1.本发明是关于一种可从由稻谷和糙米构成的混合颗粒判别稻谷、糙米的稻谷判别机。
背景技术:
2.以往,已知有一种辊式稻谷脱壳机,其使一对橡胶辊圆周速度彼此不同且往相反方向旋转,将稻谷供应至橡胶辊的间隙,由此辊间的圆周速度差而将稻壳剪切破坏,进行稻谷脱壳。虽然该稻谷脱壳机的脱壳率比冲击式稻谷脱壳机(离心脱壳机)差,但每小时碾出糙米量(稻谷脱壳能力)比冲击式稻谷脱壳机,因此实用性高,市场占有率也大。
3.辊式稻谷脱壳机理想是仅使稻谷通过一对脱壳辊间一次,便可脱壳100%。然而,因辊直径、宽度、辊的同径异径的组合、辊的每分钟转速、圆周速度、圆周速度差率、圆周速度差长、橡胶辊间压力等度量要素的关系,而存在脱壳率为85~95%左右的情况。
4.因此,在辊式稻谷脱壳部附设各种方式的分选部,将脱壳100%的糙米排出至机外(即,不使稻谷排出至机外)而下了功夫。举例而言,已知有一种稻谷脱壳分选机(例如,参照专利文献1),其在由一对脱壳辊构成的稻谷脱壳部附设将通过了稻谷脱壳部的去谷米区分为糙米、稻谷及混合颗粒的摇动分选部,可将以该摇动分选部挑出的稻谷再脱壳而仅将优质的糙米排出至机外。并且,已知一种稻谷脱壳分选机(例如,参照专利文献2),其在由一对脱壳辊构成的稻谷脱壳部附设以颜色分选进行的稻谷分选部,可将以该稻谷分选部挑出的稻谷再脱壳而仅将优质的糙米排出至机外。
5.专利文献1中记载了将吊槽设置于机体的低处,从而可使机器总高降低而执行稳定且确实的稻谷脱壳作业的作用、效果。另外,在专利文献2记载有代替专利文献1那样的摇摆选别部附设以颜色进行分选的稻谷分选部,从而不需如摇动分选部那样的复杂的组装或角度调节作业,而能够排除振动及噪音的问题。并且,有使装置全体尽可能地小型且可自动化这样的作用、效果。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开昭59-186679号
9.专利文献2:日本特开昭60-190243号
10.专利文献3:日本特开平2-219747号
技术实现要素:
11.发明要解决的课题
12.然而,具有如专利文献1那样的摇动分选部的稻谷脱壳分选机在矩形分选板上形成多个凹部,使该分选板倾斜摇动,通过形状分选及比重分选使长度比稻谷短的糙米进入凹部后使糙米移送至分选板的上方。另一方面,未进入凹部的稻谷移送至分选板的下方使其偏析,由此进行分选。因而,若长度与糙米相同的稻谷进入凹部时,有可能无法分选出糙
米与稻谷。
13.另一方面,具有如专利文献2那样的以颜色进行分选的稻谷分选部的稻谷脱壳分选机的颜色分选部的设备具有光源、受光元件、喷射喷嘴、根据由受光元件检测出的光量的变化信号使喷射喷嘴工作的控制电路。并且,由于以光量变化这样的单色传感器(白、黑这样的单色的深浅的差异)的信号进行糙米与稻谷的判别,因此存在将糙米与稻谷混淆的情况。
14.此外,利用彩色拍摄机构,检测脱壳后的糙米与稻谷的混合颗粒中的糙米的比率(称为“脱壳率”)的装置(称为“脱壳率传感器”)是公知的。
15.记载于专利文献3的脱壳率传感器是在混合颗粒流下的斜槽配设频闪发光器及彩色拍摄单元,而与频闪发光器的断续的发光同步拍摄的脱壳率传感器。根据由彩色拍摄单元拍摄的图像信息分离出红色信号(r)、绿色信号(g)及蓝色信号(b)三个颜色信号,运算出他们的颜色成分的比率。并且,从运算出的颜色成分的比率通过预定运算计算出脱壳率。由此,可使信息量变多,并且可对三色的颜色成分利用比率的判别,进行正确的判别。
16.然而,记载于专利文献3的脱壳率传感器中,作为光源以频闪发光器闪烁,因此只能取得闪烁时的信息量,信息量较少。因此,存在判别及分选精确度差的情况。另外,由于通过彩色拍摄单元取得对混合颗粒照射来自频闪发光器的光时的反射光,因此只能取得光的反射成分,根据原料的流下状态不易分辨稻谷或糙米。
17.本发明是鉴于上述问题点提出的,其技术课题是提供取得在受光单元接收的光的反射成分与透射成分,而能够正确地进行稻谷与糙米的判别的稻谷判别机。
18.用于解决课题的手段
19.本技术方案1的发明是一种稻谷判别机,具有:流下滑槽,其使由稻谷和糙米构成的混合颗粒排列并流下;发光源,其对从所述流下滑槽排出的所述混合颗粒照射光;以及受光单元,其能够从照射到来自所述发光源的光的所述混合颗粒接收反射光和透射光,所述发光源具备:第1照明单元,其设置于所述混合颗粒的所述受光单元侧,且能够对该混合颗粒照射红色成分的光;以及第2照明单元,其设置于所述混合颗粒的远离所述受光单元的一侧,且能够对该混合颗粒照射绿色成分的光。
20.本技术方案2的发明是在方案1的稻谷判别机中,作为所述受光单元的受光结果,在所述绿色成分的光的受光量高于预定的绿色成分阈值的情况下,将排出的所述混合颗粒判别为糙米,在所述绿色成分的光的受光量低于所述预定的绿色成分阈值且红色成分的光的受光量高于预定的红色成分阈值的情况下,将排出的所述混合颗粒判别为稻谷。
21.本技术方案3的发明是在方案1或2的稻谷判别机中,所述发光源还具备:第3照明单元,其设置于将所述受光单元与所述混合颗粒连接的延长线上的位置,能够对该混合颗粒的背景板照射蓝色成分的光,作为所述受光单元的所述受光结果,在所述蓝色成分的光的受光量超出预定的范围的情况下,将从所述流下滑槽排出的物质判别为非所述混合颗粒的异物。
22.本技术方案4的发明是在方案1至3的任一项的稻谷判别机中,所述流下滑槽至少延伸设置至对所述混合颗粒照射光的所述受光单元的观察区域,且能够使来自所述发光源的光透射。
23.本技术方案5的发明是在方案1至4的任一项的稻谷判别机中,所述稻谷判别机搭
载于所述稻谷脱壳分选机,根据基于所述受光单元的所述受光结果计算出的脱壳率,进行催促脱壳机的调整的通知。
24.发明效果
25.根据方案1的发明,根据在本发明的验证实验所得,稻谷比起糙米,绿色成分的光的透射性较差,红色成分的光的反射性较高这样的见解,设置可对稻谷及糙米的混合颗粒照射红色成分的光的第1照明单元、及可照射绿色成分的光的第2照明单元,以受光单元接收各自的反射光及透射光,由此,比起以往,可使稻谷及糙米的判别精确度大幅地提高。
26.根据方案2的发明,在受光单元的绿色成分的光的受光量高于预定绿色成分阈值时,将排出的混合颗粒判别为糙米,在绿色成分的光的受光量低于上述预定绿色成分阈值,且红色成分的光的受光量高于预定红色成分阈值时,将从流下滑槽排出的混合颗粒判别为稻谷,因此不进行复杂的判别处理,而能够迅速地判别出混合颗粒的种类。
27.根据方案3的发明,在连结受光单元与混合颗粒的延长线上的位置具有可对背景板照射蓝色成分的光的第3照明单元,因此在蓝色成分的光的受光量超出预定范围时,能够迅速地判别从流下滑槽排出了混合颗粒以外的异物。
28.根据方案4的发明,由于将流下滑槽延伸设置至受光单元的观察区域,并且以玻璃等透明材料形成,因此与从以往那样的流下滑槽下端排出混合颗粒的情况相比,混合颗粒的颗粒不易产生空气阻力,颗粒的姿势稳定,因此能够使混合颗粒的判别精度提高。
29.根据方案5的发明,将本发明的稻谷判别机搭载于稻谷脱壳分选机,因此能够基于受光单元的混合颗粒的判别结果的脱壳率,对装置的管理者或操作员适当地进行催促脱壳机的调整的通知。
附图说明
30.图1是表示应用了本发明的稻谷分选机的稻谷脱壳分选机的一实施方式的概略截面图。
31.图2是表示本发明的稻谷分选机的一实施方式的示意图。
32.图3a是表示在本发明的稻谷分选机中稻谷及糙米的光的反射率与光的波长的关系的曲线图。
33.图3b是表示在本发明的稻谷分选机中稻谷及糙米的光的透射率与光的波长的关系的曲线图。
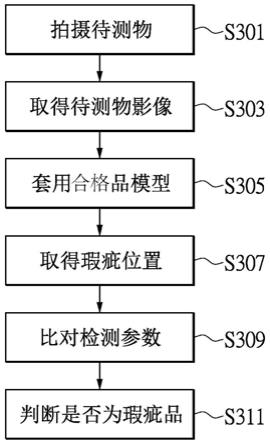
34.图4是说明在本发明的稻谷分选机中判别稻谷与糙米的判别方法的一实施方式的流程图。
35.图5是表示本发明的稻谷分选机的流下滑槽的另一实施方式的示意图。
36.图6是表示应用了本发明的稻谷分选机的稻谷脱壳分选机的另一实施方式的概略图。
具体实施方式
37.图1是应用了本发明的稻谷分选机的稻谷脱壳分选机的概略截面图。稻谷脱壳分选机1由稻谷脱壳部2和稻谷分选部3(稻谷分选机3)构成主要部分,其中,稻谷脱壳部2从稻谷将稻壳脱离而成为糙米,稻谷分选部3附设于该稻谷脱壳部2,可从在稻谷脱壳部2产生的
由稻谷及糙米构成的混合颗粒中仅分选、去除稻谷。
38.上述稻谷脱壳部2具有由原料料斗4构成的供应部5、由配置于供应部5的下部的一对脱壳辊6及辊间隙装置7构成的辊部8、在该辊部8的下部配置分选风路9而进行风选的风选部10、将通过该风选部10风选出的稻谷与糙米的混合颗粒移送至稻谷分选部3的混合颗粒扬谷部11。
39.上述稻谷分选部3具有由位于机体上部的混合颗粒料斗12、振动装置13、振动槽14构成的振动供给机构以及由倾斜状的流下滑槽15构成的流下供给机构。另外,上述稻谷分选部3在机体下部具有与上述流下滑槽15下端的混合颗粒的落下轨迹(图1中的虚线部r)对置地配置的光学检查部16(对应本发明的“稻谷判别机”)、根据该光学检查部16的检查结果对混合颗粒判别糙米与稻谷而仅将稻谷从混合颗粒排除的喷射部17。
40.然后,在上述喷射部17的下方设有在混合颗粒的落下轨迹的下方收集糙米的糙米收集斗18、回收从混合颗粒的落下轨迹排除的稻谷的稻谷回收斗19。并且,在上述糙米收集斗18设有具有将糙米排出至稻谷脱壳分选机1的外面的搬送机构的糙米排出部20,在稻谷回收斗19设有具有为了将稻谷再脱壳而移送稻谷的搬送机构的稻谷排出部21。作为稻谷排出部21,也可以设有能够将稻谷送回至脱壳辊式稻谷脱壳部2的扬谷机22。
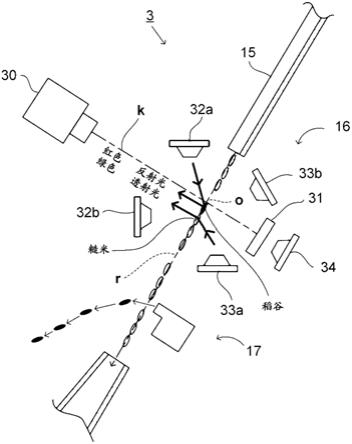
41.图2是稻谷分选部3的内部构造、特别是放大光学检查部16和喷射部17的示意图。以下,参照图2对作为本发明的主要部分的稻谷分选部3的构造进行说明。
42.如上所述,稻谷分选部3主要由配置于流下滑槽15的下方的光学检查部16和该光学检查部16的下方的喷射部17构成。并且,在光学检查部16中,在与在流下滑槽15的下游侧的由稻谷和糙米构成的混合颗粒的流下轨迹r相对的一侧(前方侧)设有全彩照相机(full color camera)30(受光单元)。并且,在该全彩照相机30的光轴k的隔着流下轨迹r的前端设有背景板(background)31。
43.在光学检查部16设有在比混合颗粒的流下轨迹r靠全彩照相机30的一侧对混合颗粒照射光的第1照明单元32a、32b、在比混合颗粒的流下轨迹r远离全彩照相机30的一侧对混合颗粒照射光的第2照明单元33a、33b以及对上述背景板31的背面照射光的第3照明单元34。此外,流下轨迹r与光轴k的交点为全彩照相机30的观察区域o。
44.上述的第1照明单元32a、32b、第2照明单元33a、33b和第3照明单元34分别具有单色的发光源,在本实施方式中作为最佳的示例,第1照明单元32a、32b采用由红色led元件构成的光源,第2照明单元33a、33b采用由绿色led元件构成的光源,第3照明单元34采用由蓝色led元件构成的光源。此外,所使用的led元件除了单色的led元件之外,也可以使用rgbled元件。
45.更详细地进行说明时,当从第1照明单元32a、32b对被分选物即混合颗粒照射红色成分的光时,其反射光被全彩照相机30的红色成分的受光元件接收。当从第2照明单元33a、33b对被分选物即混合颗粒照射绿色成分的光时,其透射光被全彩照相机30的绿色成分的受光元件接收。并且,当从第3照明单元34对背景板31照射蓝色成分的光时,通过全彩照相机30的蓝色成分的受光量来判别在该观察区域o被分选物是否通过,此外,被分选物即混合颗粒以外的异物是否通过。
46.此外,上述较佳的实施方式被如下述的理由印证。即,根据本发明的验证实验的结果,在图3a中用曲线图示出了糙米与稻谷的光的波长与反射率的关是,在图3b中用曲线图
示出了光的波长与透射率的关系,被分选物的对象即糙米、稻谷皆是其光的透射率不论绿色、红色均无太大差别。
47.另一方面,查看光的反射率时,可知红色比起绿色,糙米与稻谷的反射率的差较大。因而,根据上述的光学特性,以使全彩照相机30接收反射光为目的的该第1照明单元32a、32b宜采用由红色的led元件构成的光源,而能够更准确地判别被分选物即混合颗粒的种类。
48.另外,若上述的第1照明单元32a、32b、第2照明单元33a、33b和第3照明单元34分别使用如荧光灯那样的白色光源时,反射光与透射光的两成分加在一起的信息被取入至全彩照相机30,因此不易检测出特征性的受光量而有可能判别精度降低。
49.此外,在本实施方式中作为优选的例子,将第1照明单元32a、32b设定为红色,将第2照明单元33a、33b设定为绿色,将第3照明单元34设定为蓝色,但未必限定于此,也可以设为以下的表1的组合。
50.[表1]
[0051][0052]
接着,对上述的稻谷分选部3中的稻谷与糙米的判别方法进行说明。如上所述,作为第1照明单元32a、32b、第2照明单元33a、33b和第3照明单元34分别使用单色的光源,由此能够更准确地进行稻谷与糙米的判别,并且,也能够进行稻谷与糙米以外的异物的判别。
[0053]
即,糙米通过观察区域o时,如图3a、图3b所示,由于糙米比起稻谷,在光学上透射性佳,反射性低,因此全彩照相机30的红色成分(反射成分)的受光元件的受光量低,全彩照相机30的绿色成分(透射成分)的受光元件的受光量高。
[0054]
另一方面,稻谷通过观察区域o时,由于稻谷比起糙米,在光学上透射性不佳,反射性高,因此全彩照相机30的红色成分(反射成分)的受光元件的受光量高,全彩照相机30的绿色成分(透射成分)的受光元件的受光量低。此外,由于全彩照相机30的蓝色成分的受光量是糙米、稻谷皆是大小无太大差别,因此为大致固定值。将此表示于表2。
[0055]
[表2]
[0056][0057]
图4是用于执行上述的判别方法的流程图。在步骤1,根据全彩照相机30的蓝色成分的受光量,判别混合颗粒是否通过了观察区域o。在步骤2,确认全彩照相机30的绿色成分的受光量高于或低于预定的绿色成分阈值,由此判别是透射性高的糙米通过还是除此以外的稻谷或异物通过。接着,在步骤3,确认全彩照相机30的红色成分的受光量高于或低于预定的红色成分阈值,由此判别是稻谷通过还是除此以外的异物通过。
[0058]
此外,也可以在上述步骤2和步骤3中,计算出反射成分即红色成分的受光量与透射成分即绿色成分的受光量的比例(例如“反射成分/透射成分”的值),将该值大于预定阈值的值判别为稻谷,将小于该预定阈值的值判别为糙米。
[0059]
(其他实施方式)
[0060]
以上,对本发明的稻谷判别机的一实施方式进行了说明,但可进行各种变形。例如,在上述的实施方式中,作为受光单元使用了具有各色受光元件的全彩照相机30,但未必限定于此种装置,可以使用分别对应于红、绿、蓝的单色受光传感器。另外,作为受光单元也可以使用拍摄照相机,此时,只要进行所拍摄的图像的解析处理,挑出红色成分、绿色成分、蓝色成分各自的颜色成分即可。
[0061]
在上述的实施方式中,对将本发明的稻谷判别机应用于稻谷分选机3还有稻谷脱壳分选机1的方式进行了说明,也可以应用于混合颗粒的检查装置。
[0062]
图5是表示本发明的稻谷分选机的另一实施方式的示意图,将流下滑槽15形成为长尺状,在观察区域o附近的底面的一部分设有玻璃等透明材料40。由此,与以往的从流下滑槽15的下端排出混合颗粒并以自由落下状态流下的情况相比,不易在混合颗粒的颗粒产生空气阻力,且颗粒的姿势稳定,因此能够使混合颗粒的判别精度提高。此外,也可以设置缝隙状空间而取代设置上述透明材料40,并且,也可以用传送带构成流下滑槽15。
[0063]
图6是表示应用了本发明的稻谷分选机3的稻谷脱壳分选机1的另一实施方式的概略图。图6所示的稻谷脱壳分选机1中,作为稻谷脱壳部2可采用离心式(叶轮式)脱壳机来取代辊式脱壳机。此外,稻谷分选机3可采用带式来取代滑槽式(使用本实施方式的流下滑槽15的形式)。
[0064]
采用辊式脱壳机时,从稻谷分选机3的全彩照相机30的判别结果求出的脱壳率为85%以下时,(1)控制辊式脱壳机的辊间隙调节装置,控制成接近作为基准的脱壳率85~95%。即使实施辊间隙控制,经过一定时间后,仍不满足作为基准的上述脱壳率时,本次(2)有可能稻谷分选机3的流量过多,因此进行缩小流量的控制。即使经过(1)、(2),仍不满足作为基准的上述脱壳率时,判定为异常,可以对装置的管理者或操作员通知警告。
[0065]
采用离心式(叶轮式)脱壳机时,当从稻谷分选机3的全彩照相机30的判别结果求出的脱壳率为90%以下时,(1)控制离心式脱壳机的转速,控制成接近作为基准的脱壳率90~95%。即使实施转速控制,经过一定时间后,仍不满足作为基准的上述脱壳率时,本次(2)有可能稻谷分选机3的流量过多,因此进行缩小流量的控制。即使经过(1)、(2),仍不满足作为基准的上述脱壳率时,判定为异常,可以对装置的管理者或操作员通知警告。
[0066]
以上,对本发明的几个实施方式进行了说明,上述的发明的实施方式是用于容易理解本发明的实施方式,并非限定本发明。本发明在不脱离其宗旨下,可进行变更、改良,并且本发明可包含其均等物。另外,在可解决上述课题的至少一部分的范围或发挥效果的至少一部分的范围,可进行记载于请求专利保护的范围及说明书的各构成要素的组合或省略。
[0067]
符号说明
[0068]
1:稻谷脱壳分选机
[0069]
3:稻谷分选部(稻谷分选机)
[0070]
15:流下滑槽
[0071]
16:光学检查部(稻谷判别机)
[0072]
17:喷射部
[0073]
30:全彩照相机(受光单元)
[0074]
31:背景板
[0075]
32a、32b:第1照明单元
[0076]
33a、33b:第2照明单元
[0077]
34:第3照明单元。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。