虚线ls1表示。在本例中,其他车辆61正在直行。因此,处于其他车辆位置61b的其他车辆61的对向车辆预想路径由图3中的虚线ls1的与其他车辆位置61b相比处于纸面下方的区间表示。同样,处于其他车辆位置61c的其他车辆61的对向车辆预想路径由图3中的虚线ls1的与其他车辆位置61c相比处于纸面下方的区间表示。
192.车辆10的右方半直线是从车辆10的前端中央部(即x-y坐标系的原点)在车辆10的车宽方向(即x轴方向)上向右方延伸的半直线。在图3中,处于车辆位置10a的车辆10的右方半直线由单点划线lra表示。处于车辆位置10b的车辆10的右方半直线由单点划线lrb表示。处于车辆位置10c的车辆10的右方半直线由单点划线lrc表示。
193.虚线ls1(即其他车辆61的对向车辆预想路径)和单点划线lra在点pra相互交叉。同样,虚线ls1和单点划线lrb在点prb相互交叉,虚线ls1和单点划线lrc在点prc相互交叉。因此,在车辆10行驶在车辆位置10a~车辆位置10c的期间,条件(e)成立。
194.因此,在车辆10行驶在车辆位置10a~车辆位置10c的区间的期间,其他车辆61满足全部的条件(a)~条件(e),因而,条件(a2)成立。
195.接着,对条件(a3)进行说明。自身车辆预想路径是车辆10的预想行驶路径,基于当前时间点的转向角度θs,根据该转向角度θs不变化而被维持这一假定来取得。在车辆10处于车辆位置10a的时间点,自身车辆预想路径由虚线lh1表示。如上所述,该时间点的转向角度θs为0
°
,因此,虚线lh1为直线。处于车辆位置10b的车辆10的自身车辆预想路径由图3中的虚线lh1的与车辆位置10b相比处于纸面上方的区间表示。
196.如根据图3可理解的那样,车辆10处于车辆位置10a的时间点的自身车辆预想路径(即虚线lh1)与其他车辆61(具体而言为处于其他车辆位置61a的其他车辆61)的对向车辆预想路径(即虚线ls1)不相互交叉。同样,车辆10处于车辆位置10b的时间点的自身车辆预想路径(即虚线lh1)与其他车辆61(具体而言为处于其他车辆位置61b的其他车辆61)的对向车辆预想路径(即虚线ls1)不相互交叉。因此,在车辆10行驶在车辆位置10a~车辆位置
10b的区间的期间,条件(a3)不成立。因此,在该期间,路径交叉报知条件不成立。
197.另一方面,车辆10到达了车辆位置10c的时间点的车辆10的自身车辆预想路径由虚线lh2表示。在该时间点,转向角度θs为正值(转向角度θs>0),因此,如根据虚线lh2可理解的那样,车辆10的预想行驶路径向右方弯曲。
198.虚线lh2与虚线ls1在点ps2相互交叉。因此,在车辆10处于车辆位置10c的时间点,条件(a3)成立。
199.进而,对条件(a4)进行说明。交点到达时间tc是到车辆10到达自身车辆预想路径与对向车辆预想路径的交点(在本例中为点ps2)为止的时间。ecu21通过将从车辆10到自身车辆预想路径与对向车辆预想路径的交点为止的距离(路程)除以车速vs来取得(算出)交点到达时间tc。在本例中,在车辆10到达了车辆位置10c的时间点,交点到达时间tc变为与第1阈值时间tth1相等。即,在车辆10到达了车辆位置10c的时间点,条件(a4)成立。
200.因此,在车辆10到达了车辆位置10c的时间点,条件(a1)~条件(a4)全部成立,从而路径交叉报知条件成立。
201.<<第1先行报知条件>>
202.第1先行报知条件是在上述的“条件(a1)以及条件(a2)”和以下的条件(b3a)全部已成立时成立的条件。即,第1先行报知条件在以下的全部条件已成立时成立。
203.条件(a1):右方指示器43r处于工作状态(闪烁)。
204.条件(a2):存在对向车辆。
205.条件(b3a):后述的“车辆10的右转通过区域”中不包含右方区划线。此外,为了便于说明,条件(b3a)也被称为“特定区域条件”。条件(b3a)是在预测(推定)为自身车辆开始向特定方向的转弯的可能性高的情况下成立的条件。
206.车辆10的“右转通过区域”是车辆10附近的右斜前方向的区域,更详细而言,是将车辆10的前端中央部(原点o)、点pa、点pb、点pc以及点pd作为顶点的5边形的区域。点pa、点pb、点pc以及点pd各自的x-y坐标值是pa(0,dy1)、pb(dx1,dy1)、pc(dx1,dy2)以及pd(wd/2,0)。右转通过区域是包含车辆10在右转(向特定方向转弯)的情况下所通过的区域的一部分、且针对车辆10预先确定的区域,为了便于说明,也被称为“特定区域”。
207.距离dx1、距离dy1以及距离dy2分别是被预先确定为使得右转通过区域成为“在车辆10进行右转的情况(即在车辆10向右方转弯的情况下)车辆10通过的可能性高的区域”的固定值。为了规定点pd所使用的车宽wd是车辆10的车宽方向上的长度(参照图1)。此外,dy1>dy2>0以及dx1>wd/2>0。
208.例如在车辆10处于车辆位置10a的情况下,右转通过区域由区域rpa表示。该区域rpa中包含作为右方区划线的区划线lt1。因此,在该时间点,条件(b3a)不成立。
209.车辆10处于车辆位置10b的情况下的右转通过区域由区域rpb表示,车辆10处于车辆位置10c的情况下的右转通过区域由区域rpc表示。这些“区域rpb和区域rpc”各自不包含区划线(右方区划线)lt1。即,在车辆10到达了车辆位置10b的时间点以后,右转通过区域中不包含区划线(右方区划线)lt1。由此,在车辆10到达了车辆位置10b的时间点以后,条件(b3a)成立。即在图3所示的例子中,在车辆10到达了车辆位置10b的时间点,条件(a1)、条件(a2)以及条件(b3a)成立,因而,第1先行报知条件成立。
210.这样,在作为路径交叉报知条件成立的时间点(车辆10到达了车辆位置10c的时间
点)之前的时间点的“车辆10到达了车辆位置10b的时间点”,第1先行报知条件成立。因此,在本例中,提前开始对向车辆报知处理。
211.<<第2先行报知条件>>
212.第2先行报知条件是在上述的“条件(a1)以及条件(a2)”和以下的“条件(b3b)以及条件(b4)”的全部条件已成立时成立的条件。即,第2先行报知条件在以下的全部条件已成立时成立。
213.条件(a1):右方指示器43r处于工作状态(闪烁)。
214.条件(a2):存在对向车辆。
215.条件(b3b):车辆10的右转通过区域中包含右方区划线。
216.条件(b4):车速vs比预定的第1阈值速度vth1小(即vs<vth1)。第1阈值速度vth1被预先设定为与在车辆开始右转(或者左转)的时间点该车辆可取的一般的行驶速度中的上限值(即将右左转之前上限值)大致一致。
217.此外,在条件(b3b)和条件(b4)均成立的情况下,为了便于说明,也被表现为“转弯待机条件”已成立。转弯待机条件是在预测(推定)为自身车辆开始向特定方向的转弯的可能性高的情况下成立的条件。
218.进而,参照图4对第2先行报知条件进行说明。在图4所示的例子中,车辆10的当前位置由车辆位置10e表示。在本例中,驾驶员正要使车辆10横穿对向车道、且进入停车位置rs。具体而言,驾驶员正要使车辆10从车辆位置10e经过车辆位置10f~车辆位置10h而到达车辆位置10i。虚线le2表示驾驶员所意图的车辆10的行驶路径。依次对该情况下的路径交叉报知条件、第1先行报知条件以及第2先行报知条件各自是否成立进行说明。
219.驾驶员在车辆10到达了车辆位置10f时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10f时,条件(a1)成立。
220.图4所示的其他车辆62是基于前方图像检测到的其他车辆(即目标物类别为“车辆”的摄像头检测目标物)。因此,其他车辆62满足上述的条件(a)。
221.车辆10处于车辆位置10e的时间点的其他车辆62的位置由其他车辆位置62e表示。车辆10处于车辆位置10f的时间点的其他车辆62的位置由其他车辆位置62f表示。车辆10处于车辆位置10g的时间点的其他车辆62的位置由其他车辆位置62g表示。
222.处于其他车辆位置62e的其他车辆62的对向车辆预想路径由虚线ls2表示。在本例中,其他车辆62的目标物行驶速度vc比其他车辆阈值速度vcth大。因此,其他车辆62满足条件(b)。
223.在本例中,其他车辆62正在直行。因此,处于其他车辆位置62f的其他车辆62的对向车辆预想路径由图4中的虚线ls2的与其他车辆位置62f相比处于纸面下方的区间表示。处于其他车辆位置62g的其他车辆62的对向车辆预想路径由图4中的虚线ls2的与其他车辆位置62g相比处于纸面下方的区间表示。
224.如根据图4可理解的那样,在车辆10行驶在车辆位置10e~车辆位置10g的期间,其他车辆62的纵向位置dy为正值,纵向相对速度vy为负值(即dy>0且vy<0)。因此,在该期间,其他车辆62满足条件(b)和条件(c)。
225.处于车辆位置10e的车辆10的右方半直线由单点划线lre表示。处于车辆位置10f的车辆10的右方半直线由单点划线lrf表示。处于车辆位置10g的车辆10的右方半直线由单
点划线lrg表示。
226.虚线ls2(即其他车辆62的对向车辆预想路径)和单点划线lre在点pre相互交叉。同样,虚线ls2和单点划线lrf在点prf相互交叉,虚线ls2和单点划线lrg在点prg相互交叉。因此,在车辆10行驶在车辆位置10e~车辆位置10g的期间,条件(e)成立。
227.因此,在车辆10行驶在车辆位置10e~车辆位置10g的区间的期间,其他车辆62满足全部的条件(a)~条件(e),因此,条件(a2)成立。即,其他车辆62被判定为是对向车辆。
228.车辆10处于车辆位置10f的时间点的自身车辆预想路径由虚线lh3表示。虚线ls2(即其他车辆62的对向车辆预想路径)与虚线lh3不相互交叉。即,在该时间点,条件(a3)不成立。
229.然后,车辆10处于车辆位置10g的时间点的自身车辆预想路径由虚线lh4表示。虚线ls2与虚线lh4在点ps4相互交叉。因此,在该时间点,条件(a3)成立。
230.而且,车辆10处于车辆位置10g的时间点的交点到达时间tc与第1阈值时间tth1相等。因此,即在车辆10到达了车辆位置10g的时间点,条件(a4)成立。
231.因此,在车辆10到达了车辆位置10g的时间点,条件(a1)~条件(a4)全部成立,从而路径交叉报知条件成立。
232.接着,对第1先行报知条件是否成立进行说明。处于车辆位置10e的车辆10的右转通过区域由区域rpe表示。同样,处于车辆位置10f的车辆10的右转通过区域由区域rpf表示。处于车辆位置10g的车辆10的右转通过区域由区域rpg表示。
233.如根据图4可理解的那样,区域rpe、区域rpf以及区域rpg中分别包含作为右方区划线的区划线lt2。因此,在车辆10行驶在车辆位置10e~车辆位置10g的区间的期间,条件(b3a)不成立。因此,在该期间,第1先行报知条件不成立。
234.进而,对第2先行报知条件是否成立进行说明。如上所述,区域rpe、区域rpf以及区域rpg中分别包含作为右方区划线的区划线lt2。由此,在车辆10行驶在车辆位置10e~车辆位置10g的区间的期间,条件(b3b)成立。
235.如前述那样,第1阈值速度vth1被设定为即将右左转之前上限值,且车辆10的驾驶员具有进行右转的意图,因此,在车辆10行驶在车辆位置10e~车辆位置10g的区间的期间,车速vs比第1阈值速度vth1小。因此,在该期间,条件(b4)成立。
236.如上所述,驾驶员在车辆10到达了车辆位置10f时使右方指示器43r工作,因此,在该时间点,条件(a1)成立。因此,在车辆10到达了车辆位置10f时,第2先行报知条件成立。
237.这样,在作为路径交叉报知条件成立的时间点(车辆10到达了车辆位置10g的时间点)之前的时间点的“车辆10到达了车辆位置10f的时间点”,第2先行报知条件成立。因此,在本例中,提前开始对向车辆报知处理。
238.接着,参照图5对第2先行报知条件包括条件(b4)的理由进行说明。在图5中,车辆10的当前位置由车辆位置10j表示。驾驶员正要使车辆10从行驶车道向“在车辆10的右方与行驶车道相邻的车道(所确定的车辆行进方向与行驶车道中的车辆行进方向相同的车道,一般也被称为
‘
超车车道’或者
‘
相邻车道’。)”进行车道变更。具体而言,驾驶员正要使车辆10从车辆位置10j经过车辆位置10k到达车辆位置10m。虚线le3表示驾驶员所意图的车辆10的行驶路径。
239.驾驶员在车辆10到达了车辆位置10k时使右方指示器43r的工作开始。因此,在车
辆10到达了车辆位置10k时,条件(a1)成立。此外,驾驶员在车辆10到达了车辆位置10m时(即车道变更已结束时)使右方指示器43r的工作结束。
240.图5所示的其他车辆63是基于前方图像检测到的其他车辆(即目标物类别为“车辆”的摄像头检测目标物)。
241.车辆10处于车辆位置10j的时间点的其他车辆63的位置由其他车辆位置63j表示。车辆10处于车辆位置10k的时间点的其他车辆63的位置由其他车辆位置63k表示。车辆10处于车辆位置10m的时间点的其他车辆63的位置由其他车辆位置63m表示。
242.省略详细描述,但在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,其他车辆63满足对向车辆的要件(即条件(a)~(e))。因此,条件(a2)成立。另一方面,在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,条件(a3)和条件(a4)均不成立。即,在该期间,路径交叉报知条件不成立。
243.处于车辆位置10j的车辆10的右转通过区域由区域rpj表示。同样,处于车辆位置10k的车辆10的右转通过区域由区域rpk表示。处于车辆位置10m的车辆10的右转通过区域由区域rpm表示。
244.处于车辆位置10j的车辆10的行驶车道的右方区划线为区划线lt3。相邻车道的右方区划线为区划线lt4。如根据图5可理解的那样,区域rpj和区域rpk中分别包含区划线lt3。而且,区域rpm中包含区划线lt4。因此,在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,条件(b3a)不成立。即,在该期间,第1先行报知条件不成立。
245.另一方面,在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,条件(b3b)成立。而且,在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,车速vs比第1阈值速度vth1大。因此,在该期间,条件(b4)不成立。即在如图5所示那样车辆10进行车道变更的情况下,车速vs比如图4所示那样车辆10进行右转的情况下的车速vs大的可能性高。在该情况下,车速vs比第1阈值速度vth1大,因此,条件(b4)不成立。即,在该期间,第2先行报知条件不成立。
246.因此,在车辆10行驶在车辆位置10j~车辆位置10m的区间的期间,路径交叉报知条件、第1先行报知条件以及第2先行报知条件均不成立,因此,不执行对向车辆报知处理。换言之,例如即使是在进行车道变更时右方指示器43r工作、且存在对向车的情况下(即,即使条件(a1)、(a2)以及(b3b)成立),若驾驶员没有为了使车辆10右转而使车速vs降低,则条件(b4)也不成立。由此,在车道变更时,第2先行报知条件不成立,从而不执行对向车辆报知处理。
247.(具体工作)
248.接着,对ecu21的具体工作进行说明。ecu21的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图6中由流程图表示的“对向车辆报知判定处理例程”。
249.因此,当成为适当的定时时,cpu从图6的步骤600开始处理,进入步骤605,判定当前时间点的状态是否为未执行对向车辆报知处理(以下也简称为“报知处理”。)的状态。即,cpu判定在当前时间点是否未进行用于对驾驶员报知对向车的存在的“使用了显示器46和扬声器47的报知动作”。
250.(情形a)
251.假定为,在成为了未执行报知处理、且路径交叉报知条件成立的状况之后,首次执
行本例程。
252.根据该假定,在当前时间点未执行报知处理,因此,cpu在步骤605中判定为“是”而进入步骤610,判定右方指示器43r是否处于工作状态(是否处于工作中)。即,cpu判定上述的条件(a1)是否成立。
253.根据前述假定,右方指示器43r处于工作中。因此,cpu在步骤610中判定为“是”而进入步骤615,判定是否存在对向车辆。即,cpu判定条件(a2)是否成立。
254.根据前述假定,存在对向车辆。因此,cpu在步骤615中判定为“是”而进入步骤620,判定自身车辆预想路径与对向车辆预想路径是否相互交叉。即,cpu判定条件(a3)是否成立。
255.根据前述假定,自身车辆预想路径与对向车辆预想路径相互交叉。因此,cpu在步骤620中判定为“是”而进入步骤625,判定交点到达时间tc是否为第1阈值时间tth1以下。即,cpu判定条件(a4)是否成立。
256.根据前述假定,交点到达时间tc为第1阈值时间tth1以下。因此,cpu在步骤625中判定为“是”而进入步骤630,开始报知处理。
257.具体而言,cpu使表示车辆10与对向车辆碰撞的可能性高的记号(对向车辆警告记号)显示于显示器46。而且,cpu使扬声器47产生表示与对向车辆碰撞的可能性高的警告音(对向车辆警告音)。接着,cpu进入步骤695,结束本例程的处理。
258.(情形b)
259.假定为,在成为了未执行报知处理、且第1先行报知条件已成立的状况之后,首次执行本例程。例如,在图3所示的例子中,在车辆10到达了车辆位置10b之后首次执行本例程的情况符合该假定。
260.在该情况下,条件(a1)和条件(a2)均成立,因此,cpu在步骤610和步骤615中分别判定为“是”,进入步骤620。根据前述的假定,路径交叉报知条件未成立(即条件(a3)未成立)。因此,cpu在步骤620中判定为“否”而进入步骤645,判定当前的状态是否处于“右转通过区域中不包含右方区划线的状态”。即,cpu判定条件(b3a)是否成立(换言之,是否处于条件(b3b)不成立的状态)。
261.根据前述假定,第1先行报知条件成立(即条件(b3a)成立),因此,cpu在步骤645中判定为“是”而进入步骤630,开始报知处理。
262.(情形c)
263.假定为,在成为了未执行报知处理、且第2先行报知条件已成立的状况之后,首次执行本例程。例如在图4所示的例子中,在车辆10到达了车辆位置10f之后首次执行本例程的情况符合该假定。
264.在该情况下,条件(a1)和条件(a2)均成立,另一方面,条件(a3)和条件(b3a)均不成立。因此,cpu在步骤610和步骤615中分别判定为“是”之后,在步骤620和步骤645中分别判定为“否”而进入步骤650。
265.在步骤650中,cpu判定车速vs是否比第1阈值速度vth1小。即,cpu判定条件(b4)是否成立。根据前述的假定,车速vs比第1阈值速度vth1小,因此,cpu在步骤650中判定为“是”而进入步骤630,开始报知处理。
266.(情形d)
267.接着,假定为,正在执行报知处理,且“报知结束条件”不成立。报知结束条件是在应该结束报知处理的情况下成立的条件,在后面进行描述。
268.在该情况下,已经正在执行报知处理,因此,cpu在步骤605中判定为“否”而进入步骤635,判定报知结束条件是否成立。根据前述的假定,报知结束条件不成立,因此,cpu在步骤635中判定为“否”而直接进入步骤695。即,在开始了报知处理之后,在到报知结束条件成立为止的期间持续进行报知处理。
269.(情形e)
270.假定为,在正在执行报知处理、且报知结束条件已成立之后,首次执行本例程。
271.<<报知结束条件>>
272.本实施方式中的报知结束条件是在以下的条件(c1)~条件(c3)中的至少一个已成立时成立的条件。
273.条件(c1):右方指示器43r的工作已结束(右方指示器43r的状态从工作状态变化为了非工作状态)。
274.条件(c2):变为了不存在对向车辆。
275.条件(c3):车辆10已停止(车速vs变化为了“0”。)。
276.例如,当其他车辆(即对向车辆)减速而目标物行驶速度vc变为比其他车辆阈值速度vcth小时,条件(d)变为不成立,因此,该其他车辆变为不是对向车辆。在该情况下,条件(c2)成立,因此,报知结束条件成立。而且,当注意到了对向车辆的存在的驾驶员使车辆10停止时(即当车速vs成为“0”时),条件(c3)成立,因此,报知结束条件成立。
277.根据前述假定,报知结束条件成立,因此,cpu在步骤635中判定为“是”而进入步骤640,结束报知处理。具体而言,cpu结束显示器46中的上述的对向车辆警告记号的显示。而且,cpu使扬声器47的对向车辆警告音的产生结束。接着,cpu直接进入步骤695。
278.(其他情形)
279.在未执行报知处理、且条件(a1)不成立的情况下,cpu在步骤610中判定为“否”而直接进入步骤695。
280.在未执行报知处理、且条件(a1)成立、但条件(a2)不成立的情况下,cpu在步骤615中判定为“否”而直接进入步骤695。
281.在未执行报知处理、且条件(a1)~条件(a3)成立、但条件(a4)不成立的情况下,cpu在步骤625中判定为“否”而直接进入步骤695。
282.在未执行报知处理、条件(a1)、条件(a2)以及(b3b)成立、但条件(b4)未成立的情况下,cpu在步骤650中判定为“否”而直接进入步骤695。
283.以上,如所说明那样,即使基于车辆10的转向角度θs取得的自身车辆预想路径与对向车辆的对向车辆预想路径不相互交叉(即,即使路径交叉报知条件不成立),搭载有ecu21的本报知装置在第1先行报知条件或者第2先行报知条件已成立的定时也执行对向车辆报知处理。即,根据本报知装置,能够提前开始对向车辆报知处理。而且,如由图5的例子所示那样,在车辆10向右方进行车道变更的情况下(即在车辆10未要右转的情况下),不执行对向车辆报知处理。即,对向车辆报知处理不会不必要地工作。
284.(本报知装置的第1变形例)
285.接着,对本报知装置的第1变形例(第1变形装置)进行说明。上述的本报知装置在
路径交叉报知条件、第1先行报知条件以及第2先行报知条件中的至少一个已成立的情况下执行对向车辆报知处理。与此相对,第1变形装置在路径交叉报知条件和“第3先行报知条件”中的至少一个已成立的情况下执行对向车辆报知处理。第3先行报知条件是基于“前行车辆”的状态来判定是否成立的条件,“前行车辆”是行驶在紧邻车辆10之前的位置的其他车辆。以下,对该不同点进行说明。
286.<<第3先行报知条件>>
287.第3先行报知条件是在上述的条件(a1)以及条件(a2)和以下的条件(d3)全部已成立时成立的条件。即,第3先行报知条件在以下的全部条件已成立时成立。
288.条件(a1):右方指示器43r处于工作状态(闪烁)。
289.条件(a2):存在对向车辆。
290.条件(d3):前行车辆的目标物行驶速度vc比预定的第2阈值速度vth2大(即vc>vth2)。第2阈值速度vth2被预先设定为与车辆右转的情况下的一般的行驶速度的范围的下限值大致一致。为了便于说明,第2阈值速度vth2也被称为前行车辆转弯阈值速度。在前行车辆的目标物行驶速度vc从第2阈值速度vth2以下的值变为了比第2阈值速度vth2大时,能够判定为前行车辆开始了右转(向特定方向的转弯)。条件(d3)是在预测(推定)为自身车辆开始向特定方向的转弯的可能性高的情况下成立的条件。
291.参照图7对第3先行报知条件进行说明。在图7中,车辆10的当前位置由车辆位置10n表示。在本例中,驾驶员正要使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10n经过车辆位置10o而到达车辆位置10p。虚线le4表示驾驶员所意图的车辆10的行驶路径。
292.车辆10处于车辆位置10n的时间点的自身车辆预想路径由虚线lh5表示。车辆10处于车辆位置10o的时间点的自身车辆预想路径由图7中的虚线lh5的与车辆位置10о相比处于纸面上方的区间表示。
293.图7所示的其他车辆64是基于前方图像检测到的其他车辆(即目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10n的时间点的其他车辆64的位置由其他车辆位置64n表示。车辆10处于车辆位置10o的时间点的其他车辆62的位置由其他车辆位置64o表示。
294.驾驶员在车辆10到达了车辆位置10o时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10o时,条件(a1)成立。
295.省略详细描述,但至少在“车辆10行驶在车辆位置10n~车辆位置10o的区间的期间”,其他车辆64满足对向车辆的要件,因此,条件(a2)成立。另一方面,条件(a3)和条件(a4)在车辆10通过了车辆位置10o之后成立。换言之,在车辆10到达了车辆位置10o的时间点,条件(a3)和条件(a4)均不成立。在本例中,在车辆10到达了车辆位置10o之后的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
296.图7所示的其他车辆65是基于前方图像检测到的摄像头检测目标物。车辆10处于车辆位置10n的时间点的其他车辆65的位置由其他车辆位置65n表示。车辆10处于车辆位置10o的时间点的其他车辆65的位置由其他车辆位置65o表示。
297.第1变形装置的车辆控制ecu22(以下也简称为“ecu22”。)在车辆10行驶在车辆位置10n~车辆位置10o的区间的期间判定为其他车辆65是前行车辆。
298.<<<判定为前行车辆的条件>>>
299.更具体地描述,前行车辆是满足全部的上述的条件(a)以及条件(b)和以下的条件(f)以及条件(g)的摄像头检测目标物。即,若条件(a)、条件(b)、条件(f)以及条件(g)全部成立,则判定为存在前行车辆。
300.条件(a):存在摄像头检测目标物,且该目标物类别为“车辆”。
301.条件(b):该摄像头检测目标物的纵向位置dy为正值(即dy>0)。
302.条件(f):该摄像头检测目标物的纵向位置dy比预定距离dy3小(即dy<dy3)。
303.条件(g):该摄像头检测目标物的左端位置处于自身车辆预想路径的左方,且右端位置处于自身车辆预想路径的右方。
304.其他车辆65是目标物类别为“车辆”的摄像头检测目标物,因此,条件(a)成立。在车辆10行驶在车辆位置10n~车辆位置10o的区间的期间,其他车辆65相对于车辆10处于前方,因此,纵向位置dy为正值。因此,在该期间,条件(b)成立。
305.如根据图7可理解的那样,车辆10处于车辆位置10n的时间点的其他车辆65的纵向位置dy为距离da,距离da比距离dy3小(即da<dy3)。因此,条件(f)成立。
306.在该时间点,其他车辆65的左端位置为点pe,右端位置为点pf。点pe(即左端位置)处于虚线lh5(即自身车辆预想路径)的左方,点pf(即右端位置)处于虚线lh5的右方。因此,条件(g)成立。
307.在本例中,在车辆10行驶在车辆位置10n~车辆位置10o的区间的期间,条件(f)和条件(g)均成立。即,在车辆10行驶在车辆位置10n~车辆位置10o的区间的期间,条件(a)、条件(b)、条件(f)以及条件(g)全部成立。因此,在该期间,其他车辆65满足前行车辆的要件。
308.而且,在本例中,车辆10行驶在车辆位置10n~车辆位置10o的区间的期间的其他车辆65(即前行车辆)的目标物行驶速度vc比第2阈值速度vth2大。即,在车辆10行驶在车辆位置10n~车辆位置10o的区间的期间,条件(d3)成立。
309.例如,在其他车辆65的驾驶员未注意到对向车(在本例中为其他车辆64)的存在而要在交叉路口右转的情况下,其他车辆65的目标物行驶速度vc可能比第2阈值速度vth2大。或者,在其他车辆65的驾驶员在其他车辆64到达交叉路口之前而要使其他车辆65右转的情况下,其他车辆65的目标物行驶速度vc可能比第2阈值速度vth2大。在这些情况下,车辆10的驾驶员有可能认为不存在对向车而要跟在其他车辆65之后开始车辆10的右转。为了避免发生这样的事态,当在条件(a1)和条件(a2)的基础上而条件(d3)成立时,执行对向车辆报知处理。
310.因此,当在车辆10到达了车辆位置10o的时间点、通过驾驶员的操作而右方指示器43r开始工作时,条件(a1)成立,从而第3先行报知条件(与路径交叉报知条件成立相比先)成立。即,在车辆10到达了车辆位置10o的时间点,开始对向车辆报知处理。
311.(第1变形装置的具体工作)
312.第1变形装置的ecu22的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图8中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。此外,对在以下记述的流程图各自所示的、执行与图6的流程图所示的步骤同样的处理的步骤,赋予与图6相同的步骤标号。
313.因此,当成为适当的定时时,cpu从图8的步骤800开始处理,执行步骤605以后的步骤的处理。cpu在步骤620中判定为了“否”的情况下(即,在条件(a1)和条件(a2)成立、而条件(a3)不成立的情况下),进入步骤820。
314.在步骤820中,cpu判定是否存在前行车辆,在存在前行车辆的情况下,判定该前行车辆的目标物行驶速度vc是否比第2阈值速度(前行车辆转弯阈值速度)vth2大。即,cpu判定条件(d3)是否成立。
315.若前行车辆的目标物行驶速度vc比第2阈值速度vth2大(即若条件(d3)成立),则cpu在步骤820中判定为“是”而进入步骤630,开始报知处理。即,在该情况下,第3先行报知条件成立。接着,cpu进入步骤895,结束本例程的处理。
316.另一方面,若前行车辆的目标物行驶速度vc为第2阈值速度vth2以下(即若条件(a1)和条件(a2)均成立、但条件(d3)不成立),则cpu在步骤820中判定为“否”而直接进入步骤895。此外,在不存在前行车辆的情况下,cpu也在步骤820中判定为“否”而直接进入步骤895。
317.以上,如所说明那样,第1变形装置基于前行车辆判定是否应该执行对向车辆报知处理。由此,即使路径交叉报知条件不成立,第1变形装置也能够在第3先行报知条件已成立的定时执行对向车辆报知处理。因此,根据第1变形装置,能够提前开始对向车辆报知处理,且对向车辆报知处理不会不必要地工作。此外,也可以构成为,ecu22的cpu31基于前方图像(的历史记录)判定是否“前行车辆开始了右转(向特定方向的转弯)”,在判定为了前行车辆开始了右转的情况下,判定为条件(d3)已成立。
318.(本报知装置的第2变形例)
319.接着,对本报知装置的第2变形例(第2变形装置)进行说明。上述的第1变形装置在路径交叉报知条件和第3先行报知条件中的至少一个已成立的情况下执行对向车辆报知处理。与此相对,第2变形装置在路径交叉报知条件和“第4先行报知条件”中的至少一个已成立的情况下执行对向车辆报知处理。以下,对该不同点进行说明。
320.<<第4先行报知条件>>
321.第4先行报知条件是在条件(a1)以及条件(a2)和以下的条件(e3)全部已成立时成立的条件。前行车辆是满足全部的上述的条件(a)、条件(b)、条件(f)以及条件(g)的摄像头检测目标物。
322.条件(a1):右方指示器43r处于工作状态(闪烁)。
323.条件(a2):存在对向车辆。
324.条件(e3):判定为了前行车辆的其他车辆开始了向右方的转弯(即右转)。条件(e3)是在预测(推定)为自身车辆开始向特定方向的转弯的可能性高的情况下成立的条件。
325.接着,参照图9对第4先行报知条件进行说明。在图9中,车辆10的当前位置由车辆位置10r表示。在本例中,驾驶员正要使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10r经过车辆位置10s而到达车辆位置10t。虚线le5表示驾驶员所意图的车辆10的行驶路径。
326.车辆10处于车辆位置10r的时间点的自身车辆预想路径由虚线lh6表示。车辆10处于车辆位置10s的时间点的自身车辆预想路径由图9中的虚线lh6的与车辆位置10s相比处于纸面上方的区间表示。
327.图9所示的其他车辆66是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10r的时间点的其他车辆66的位置由其他车辆位置66r表示。车辆10处于车辆位置10s的时间点的其他车辆66的位置由其他车辆位置66s表示。
328.驾驶员在车辆10到达了车辆位置10r时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10r时,条件(a1)成立。
329.省略详细描述,但至少在“车辆10行驶在车辆位置10r~车辆位置10s的区间的期间”,其他车辆66满足对向车辆的要件,因而,条件(a2)成立。另一方面,条件(a3)和条件(a4)在车辆10通过了车辆位置10s之后成立。换言之,在车辆10到达了车辆位置10s的时间点,条件(a3)和条件(a4)均不成立。在本例中,在车辆10到达了车辆位置10s之后的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
330.接着,以图9所示的其他车辆67为例对条件(e3)进行说明。其他车辆(即前行车辆)67的驾驶员有可能未注意到其他车辆66(即对向车辆)的存在而在交叉路口进行右转。或者,其他车辆67的驾驶员有可能要与其他车辆66到达交叉路口相比先进行交叉路口的右转。在这样的情况下,车辆10的驾驶员有可能误解为不存在对向车辆(即其他车辆66)。于是,在条件(a1)和条件(a2)成立时,当条件(e3)成立时(即当前行车辆开始右转时),执行对向车辆报知处理。
331.其他车辆67是基于前方图像检测到的摄像头检测目标物。车辆10处于车辆位置10r的时间点的其他车辆67的位置由其他车辆位置67r表示。车辆10处于车辆位置10s的时间点的其他车辆67的位置由其他车辆位置67s表示。
332.省略详细描述,但在车辆10行驶在车辆位置10r~车辆位置10s的区间的期间,其他车辆67满足条件(a)、条件(b)以及条件(f)。
333.处于其他车辆位置67r的其他车辆67的左端位置由点pg表示,右端位置由点ph表示。处于其他车辆位置67s的其他车辆67的左端位置由点pi表示,右端位置由点pj表示。
334.如根据图9可理解的那样,作为其他车辆位置67r的左端位置的点pg相比于虚线lh6(即,处于车辆位置10r的车辆10的自身车辆预想路径)处于左方,作为其他车辆位置67r的右端位置的点ph相比于虚线lh6处于右方。因此,在车辆10处于车辆位置10r时,条件(g)成立,因此,在该时间点判定为其他车辆67是前行车辆。
335.另一方面,作为其他车辆位置67s的左端位置的点pi和作为其他车辆位置67s的右端位置的点pj均相比于虚线lh6(即,处于车辆位置10s的车辆10的自身车辆预想路径)处于右方。更具体而言,其他车辆位置67s表示左端位置刚从虚线lh6的左方转变为右方之后的其他车辆67的位置。即,在车辆10到达了车辆位置10s的时间点,前行车辆(其他车辆67)相比于自身车辆预想路径(虚线lh6)而相对于车辆10向右方进行移动。换言之,在该时间点判定为了前行车辆的其他车辆开始向右方的转弯。因此,在该时间点,条件(e3)成立。
336.因此,在车辆10到达了车辆位置10s的时间点,在条件(a1)和条件(a2)的基础上而条件(e3)新成立,从而第4先行报知条件(与路径交叉报知条件成立相比先)成立。
337.(第2变形装置的具体工作)
338.第2变形装置的车辆控制ecu23(以下也简称为“ecu23”。)的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图10中由流程图表示的“对向车辆报知判定处理例程”来
代替图6所示的“对向车辆报知判定处理例程”。
339.因此,当成为适当的定时时,cpu从图10的步骤1000开始处理,执行步骤605以后的步骤的处理。cpu在步骤620中判定为了“否”的情况下(即,在条件(a1)和条件(a2)成立、而条件(a3)不成立的情况下),进入步骤1020。
340.在步骤1020中,cpu判定直到该时间点的不久之前是否存在过前行车辆,在存在过前行车辆的情况下判定为了该前行车辆的其他车辆开始了向右方的转弯之后,判定是否首次执行本例程。即,cpu在条件(e3)已成立之后,判定是否首次执行本例程。
341.若条件e3成立,则cpu在步骤1020中判定为“是”而进入步骤630,开始报知处理。即,在该情况下,第4先行报知条件成立。接着,cpu进入步骤1095,结束本例程的处理。
342.另一方面,若前行车辆未开始向右方的转弯(若条件e3未成立),则cpu在步骤1020中判定为“否”而直接进入步骤1095。
343.以上,如所说明那样,第2变形装置基于前行车辆判定是否应该执行对向车辆报知处理。由此,即使路径交叉报知条件不成立,第2变形装置也能够在第4先行报知条件已成立的定时执行对向车辆报知处理。因此,根据第2变形装置,能够提前开始对向车辆报知处理,且对向车辆报知处理不会不必要地工作。
344.(本报知装置的第3变形例)
345.本报知装置的第3变形例(第3变形装置)在路径交叉报知条件、“第5先行报知条件”、“第6先行报知条件”中的至少一个已成立的情况下,执行对向车辆报知处理。
346.<<第5先行报知条件>>
347.第5先行报知条件是在上述的条件(a1)以及条件(a2)和以下的条件(f3)全部已成立时成立的条件。即,第5先行报知条件在以下的全部条件已成立时成立。
348.条件(a1):右方指示器43r处于工作状态(闪烁)。
349.条件(a2):存在对向车辆。
350.条件(f3):对向车辆行驶在右方相邻车道上。即,对向车辆所行驶的对向车道与车辆10的行驶车道相互相邻。条件(f3)是在自身车辆开始向特定方向的转弯之前、自身车辆的驾驶员应该识别到对向车辆的存在的情况下成立的条件。
351.<<第6先行报知条件>>
352.第6先行报知条件是在上述的条件(a1)以及条件(a2)和以下的条件(f4)全部已成立时成立的条件。即,第6先行报知条件在以下的全部条件已成立时成立。
353.条件(a1):右方指示器43r处于工作状态(闪烁)。
354.条件(a2):存在对向车辆。
355.条件(f4):对向车辆的横向位置dx的大小(横向距离|dx|)比预定的第1阈值距离dth1小(即横向距离|dx|<dth1)。第1阈值距离dth1被设定为比多数情况下的行驶车道的宽度大些许长度的值。条件(f4)是在自身车辆开始向特定方向的转弯之前、自身车辆的驾驶员应该识别到对向车辆的存在的情况下成立的条件。
356.参照图11对第5先行报知条件和第6先行报知条件进行具体说明。在图11中,车辆10的当前位置由车辆位置10u表示。在本例中,驾驶员正要进行向在右方(右侧)相邻的车道的车道变更,然后使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10u经过车辆位置10v~车辆位置10x而到达车辆位置10y。虚线le6表示驾驶员所意图的车
辆10的行驶路径。
357.图11所示的其他车辆68是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10u的时间点的其他车辆68的位置由其他车辆位置68u表示。车辆10处于车辆位置10v的时间点的其他车辆68的位置由其他车辆位置68v表示。车辆10处于车辆位置10w的时间点的其他车辆68的位置由其他车辆位置68w表示。车辆10处于车辆位置10x的时间点的其他车辆68的位置由其他车辆位置68x表示。
358.处于其他车辆位置68u的其他车辆68的对向车辆预想路径由虚线ls3表示。在本例中,其他车辆68正在直行。
359.驾驶员在车辆10到达了车辆位置10u时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10u时,条件(a1)成立。
360.省略详细描述,但至少在“车辆10行驶在车辆位置10u~车辆位置10x的区间的期间”,其他车辆68满足对向车辆的要件(上述的条件(a)~条件(e))。由此,条件(a2)成立。而且,在车辆10到达了车辆位置10x之后的时间点,条件(a3)和条件(a4)均成立,其结果,路径交叉报知条件成立。
361.接着,对第5先行报知条件是否成立进行说明。第3变形装置的ecu24在判定为了条件(a2)成立(即存在对向车辆)、且不存在后述的中间车道时,判定为条件(f3)成立。即,ecu24在判定为了存在对向车辆、且不存在中间车道时,判定为对向车辆行驶在右方相邻车道上。
362.中间车道是位于对向车辆所行驶的对向车道与车辆10的行驶车道之间的其他车道。ecu24在以下的条件(x1)和条件(x2)均成立时,判定为存在中间车道。
363.条件(x1):右方区划线和相邻右方区划线均被检测到。
364.条件(x2):对向车辆预想路径(在本例中为虚线ls3)相对于车辆10位于比相邻右方区划线靠右方的位置。
365.具体而言,在车辆10处于车辆位置10u时,区划线lm1作为右方区划线被检测到,且区划线lm2作为相邻右方区划线被检测到,存在由区划线lm1和区划线lm2划定的中间车道。在该情况下,对向车辆预想路径(虚线ls3)相对于车辆10处于比相邻右方区划线(区划线lm2)靠右方的位置。由此,条件(x1)和条件(x2)成立,因此,ecu24判定为存在中间车道,因此,在该时间点判定为条件(f3)不成立。
366.然后,当车辆10到达车辆位置10v时,区划线lm2作为右方区划线被检测到,且区划线lm3作为相邻右方区划线被检测到。虚线ls3(即对向车辆预想路径)相对于车辆10处于比区划线lm3靠左方的位置。因此,在该情况下,不存在中间车道(即,其他车辆68行驶在右方相邻车道上),因此,条件(f3)成立,从而第5先行报知条件成立。
367.接着,对第6先行报知条件是否成立进行说明。在车辆10处于车辆位置10u时,处于其他车辆位置68u的其他车辆68的横向位置dx的大小|dx|比第1阈值距离dth1大。因此,在该时间点,条件(f4)不成立。
368.然后,在车辆10正在从行驶车道向与车辆10的右方相邻的车道(即由区划线lm1和区划线lm2划定的车道)进行车道变更时,其他车辆68的横向位置dx的大小|dx|减少。并且,当车辆10到达车辆位置10w时,其他车辆68的横向位置dx的大小|dx|变为比第1阈值距离dth1小。因此,在车辆10到达了车辆位置10w时,条件(f4)成立,因此,第6先行报知条件成
立。
369.(第3变形装置的具体工作)
370.第3变形装置的ecu24的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图12中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。
371.因此,当成为适当的定时时,cpu从图12的步骤1200开始处理,执行步骤605以后的步骤的处理。cpu在步骤620中判定为了“否”的情况下(即,在条件(a1)和条件(a2)成立、而条件(a3)不成立的情况下),进入步骤1245。
372.在步骤1245中,cpu判定对向车辆是否行驶在右方相邻车道上。即,cpu判定条件(f3)是否成立。
373.若对向车辆行驶在右方相邻车道上(即,若条件(f3)成立),则cpu在步骤1245中判定为“是”而进入步骤630,开始报知处理。
374.另一方面,若对向车辆未行驶在右方相邻车道上(即,若条件(f3)不成立),则cpu在步骤1245中判定为“否”而进入步骤1250。在步骤1250中,cpu判定作为对向车辆的横向位置dx的大小的横向距离|dx|是否比第1阈值距离dth1小。即,cpu判定条件(f4)是否成立。
375.若对向车辆的横向位置dx的大小|dx|比第1阈值距离dth1小(即,若条件(f4)成立),则cpu在步骤1250中判定为“是”而进入步骤630。另一方面,若对向车辆的横向位置dx的大小|dx|为第1阈值距离dth1以上(即,若条件(f4)不成立),则cpu在步骤1250中判定为“否”而直接进入步骤1295,结束本例程的处理。
376.以上,如所说明那样,第3变形装置能够在对向车辆行驶在右方相邻车道上的情况下开始对向车辆报知处理。即,能够在合适的定时执行对向车辆报知处理。
377.(本报知装置的第4变形例)
378.接着,本报知装置的第4变形例(第4变形装置)在路径交叉报知条件和“第7先行报知条件”中的至少一个已成立的情况下执行对向车辆报知处理。
379.<<第7先行报知条件>>
380.第7先行报知条件是在上述的“条件(a1)、条件(a2)以及条件(b3a)”和以下描述的条件(g4)全部已成立时成立的条件。即,第7先行报知条件在上述的第1先行报知条件成立、进而条件(g4)已成立时成立。
381.条件(a1):右方指示器43r处于工作状态(闪烁)。
382.条件(a2):存在对向车辆。
383.条件(b3a):车辆10的右转通过区域中不包含右方区划线。
384.条件(g4):不存在后述的“横穿车辆”。
385.参照图13对第7先行报知条件进行说明。在图13中,车辆10的当前位置由车辆位置10z表示。在本例中,驾驶员正要使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10z经过车辆位置10a以及车辆位置10b到达车辆位置10c。虚线le7表示驾驶员所意图的车辆10的行驶路径。
386.图13所示的其他车辆69是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10z的时间点的其他车辆69的位置由其他车辆位置69z表示。车辆10处于车辆位置10a的时间点的其他车辆69的位置由其他车辆位置
69a表示。车辆10处于车辆位置10b的时间点的其他车辆69的位置由其他车辆位置69b表示。
387.处于其他车辆位置69z的其他车辆69的对向车辆预想路径由虚线ls4表示。在本例中,其他车辆69正在直行。
388.驾驶员在车辆10到达了车辆位置10z时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10z时,条件(a1)成立。
389.省略详细描述,但至少在“车辆10行驶在车辆位置10z~车辆位置10b的区间的期间”,其他车辆69满足对向车辆的要件(即条件(a)~(e))。因此,条件(a2)成立。另一方面,条件(a3)和条件(a4)在车辆10通过了车辆位置10a之后成立。换言之,在车辆10到达了车辆位置10a的时间点,条件(a3)和条件(a4)均不成立。在本例中,在车辆10从车辆位置10a行进到车辆位置10b的中途的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
390.另一方面,当车辆10到达车辆位置10a时,变为作为车辆10的右转通过区域的区域rpn中不包含右方区划线。也就是说,在车辆10到达了车辆位置10a的时间点,条件(b3a)成立。
391.图13所示的其他车辆71是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10z的时间点的其他车辆71的位置由其他车辆位置71z表示。车辆10处于车辆位置10a的时间点的其他车辆71的位置由其他车辆位置71a表示。车辆10处于车辆位置10b的时间点的其他车辆71的位置由其他车辆位置71b表示。
392.第4变形装置的车辆控制ecu25(以下也简称为“ecu25”。)至少在“车辆10行驶在车辆位置10z~车辆位置10b的区间的期间”中判定为其他车辆71是横穿车辆。
393.更具体地描述,横穿车辆的满足全部的上述的条件(a)和以下的条件(h)以及条件(i)的摄像头检测目标物。即,若以下所列举的“条件(a)、条件(h)以及条件(i)”全部成立,则ecu25判定为存在横穿车辆。其结果,ecu25判定为条件(g4)不成立。此外,为了便于说明,存在横穿车辆这一条件也被称为“禁止条件”。
394.条件(a):存在摄像头检测目标物,且其目标物类别为“车辆”。
395.条件(h):该摄像头检测目标物为另外于对向车辆的目标物(其他车辆),该摄像头检测目标物的“横穿车辆预想路径”与对向车辆的对向车辆预想路径相互交叉。
396.条件(i):交叉时间tr为预定的第2阈值时间tth2以下(即tr≤tth2)。
397.其他车辆71是目标物类别为“车辆”的摄像头检测目标物,因此,条件(a)成立。对条件(h)进行说明。横穿车辆预想路径是该摄像头检测目标物的预想行驶路径。对于横穿车辆预想路径,基于摄像头检测目标物的位置(即横向位置dx和纵向位置dy)以及速度(即横向相对速度vx和纵向相对速度vy),根据该速度和移动方向不变化而被维持这一假定来取得。
398.在图13中,处于其他车辆位置71z的其他车辆71的横穿车辆预想路径由虚线ls5表示。在本例中,其他车辆71正在直行。因此,处于其他车辆位置71a的其他车辆71的对向车辆预想路径由图13中的虚线ls5的与其他车辆位置71a相比处于纸面右方的区间表示。同样,处于其他车辆位置71b的其他车辆71的对向车辆预想路径由图13中的虚线ls5的与其他车辆位置71b相比处于纸面右方的区间表示。
399.如根据图13可理解的那样,虚线ls4和虚线ls5在点ps5相互交叉。换言之,至少在“车辆10行驶在车辆位置10z~车辆位置10b的区间的期间”,其他车辆71的横穿车辆预想路径与其他车辆69的对向车辆预想路径相互交叉,因此,条件(h)成立。
400.接着,对条件(i)进行说明。交叉时间tr是到具有横穿车辆预想路径作为预想路径的摄像头检测目标物到达对向车辆预想路径为止的时间。当前时间点(即,车辆10处于车辆位置10z的时间点)的其他车辆71的交叉时间tr是其他车辆71从其他车辆位置71z行驶到点ps5所需要的时间。在本例中,在车辆10到达了车辆位置10z的时间点,交叉时间tr变为与第2阈值时间tth2相等。因此,至少在“车辆10行驶在车辆位置10z~车辆位置10b的区间的期间”,条件(i)成立。
401.换言之,至少在“车辆10行驶在车辆位置10z~车辆位置10b的区间的期间”,其他车辆71满足横穿车辆的要件(即条件(a)、条件(h)以及条件(i)),因此,条件(g4)不成立。因此,第7先行报知条件不成立。因此,ecu25在车辆10到达了车辆位置10b时(即,路径交叉报知条件已成立时),开始报知处理。
402.(第4变形装置的具体工作)
403.第4变形装置的ecu25的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图14中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。
404.因此,当成为适当的定时时,cpu从图14的步骤1400开始处理,执行步骤605以后的步骤的处理。cpu在步骤620中判定为了“否”的情况下(即,在条件(a1)和条件(a2)成立、而条件(a3)不成立的情况下),进入步骤645。
405.cpu在步骤645中判定为了“是”的情况下(即,在条件(b3a)成立的情况下),进入步骤1450,判定是否处于不存在横穿车辆的状态。即,cpu判定条件(g4)是否成立。
406.若不存在横穿车辆(即,若条件(g4)成立),则cpu在步骤1450中判定为“是”而进入步骤630。即,在该情况下,第7先行报知条件成立,因此,cpu开始报知处理。
407.另一方面,若存在横穿车辆,cpu在步骤1450中判定为“否”而进入步骤1495,结束本例程的处理。
408.此外,若步骤645的判定条件不成立(即,若条件(b3a)不成立),则cpu在步骤645中判定为“否”而直接进入步骤1495。
409.以上,如所说明那样,根据第4变形装置,基于是否存在横穿车辆,判定禁止条件是否成立。因此,根据第4变形装置,对向车辆报知处理不会不必要地工作。
410.(本报知装置的第5变形例)
411.本报知装置的第5变形例(第5变形装置)在路径交叉报知条件和第1先行报知条件中的至少一方已成立的情况下执行对向车辆报知处理。
412.不过,第5变形装置的车辆控制ecu26(以下也简称为“ecu26”。)在第1先行报知条件已成立的情况下,在不存在(未保持有)关于对向车辆的“停止历史记录”时,作为对向车辆报知处理,执行“第1报知处理”和“第2报知处理”双方。与此相对,在第1先行报知条件已成立的情况下,在存在(保持有)关于对向车辆的“停止历史记录”时,作为对向车辆报知处理,仅执行第2报知处理。
413.第1报知处理是不使用扬声器47而使用显示器46来执行的报知处理。第2报知处理是不使用显示器46而使用扬声器47来执行的报知处理。第1报知处理和第2报知处理均被执
行的处理与上述的ecu21执行的对向车辆报知处理相同。即,上述的ecu21可以说构成为,在路径交叉报知条件、第1先行报知条件以及第2先行报知条件中的至少一个已成立时,一起开始第1报知处理和第2报知处理。
414.ecu26在第1先行报知条件已成立时,若存在关于对向车辆的“停止历史记录”,则进行不使用显示器46而使用了扬声器47的报知。与此相对,ecu在第1先行报知条件已成立时,若不存在关于对向车辆的“停止历史记录”,则进行使用了显示器46和扬声器47双方的报知。
415.接着,对上述的停止历史记录进行说明。ecu26在对向车辆的纵向位置dy比预定的第2阈值距离dth2小的情况下,在该对向车辆的目标物行驶速度vc为预定的第3阈值速度vth3以下时,判定为该对向车辆已停止。在第5变形例中,第3阈值速度vth3为“0”。ecu26当判定为对向车辆已停止时,在做出了该判定的时间点以后保持该对向车辆所涉及的停止历史记录。
416.参照图15对保持有停止历史记录的对向车辆的例子进行说明。在图15中,车辆10的当前位置由车辆位置10f表示。车辆10经过车辆位置10d和车辆位置10e而到达车辆位置10f。实线le8表示车辆10已经行驶的路径。
417.驾驶员在车辆10到达了车辆位置10e时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10e时,条件(a1)成立。
418.在本例中,驾驶员正要使车辆10在没有信号灯的交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10f经过车辆位置10g而到达车辆位置10h。虚线le9表示驾驶员所意图的车辆10的行驶路径。
419.图15所示的行人81刚走在人行横道上而横穿了道路。行人81的当前位置由行人位置81f表示。车辆10处于车辆位置10d的时间点的行人81的位置由行人位置81d表示。车辆10处于车辆位置10e的时间点的行人81的位置由行人位置81e表示。实线lw1表示行人81已经走过的路径。
420.其他车辆72是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物),是被识别为了对向车辆的车辆。车辆10从车辆位置10d行驶到车辆位置10e的期间中的其他车辆72的位置由其他车辆位置72d表示。更具体地描述,行人81走过处于其他车辆72的前方的人行横道,因此,其他车辆72在车辆10从车辆位置10d行驶到车辆位置10e的期间停止在了其他车辆位置72d。
421.然后(即,行人81完成了道路的横穿之后),其他车辆72重新开始行驶。车辆10处于车辆位置10f的时间点的其他车辆72的位置由其他车辆位置72f表示。实线ls6表示其他车辆72已经行驶的路径。
422.车辆10处于车辆位置10g的时间点的其他车辆72的位置由其他车辆位置72g表示。处于其他车辆位置72f的其他车辆72的对向车辆预想路径由虚线ls7表示。在本例中,其他车辆72正在直行。因此,处于其他车辆位置72g的其他车辆72的对向车辆预想路径由图15中的虚线ls7的与其他车辆位置72g相比处于纸面下方的区间表示。
423.在该例子中,在其他车辆72的位置到达了其他车辆位置72d的时间点以后,存在其他车辆72的停止历史记录。更具体地描述,在车辆10到达了车辆位置10d的时间点(其他车辆72的位置到达了其他车辆位置72d的时间点),其他车辆72的目标物行驶速度vc变为与第
3阈值速度vth3(=0)相等,并且,该时间点的其他车辆72的纵向位置dy比第2阈值距离dth2小。由此,ecu26判定为作为对向车辆的其他车辆72已停止。由此,在车辆10到达了车辆位置10e的时间点,其他车辆72开始了行驶,但保持有(存在)其他车辆72的停止历史记录。
424.省略详细描述,但至少在“车辆10行驶在车辆位置10f~车辆位置10g的区间的期间”,其他车辆72满足对向车辆的要件(即条件(a)~(e)),因此,条件(a2)成立。然而,在车辆10到达了车辆位置10f的时间点,条件(a3)和条件(a4)均不成立。此外,在本例中,在车辆10到达了车辆位置10g之后的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
425.而且,当车辆10到达车辆位置10f时,作为车辆10的右转通过区域的区域rpo中不包含右方区划线。也就是说,在车辆10到达了车辆位置10f的时间点,条件(b3a)成立。因此,在车辆10到达了车辆位置10f的地点,第1先行报知条件成立。
426.在该情况下(即,在第1先行报知条件已成立的情况下),如上所述,第5变形装置的车辆控制ecu26在存在关于对向车辆的“停止历史记录”时,作为对向车辆报知处理,仅执行第2报知处理。由此,在上述的例子中,存在对向车辆(即其他车辆72)的停止历史记录,因此,ecu26在车辆10到达车辆位置10f而第1先行报知条件已成立时,开始第2报知处理(使用扬声器47来执行的报知处理)。然后,在车辆10到达了车辆位置10g的情况下(即,在路径交叉报知条件已成立的情况下),ecu26开始第1报知处理。即,ecu26在第2报知处理的基础上执行第1报知处理(使用显示器46来执行的报知处理)。
427.与此相对,若不存在其他车辆72的停止历史记录,则ecu26在车辆10到达了车辆位置10f时一起开始第1报知处理和第2报知处理。
428.(第5变形装置的具体工作)
429.第5变形装置的驾驶辅助ecu26的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图16中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。
430.因此,当成为适当的定时时,cpu从图16的步骤1600开始处理而进入步骤1605,判定是否处于未执行第2报知处理的状态。换言之,在第1报知处理和第2报知处理均被执行时以及仅执行第2报知处理时,cpu在步骤1605中判定为“否”,进入步骤635。
431.若步骤635的判定条件不成立(即,若报知结束条件不成立),则cpu在步骤635中判定为“否”而进入步骤610。
432.而且,在cpu进入到了步骤1605的时间点,若未执行第2报知处理,则cpu在步骤1605中判定为“是”而进入步骤610。
433.cpu在步骤625中判定为了“是”的情况下(即,在路径交叉报知条件成立的情况下),进入步骤1630,执行第1报知处理。更具体地描述,若未执行第1报知处理(即,若第1报知处理未已经开始),则cpu通过在显示器46显示对向车辆警告记号来开始第1报知处理。另一方面,若正在执行第1报知处理,则cpu继续执行第1报知处理。
434.接着,cpu进入步骤1632,执行第2报知处理。更具体地描述,若未执行第2报知处理(即,若第2报知处理未已经开始),则cpu通过使扬声器47产生对向车辆警告音来开始第2报知处理。另一方面,若执行第2报知处理,则cpu继续执行第2报知处理。然后,cpu进入步骤1695,结束本例程的处理。
435.cpu在步骤645中判定为了“是”的情况下(即,在路径交叉报知条件未成立、但因条件(b3a)成立而第1先行报知条件成立的情况下),进入步骤1650。cpu在步骤1650中判定是否保持有(存在)关于对向车辆的停止历史记录。
436.若保持有(存在)关于对向车辆的停止历史记录,则cpu在步骤1650中判定为“是”而进入步骤1632,作为对向车辆报知处理,执行第2报知处理。另一方面,若关于对向车辆未保持有(不存在)停止历史记录,则cpu在步骤1650中判定为“否”而进入步骤1630和步骤1632。其结果,作为对向车辆报知处理,一起执行“第1报知处理和第2报知处理”。
437.根据第5变形装置,基于是否存在关于对向车辆的停止历史记录,判定禁止条件是否成立。因此,根据第5变形装置,第1报知处理不会不必要地工作。
438.而且,根据第5变形装置,在禁止条件成立时,不执行第2报知处理,仅执行第1报知处理。因此,能够降低因执行报知处理而驾驶员感觉麻烦的可能性。
439.此外,为了便于说明,在保持有(存在)对向车辆所涉及的停止历史记录时成立的条件也被称为“禁止条件(停止历史记录禁止条件)”。进而,第5变形装置的变形例也可以在停止历史记录禁止条件成立时,不仅禁止第1报知处理,也禁止第2报知处理。即,cpu也可以在图16的步骤1650中判定为了“是”的情况下,不进入步骤1632,而直接进入步骤1695。
440.(本报知装置的第6变形例)
441.本报知装置的第6变形例(第6变形装置)在路径交叉报知条件、“第8先行报知条件”以及“第9先行报知条件”中的至少一个已成立的情况下执行对向车辆报知处理。
442.<<第8先行报知条件>>
443.第8先行报知条件是在上述的“条件(a1)、条件(a2)以及条件(b3a)”和以下描述的“条件(h4a)以及条件(h5a)”全部已成立时成立的条件。即,第8先行报知条件在以下的全部条件已成立时成立。
444.条件(a1):右方指示器43r处于工作状态(闪烁)。
445.条件(a2):存在对向车辆。
446.条件(b3a):车辆10的右转通过区域中不包含右方区划线。
447.条件(h4a):车辆10的车速vs为预定的第4阈值速度vth4以下(即vs≤vth4)。
448.条件(h5a):对向车辆的横向位置dx的大小(横向距离|dx|)比预定的第3阈值距离dth3小(即|dx|<dth3)。第3阈值距离dth3被预先设定为与对向车辆行驶在与行驶车道相邻的车道(右方相邻车道)上时可取的横向位置dx的大小(横向距离|dx|)中的上限值大致一致。
449.<<第9先行报知条件>>
450.第9先行报知条件是在上述的“条件(a1)、条件(a2)以及条件(b3a)”和以下描述的“条件(h4b)以及条件(h5b)”全部已成立时成立的条件。即,第9先行报知条件在以下的全部条件已成立时成立。
451.条件(a1):右方指示器43r处于工作状态(闪烁)。
452.条件(a2):存在对向车辆。
453.条件(b3a):车辆10的右转通过区域中不包含右方区划线。
454.条件(h4b):车辆10的车速vs比第4阈值速度vth4大(即vs>vth4)。
455.条件(h5b):对向车辆的横向位置dx的大小(横向距离|dx|)比预定的第4阈值距离
dth4小(即|dx|<dth4)。第4阈值距离dth4是比第3阈值距离dth3大的值(即dth3<dth4),被预先设定为与对向车辆行驶在“相对于车辆10而在右方相邻车道的更右侧相邻的车道”上时可取的横向位置dx的大小(横向距离|dx|)中的上限值大致一致。
456.此外,第8先行报知条件所包括的“条件(h4a)以及条件(h5a)”和第9先行报知条件所包括的“条件(h4b)以及条件(h5b)”的条件可以汇总为以下的条件(h6)。
457.条件(h6):对向车辆的横向位置dx的大小(横向距离|dx|)比横向阈值距离(dxyth)小,车辆10的车速vs越大,则该横向阈值距离(dxyth)越大。
458.参照图17对第8先行报知条件进行说明。在图17中,车辆10的当前位置由车辆位置10j表示。在本例中,驾驶员正要使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10j经过车辆位置10k和车辆位置10l而到达车辆位置10m。虚线le10表示驾驶员所意图的车辆10的行驶路径。
459.图17所示的其他车辆73是基于前方图像检测到的其他车辆(即目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10j的时间点的其他车辆73的位置由其他车辆位置73j表示。车辆10处于车辆位置10k的时间点的其他车辆73的位置由其他车辆位置73k表示。车辆10处于车辆位置10l的时间点的其他车辆73的位置由其他车辆位置73l表示。
460.处于其他车辆位置73j的其他车辆73的对向车辆预想路径由虚线ls8表示。在本例中,其他车辆73正在直行。
461.驾驶员在车辆10到达了车辆位置10j时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10j时,条件(a1)成立。
462.省略详细描述,但至少在“车辆10行驶在车辆位置10j~车辆位置10l的区间的期间”,其他车辆73满足对向车辆的要件(即条件(a)~(e))。因此,在该期间,条件(a2)成立。另一方面,在车辆10到达了车辆位置10k的时间点,条件(a3)和条件(a4)均不成立。此外,在本例中,在车辆10到达了车辆位置10l之后的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
463.进而,当车辆10到达车辆位置10k时,作为车辆10的右转通过区域的区域rpp中不包含右方区划线。也就是说,在车辆10到达了车辆位置10k的时间点,条件(b3a)成立。
464.在本例中,在车辆10到达了车辆位置10k的时间点,车速vs为第4阈值速度vth4以下。由此,在该时间点,条件(h4a)成立。进而,如根据图17可理解的那样,该时间点的其他车辆73的横向位置dx的大小(|dx|)比第3阈值距离dth3小,因此,条件(h5a)成立。因此,在车辆10到达了车辆位置10k的时间点,第8先行报知条件成立。
465.接着,参照图18对第9先行报知条件进行说明。在图18中,车辆10的当前位置由车辆位置10n表示。在本例中,驾驶员正要使车辆10在交叉路口右转。具体而言,驾驶员正要使车辆10从车辆位置10n经过车辆位置10p和车辆位置10q而到达车辆位置10r。虚线le11表示驾驶员所意图的车辆10的行驶路径。
466.图18所示的其他车辆74是基于前方图像检测到的其他车辆(即,目标物类别为“车辆”的摄像头检测目标物)。车辆10处于车辆位置10n的时间点的其他车辆74的位置由其他车辆位置74n表示。车辆10处于车辆位置10p的时间点的其他车辆74的位置由其他车辆位置74p表示。车辆10处于车辆位置10q的时间点的其他车辆74的位置由其他车辆位置74q表示。
467.处于其他车辆位置74n的其他车辆74的对向车辆预想路径由虚线ls9表示。在本例
中,其他车辆74正在直行。
468.驾驶员在车辆10到达了车辆位置10n时使右方指示器43r的工作(闪烁)开始。因此,在车辆10到达了车辆位置10n时,条件(a1)成立。
469.省略详细描述,但至少在“车辆10行驶在车辆位置10n~车辆位置10q的区间的期间”,其他车辆74满足对向车辆的要件(a)~(e)。因此,在该期间,条件(a2)成立。另一方面,在车辆10到达了车辆位置10p的时间点,条件(a3)和条件(a4)均不成立。此外,在本例中,在车辆10到达了车辆位置10q之后的时间点,条件(a3)和条件(a4)成立,其结果,路径交叉报知条件成立。
470.进而,当车辆10到达车辆位置10p时,作为车辆10的右转通过区域的区域rpq中不包含右方区划线。也就是说,在车辆10到达了车辆位置10p的时间点,条件(b3a)成立。
471.在本例中,在车辆10到达了车辆位置10p的时间点,车速vs比第4阈值速度vth4大。由此,在该时间点,条件(h4b)成立。进而,如根据图18可理解的那样,该时间点的其他车辆74的横向位置dx的大小(|dx|)比第4阈值距离dth4小,因此,条件(h5b)成立。因此,在车辆10到达了车辆位置10p的时间点,第9先行报知条件成立。
472.(第6变形装置的具体工作)
473.第6变形装置的驾驶辅助ecu27的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图19中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。
474.因此,当成为适当的定时时,cpu从图19的步骤1900开始处理,执行步骤605以后的步骤的处理。cpu在645中判定为了“是”的情况下(即,在条件(a1)、条件(a2)以及条件(b3a)成立的情况下),进入步骤1945,判定车辆10的车速vs是否为第4阈值速度vth4以下。即,cpu判定条件(h4a)是否成立。
475.若车速vs为第4阈值速度vth4以下,则cpu在步骤1945中判定为“是”而进入步骤1950,判定对向车辆的横向位置dx的大小(|dx|)是否比第3阈值距离dth3小。即,cpu判定条件(h5a)是否成立。
476.若对向车辆的横向位置dx的大小(|dx|)比第3阈值距离dth3小时,cpu在步骤1950中判定为“是”而进入步骤630。即,在该情况下,第8先行报知条件成立,因此,cpu开始报知处理。
477.另一方面,若车速vs比第4阈值速度vth4大(即,若条件(h4b)成立),则cpu在步骤1945中判定为“否”而进入步骤1955,判定对向车辆的横向位置dx的大小(|dx|)是否比第4阈值距离dth4小。即,cpu判定条件(h5b)是否成立。
478.若对向车辆的横向位置dx的大小(|dx|)比第4阈值距离dth4小,则cpu在步骤1955中判定为“是”而进入步骤630。即,在该情况下,第9先行报知条件成立,因此,cpu开始报知处理。与此相对,在对向车辆的横向位置dx的大小(|dx|)为第4阈值距离dth4以上的情况下,cpu在步骤1955中判定为“否”而直接进入步骤1995。
479.此外,若步骤1950的判定条件不成立(即,若对向车辆的横向位置dx的大小(|dx|)为第3阈值距离dth3以上),则cpu在步骤1950中判定为“否”而直接进入步骤1995。
480.根据第6变形装置,能够在对向车辆行驶在右方相邻车道上的情况以及对向车辆行驶在右方相邻车道的更右方的车道上的情况的各个情况下,在合适的定时进行对向车辆
报知处理。
481.(本报知装置的第7变形例)
482.本报知装置的第7变形例(第7变形装置)在路径交叉报知条件和“第10先行报知条件”中的至少一个已成立的情况下执行对向车辆报知处理。
483.<<第10先行报知条件>>
484.第10先行报知条件是在上述的“条件(a1)、条件(a2)以及条件(b3a)”和以下描述的条件(j4)全部已成立时成立的条件。即,第10先行报知条件在以下的全部条件已成立时成立。
485.条件(a1):右方指示器43r处于工作状态(闪烁)。
486.条件(a2):存在对向车辆。
487.条件(b3a):车辆10的右转通过区域中不包含右方区划线。
488.条件(j4):后述的“禁止条件(特定禁止条件)”不成立。
489.条件(j4)的禁止条件(特定禁止条件)是在以下的条件(j)、条件(k)以及条件(m)全部已成立时成立的条件。
490.<<<特定禁止条件>>>
491.条件(j):转向角度θs比预定的正的阈值角度θth小(即0<θth且θs<θth)。即,转向角度θs是使车辆10转弯以使得横穿对向车道的方向的值,该转向角度θs的大小|θs|比阈值角度θth小(|θs|<θth)。
492.条件(k):制动器踏板操作量bp比预定的阈值操作量bth大(即bp>bth)。即,制动器处于工作中。
493.条件(m):车辆10的车速vs为预定的第5阈值速度vth5以下(即vs≤vth5)。
494.在本变形例中,阈值操作量bth为“0”。为了便于说明,第5阈值速度vth5也被称为“特定速度”。
495.(第7变形装置的具体工作)
496.第7变形装置的驾驶辅助ecu28的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图20中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。
497.因此,当成为适当的定时时,cpu从图20的步骤2000开始处理,执行步骤605以后的步骤的处理。cpu在645中判定为了“是”的情况下(即,在条件(a1)、条件(a2)以及条件(b3a)成立的情况下),进入步骤2050,判定转向角度θs是否比阈值角度θth小。即,cpu判定条件(j)是否成立。
498.若转向角度θs为阈值角度θth以上(即,若条件(j)不成立从而禁止条件(特定禁止条件)不成立),则cpu在步骤2050中判定为“否”而进入步骤630。即,在该情况下,第10先行报知条件成立,因此,cpu开始报知处理。然后,cpu进入步骤2095而结束本例程的处理。
499.另一方面,若转向角度θs比阈值角度θth小,则cpu在步骤2050中判定为“是”而进入步骤2055,判定制动器踏板操作量bp是否比阈值操作量bth大。即,cpu判定条件(k)是否成立。若制动器踏板操作量bp为阈值操作量bth以下(即,若条件(k)不成立从而禁止条件(特定禁止条件)不成立),则cpu在步骤2055中判定为“否”而进入步骤630,开始报知处理。
500.若制动器踏板操作量bp比阈值操作量bth大,则cpu在步骤2055中判定为“是”而进
入步骤2060,判定车速vs是否比第5阈值速度vth5小。即,cpu判定条件(m)是否成立。若车速vs为第5阈值速度vth5以上(即,若条件(m)不成立从而禁止条件(特定禁止条件)不成立),则cpu在步骤2060中判定为“否”而进入步骤630,开始报知处理。
501.另一方面,若车速vs比第5阈值速度vth5小(即,若禁止条件成立),则cpu在步骤2060中判定为“是”而直接进入步骤2095。
502.根据第7变形装置,基于转向角度θs、制动器踏板操作量bp以及车速vs来判定禁止条件是否成立。因此,根据第7变形装置,对向车辆报知处理不会不必要地工作。
503.(本报知装置的第8变形例)
504.接着,对本报知装置的第8变形例(第8变形装置)进行说明。上述的本报知装置和变形例当条件(c1)~条件(c3)中的至少一个成立时,结束报知处理。与此相对,第8变形装置在后述的“第1报知结束条件”已成立的时间点、和后述的“第2报知结束条件”已成立的状态持续了预定的第3阈值时间tth3以上的时间点中的任一个先到来的时间点,结束报知处理。以下,具体进行说明。
505.第1报知结束条件基于驾驶员的驾驶操作的状态来判定是否成立。更具体地描述,第1报知结束条件是在判定(推定)为车辆10的驾驶员识别到对向车辆的存在的可能性高时成立的条件。
506.<<第1报知结束条件>>
507.在本变形例中,第1报知结束条件在以下描述的结束条件(end11)和结束条件(end12)均已成立时成立。
508.结束条件(end11):转向速度ws为负值,该转向速度ws是转向角度θs的每单位时间的变化量。即,驾驶员正在向左方操作方向盘51。
509.结束条件(end12):转向速度ws的大小绝对值|ws|比预定的阈值角速度wth大(即|ws|>wth>0)。阈值角速度wth被预先设定为与在车辆10开始右转后注意到了对向车辆的存在的驾驶员向左方操作方向盘51的情况下的阈值角速度wth的大小的下限值大致一致。在本变形例中,为了便于说明,转向角度传感器45也被称为“驾驶状态传感器或者驾驶操作状态传感器”。
510.<<第2报知结束条件>>
511.第2报知结束条件基于车辆10的车速vs和周围信息中的至少一方来进行判定。更具体地描述,第2报知结束条件是在判定为变为了没有车辆10与对向车辆碰撞的可能性时成立的条件。在本变形例中,第2报知结束条件是在条件(c2)已成立时(即,变为了不存在对向车辆时)成立的条件。
512.(第8变形装置的具体工作)
513.第8变形装置的驾驶辅助ecu29(以下也简称为“ecu29”。)的cpu31(以下也简称为“cpu”。)每当经过预定时间时执行图21中由流程图表示的“对向车辆报知判定处理例程”来代替图6所示的“对向车辆报知判定处理例程”。图21所示的例程是从图6所示的例程删除了步骤635和步骤640的例程。
514.而且,cpu每当经过比第3阈值时间tth3短的预定时间时执行图22中由流程图表示的“对向车辆报知结束处理例程”。
515.此外,对于在图22的例程中使用的报知标志xw的值,在进行了对车辆10的点火开
关(未图示)的接通(on)操作时,通过由cpu执行的初始化例程(未图示)而被设定为“0”。
516.当成为适当的定时时,cpu从图21的步骤2100开始处理而进入步骤605。cpu当在步骤605中判定为“否”时,直接进入步骤2195,结束本例程的处理。与此相对,cpu当在步骤605中判定为“是”时,进行步骤610以后的步骤的处理。由此,当路径交叉报知条件、第1先行报知条件以及第2先行报知条件中的至少一个成立时,开始报知处理(步骤630)。
517.当成为适当的定时时,cpu从图22的步骤2200开始处理而进入步骤2205,判定当前时间点的状态是否为正在执行报知处理的状态。若当前时间点的状态不是正在执行报知处理的状态,则cpu在步骤2205中判定为“否”而进入步骤2295,结束本例程的处理。
518.与此相对,在当前时间点的状态为正在执行报知处理的状态的情况下,cpu在步骤2205中判定为“是”而进入步骤2210,判定上述的第1报知结束条件(在车辆10开始右转后注意到了对向车辆的存在的驾驶员向左方操作方向盘51时成立的条件)是否成立。即,cpu判定结束条件(end11)和结束条件(end12)是否均成立。若第1报知结束条件成立,则cpu在步骤2210中判定为“是”而进入步骤640,结束报知处理。
519.接着,cpu进入步骤2245,判定报知标志xw的值是否为“1”。如后述那样,报知标志xw的值在报知处理的执行期间第2报知结束条件已成立时被设定为“1”(参照步骤2270。)。在cpu进入到了步骤2245时,若报知标志xw的值为“1”,则cpu在步骤2245中判定为“是”而进入步骤2250,将报知标志xw的值设定为“0”。然后,cpu进入步骤2295。
520.与此相对,在cpu进入到了步骤2245时,若报知标志xw的值不为“1”(即,若报知标志xw的值为“0”),则cpu在步骤2245中判定为“否”而直接进入到步骤2295。
521.在cpu进入到了步骤2210时,若第1报知结束条件不成立,则cpu在步骤2210中判定为“否”而进入步骤2255,判定第2报知结束条件是否成立。即,cpu判定是否不存在对向车辆。
522.若第2报知结束条件成立,则cpu在步骤2255中判定为“是”而进入步骤2260,判定报知标志xw的值是否为“1”。若报知标志xw的值为“0”,则cpu在步骤2260中判定为“否”而进入步骤2270,将报知标志xw的值设定为“1”。而且,cpu将报知标志xw的值被设定为了“1”的时刻(标志变更时刻)存储于ram33。然后,cpu进入步骤2295。
523.在接着执行了本例程时,若第1报知结束条件不成立、且第2报知结束条件已成立的状态持续,则cpu经过步骤2205、步骤2210以及步骤2255而进入步骤2260。cpu在步骤2260中判定为“是”而进入步骤2265。
524.在步骤2265中,cpu在报知标志xw的值成为了“1”之后,判定是否经过第3阈值时间tth3以上。具体而言,cpu判定当前时刻是否为从存储于ram33的标志变更时刻经过了第3阈值时间tth3以上的时刻以后的时刻。
525.在报知标志xw的值成为了“1”之后,若未经过第3阈值时间tth3以上,则cpu在步骤2265中判定为“否”而直接进入步骤2295。与此相对,在报知标志xw的值成为了“1”之后,若经过第3阈值时间tth3以上,则cpu在步骤2265中判定为“是”而进入步骤640。在该情况下,在步骤640中结束报知处理,并且,在步骤2250中,报知标志xw的值被设定为“0”。
526.此外,若步骤2255的判定条件不成立(即,若第2报知结束条件不成立),则cpu在步骤2255中判定为“否”而进入步骤2245。cpu也可以在步骤2255中判定为了“否”的情况下,直接进入步骤2295。
527.根据第8变形装置,在第1报知结束条件已成立的情况下(即,在推定为车辆10的驾驶员注意到了对向车辆的存在的情况下),报知处理立刻被结束。进而,根据第8变形装置,在第2报知结束条件已成立的状态(不存在对向车辆的状态)持续了第3阈值时间tth3以上时,报知处理被结束。由此,能够在确认到更安全的状态时,结束报知处理。
528.以上,对本发明涉及的报知装置的实施方式以及变形例进行了说明,但本发明并不限定于上述实施方式以及变形例,可以在本发明的范围内采用各种变形例。例如,上述实施方式和变形例的特定方向为右方。但是,在具有规定了车辆在道路的右侧通行的法规的地域(右侧通行地域),特定方向成为左方。
529.而且,在本实施方式中,右转通过区域是基于固定值(具体而言为距离dx1、距离dy1、距离dy2以及车宽wd)来划定的区域。但是,右转通过区域也可以是与此不同的区域。例如,也可以以行驶车道的宽度(即右方区划线与左方区划线之间的距离)越大则右转通过区域的x轴方向上的长度越大的方式,划定右转通过区域。
530.而且,本实施方式的ecu21~ecu29各自若上述的条件(a)~条件(e)全部成立,则判定为存在对向车辆。然而,用于判定摄像头检测目标物是否为对向车辆的条件也可以与此不同。
531.例如,ecu21~ecu29各自也可以构成为,在摄像头检测目标物的纵向位置dy为正值、且比预定的第5阈值距离dth5小时(即0<dy<dth5),判定为条件(b)成立。
532.或者,ecu21~ecu29各自也可以构成为,在条件(a)~条件(e)和以下的条件(n)全部成立时,判定为存在对向车辆。
533.条件(n):参照时间tt的大小比预定的基准时间ts小(即|tt|<ts),该参照时间tt是将该摄像头检测目标物的纵向位置dy除以纵向相对速度vy而得到的值。在该情况下,与车辆10的距离比较长的其他车辆、或者到接近车辆10为止需要长时间的其他车辆不会被判定为对向车辆。
534.而且,本实施方式的ecu22和ecu23等将自身车辆预想路径作为直线或者曲线而取得,基于该自身车辆预想路径与“其他车辆的左端位置以及该其他车辆的右端位置”的位置关系,判定条件(g)是否成立。然而,条件(g)也可以与此不同。例如,ecu22和ecu23等也可以构成为,将相对于自身车辆预想路径而在左右方向上具有预定宽度(例如车宽wd的一半(wd/2)或者对车宽的一半加上余裕α而得到的值(α wd/2))的带状的区域作为行进预想区域而取得。即,行进预测区域是在车辆10行进时通过的区域,是其宽度为大致车宽wd的区域。并且,这些ecu各自也可以构成为,在该行进预想区域中包含摄像头检测目标物(具体而言为其他车辆)的一部分或者全部时,判定为条件(g)成立。
535.而且,若右转通过区域中包含右方区划线(具体而言为由白色或者黄色的实线或者虚线描绘的路面标示),则判定为条件(b3b)成立,但也可以在右转通过区域中包含中央隔离带时也判定为条件(b3b)成立。
536.而且,本实施方式的ecu22在条件(a1)、条件(a2)以及条件(d3)全部已成立时,判定为第3先行报知条件成立。但是,ecu22也可以构成为,在条件(a1)、条件(a2)以及条件(d3)和以下的条件(d4)全部已成立时,判定为第3先行报知条件成立。
537.条件(d4):前行车辆的右方侧的方向指示器处于工作(闪烁)状态,前行车辆的左方侧的方向指示器处于不工作状态。
538.在该情况下,ecu22基于前方图像的历史记录(在预定期间取得的多个前方图像),判定前行车辆的方向指示器是否处于工作状态。
539.而且,ecu25判定为满足全部的条件(a)、条件(h)以及条件(i)的摄像头检测目标物为横穿车辆。然而,ecu25也可以构成为,判定为满足全部的条件(a)、条件(h)、条件(i)以及以下的条件(p)的摄像头检测目标物为横穿车辆。进而,ecu25也可以构成为,将条件(h)置换为条件(p),判定为满足全部的条件(a)、条件(i)以及条件(p)的摄像头检测目标物为横穿车辆。
540.条件(p):该摄像头检测目标物是另外于对向车辆的目标物(其他车辆),且该目标物的“横穿车辆预想路径”与自身车辆预想路径相互交叉。
541.而且,ecu26在对向车辆的纵向位置dy比第2阈值距离dth2小、且该对向车辆的目标物行驶速度vc为预定的第3阈值速度vth3以下时,判定为该对向车辆已停止。然而,ecu26也可以构成为,在基于前方图像检测到的对向车辆的目标物行驶速度vc成为了第3阈值速度vth3以下时,无论纵向位置dy如何都判定为该对向车辆已停止。
542.而且,ecu29基于转向速度ws判定第1报知结束条件是否成立。但是,ecu29也可以构成为,在左侧通行地域中,在转向角度θs比预定的负的阈值角度θth小时,判定为第1报知结束条件成立。或者,ecu29也可以构成为,在右通行地域中,在转向角度θs比预定的正的阈值角度θth大时,判定为第1报知结束条件成立。进而,ecu29也可以构成为,基于车辆10的横摆率的变化,判定为第1报知结束条件成立。
543.而且,ecu29在变为了不存在对向车辆时,判定为第2报知结束条件已成立。然而,ecu29也可以构成为,在车速vs比预定的阈值速度大时,判定为第2报知结束条件成立。或者,ecu29也可以构成为,基于前方图像来判定对向车辆的方向指示器是否工作(闪烁),在判定为了对向车辆的方向指示器正在工作时,判定为第2报知结束条件成立。
544.而且,第3阈值速度vth3和阈值操作量bth均为“0”。但是,第3阈值速度vth3和阈值操作量bth中的一方或者双方也可以是比“0”大的值(例如微小的值)。
545.而且,在本实施方式和变形例中,对向车辆和前行车辆基于前方图像来检测。即,对向车辆和前行车辆使用前方摄像头41来检测。但是,对向车辆和前行车辆中的至少一方也可以由与前方摄像头41不同的传感器来检测。例如,对向车辆和前行车辆中的至少一方也可以由lidar(laser imaging detection and ranging,激光成像探测与测距)装置或者毫米波雷达装置来检测。
546.而且,通过本实施方式的ecu21~ecu29分别实现的功能也可以由多个ecu来实现。例如,基于前方图像检测立体目标物的处理也可以由前方摄像头41所包括的ecu来执行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。