一种基于pmsm矢量控制无人驾驶赛车转向机构
技术领域
1.本实用新型涉及汽车技术领域,具体涉及一种基于pmsm矢量控制无人驾驶赛车转向机构。
背景技术:
2.在人工智能与万物互联技术发展如火如荼的今天,无人驾驶技术正以始料未及的速度走入人们的生活。为了响应中国汽车行业的发展需求,由中国汽车工程学会承办的中国大学生无人驾驶方程式大赛(fsac)鼓励高校学子研究无人驾驶技术,在原有电动赛车的基础上添加感知设备和控制装置,实现赛车自主驾驶。其中,赛车转向系统的线控化改进是极其重要的关键技术。
3.fsac大赛规则要求无人驾驶赛车必须具备有人驾驶和无人驾驶两种转向模式,并能实现安全、便捷的模式转换以完成赛事不同的比赛项目。其中主要难点在于:1、实现无人、有人两种驾驶模式的切换,且互相没有运动干涉。2、满足赛车轻量化设计,结构尽量紧凑。
4.为满足上述要求,大连理工大学的韩小强等人曾提出“cn212099046u一种无人方程式赛车转向系统的自动和手动切换装置”的专利技术方案,该装置在传动方式上选择了齿轮传动,具有稳定的传动比,同时采用电磁铁作为离合器,可以基本实现有人、无人驾驶的模式切换。但是采用齿轮传动以及电磁铁装置也不可避免的使装置的整体结构相对复杂,布置难度加大,不利于赛车的轻量化设计。由于采用了齿轮传动方式,在驾驶模式切换的离合过程中可能出现卡顿,啮合不良的现象。
技术实现要素:
5.本实用新型的目的在于克服现有技术的缺点与不足,提供一种基于pmsm矢量控制无人驾驶赛车转向机构,通过pmsm矢量控制的伺服电机和控制伺服电机的电机控制器,以及转向机构与伺服电机之间的连接和布置以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种基于pmsm矢量控制无人驾驶赛车转向机构,包括电子控制单元和方向盘,还包括pmsm矢量控制的伺服电机和控制伺服电机的电机控制器,所述方向盘与转向输入轴相连,转向输入轴通过第一万向节驱动中间传动轴,中间传动轴通过第二万向节与转向输出轴相连,在输出齿轮保护壳中,转向输出轴上的齿轮与转向横拉杆上的齿条直齿啮合,从而驱动转向横拉杆作左右平移运动;所述伺服电机的电机输入端直接与转向输出轴固联;
8.优选的,所述伺服电机和电机控制器布置于输出齿轮保护壳前端;
9.优选的,所述电机控制器控制伺服电机的转矩和转速;
10.优选的,所述转向横拉杆左右两边设有限位块用于限制自由度,从而输出转向动作;
11.优选的,所述伺服电机通过电机支撑架进行支撑和固定;
12.优选的,所述电机控制器由转速控制器、电流控制器、svpwm模块和逆变器组成;
13.优选的,所述伺服电机在无人驾驶模式下通过转向输出轴上的齿轮带动转向横拉杆直接驱动赛车的转向动作,并通过实时的反馈控制回路,对赛车转角进行控制;
14.作为一种优选的方案,所述方向盘设有转向模式切换按钮,用于切换人工驾驶模式和无人驾驶模式。
15.本实用新型工作原理:
16.驾驶员按下转向切换按钮,键控系统会模拟一个电压信号传到电子控制单元ecu,由ecu进行决策并输出切换指令。
17.无人驾驶模式下,由电机控制器根据接收到的切换指令控制,可进行常规的伺服系统运转,由轨迹跟踪算法计算出转向的转角以及速率,实时发送转速信号和转矩信号给电机控制器,通过pmsm的矢量控制得到输入伺服电机的三相交流电信号,伺服电机通过转向输出轴上的齿轮带动转向横拉杆直接驱动赛车的转向动作,并通过实时的反馈控制回路,对赛车转角进行精确控制。
18.有人驾驶时模式下,采用传统的方向盘驱动转向输入轴通过万向节传输动力至中间传动轴,最后到转向输出轴,此过程中需要消除电机阻尼力的影响,通过转速传感器实时的采集转向输出轴的转速,转换为转速信号nref,通过转速控制器得到idref、iqref,转矩信号为电机的阻尼力以及机械摩擦阻力是一个定值,通过电流控制器得到ud、uq,经过反park变换,svpwm模块调制得到伺服电机需要的三相交流电信号,是伺服电机定子产生一个与电机转子旋转磁场转速相同的磁场,等效的抵消了摩擦阻力和消除了电机的阻尼力。相当于电机作用不存在,替代了机械离合装置。
19.与现有技术相比,本实用新型的有益效果为:
20.首先,本实用新型调整了转向传动轴的布置方向,使得传动路线在同一轴线内,同时取消了传统的传动机构和离合装置,使得整体结构大大简化,同时方便布置。其次,将伺服电机的电机输入端直接与转向输出轴固联,没有传动损失,传动过程更加稳定,有利于赛车的轻量化设计,有效避免了齿轮传动方式在驾驶模式切换的离合过程中可能出现卡顿和啮合不良现象。再之,将伺服电机和电机控制器布置于转向机构前端,结构简便,更加方便赛车空间布置。最后,本实用新型将电控系统代替传统机械离合,利用pmsm矢量控制模式的切换即可调整电机的状态,简洁高效的实现无人驾驶与有人驾驶模式的自由,转换模式切换更加高效灵活。
附图说明
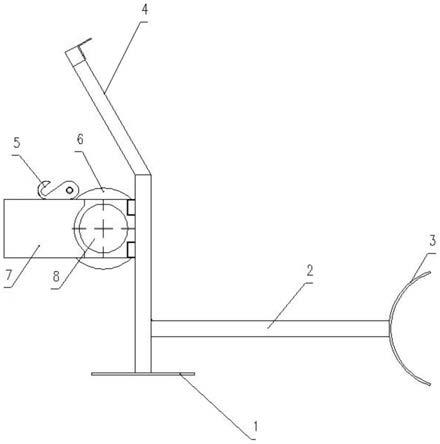
21.图1为本实用新型整体结构示意图;
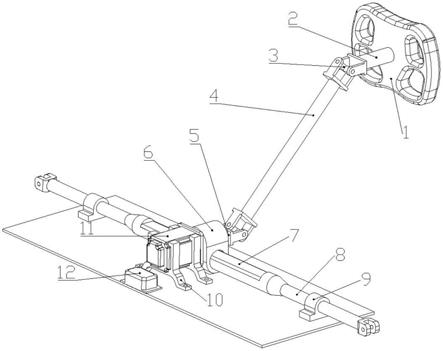
22.图2为本实用新型整体结构示意图;
23.图3为本实用新型pmsm矢量控制框图。
24.图中:1、方向盘;2、转向输入轴;3、第一万向节;4、中间传动轴;5、转向输出轴;6、输出齿轮保护壳;7、齿条;8、转向横拉杆;9、限位块;10、电机支撑架;11、伺服电机;12、电机控制器。
具体实施方式
25.下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
26.请参阅图1-2,本实用新型提供一种技术方案:
27.一种基于pmsm矢量控制无人驾驶赛车转向机构,包括电子控制单元和方向盘1,还包括pmsm矢量控制的伺服电机11和控制伺服电机11的电机控制器12,所述方向盘1与转向输入轴2相连,转向输入轴2通过第一万向节3驱动中间传动轴4,中间传动轴4通过第二万向节与转向输出轴5相连,在输出齿轮保护壳6中,转向输出轴5上的齿轮与转向横拉杆8上的齿条7直齿啮合,从而驱动转向横拉杆8作左右平移运动;所述伺服电机11的电机输入端直接与转向输出轴5固联;
28.本实用新型中,调整了转向传动轴的布置方向,使得传动路线在同一轴线内,同时取消了传统的传动机构和离合装置,使得整体结构大大简化,同时方便布置。其次,将伺服电机11的电机输入端直接与转向输出轴5固联,没有传动损失,传动过程更加稳定,有利于赛车的轻量化设计,有效避免了齿轮传动方式在驾驶模式切换的离合过程中可能出现卡顿和啮合不良现象。最后,本实用新型将电控系统代替传统机械离合,利用pmsm矢量控制模式的切换即可调整电机的状态,简洁高效的实现无人驾驶与有人驾驶模式的自由,转换模式切换更加高效灵活。
29.所述伺服电机11和电机控制器12布置于输出齿轮保护壳6前端;结构简便,更加方便赛车空间布置。
30.所述电机控制器12控制伺服电机11的转矩和转速;所述转向横拉杆8左右两边设有限位块9用于限制自由度,从而输出转向动作;所述伺服电机11通过电机支撑架10进行支撑和固定;所述电机控制器12由转速控制器、电流控制器、svpwm模块和逆变器组成;无人驾驶模式下,所述伺服电机11通过转向输出轴5上的齿轮带动转向横拉杆8直接驱动赛车的转向动作,并通过实时的反馈控制回路,对赛车转角进行控制;所述方向盘1设有转向模式切换按钮,用于切换人工驾驶模式和无人驾驶模式。
31.本实用新型的工作原理:
32.伺服电机11的pmsm矢量控制,通过坐标变换的方式将三相电流解耦,以控制其中一项来达到控制电机转矩的目的,解耦后的电机特性与直流电机相似,所以控制实现容易。
33.以下是永磁同步电机的数学模型:
34.三相交流瞬时电流表达式:
35.ia=imcosωt
36.ib=imcos(ωt-120
°
)
37.ic=imcos(ωt 120
°
)
38.因此,永磁同步电机的旋转磁场周期为旋转磁场的转速为永磁同步电机在三相静止坐标系下定子电压方程:
39.40.rs为电枢电阻,ψa、ψb、ψc分别为abc三相磁链,ia、ib、ic分别为其abc三相的相电流。
[0041][0042]
l
aa
、l
bb
、l
cc
为各相绕组自感,且大小相等,m
ab
等为绕组之间互感且均相等,ψf是永磁体磁链,θ为转子n极和a相轴线之间的夹角。
[0043]
交流电源频率电机定子绕组旋转磁场的转速与交流电源的频率有关。
[0044]
三项交流电通过数学方法将三相静止坐标系转换到d-q坐标系进行解耦的转换关系
[0045][0046]
三相静止坐标系下电机数学模型经过clark和park变换后,得到其在d-q坐标系下的数学模型:
[0047][0048][0049]
其中ud、uq为d-q轴电压,id、iq为d-q轴电流,ψd、ψq为d-q轴磁链,lq、ld为d-q轴电感,ωe为转动角速度,ψf为永磁体磁链,θ为转子n极和a相轴线之间的夹角。
[0050]
电机转矩表达式t=23p
niq
[id(l
d-lq) ψf],永磁同步电机转矩与id、iq有直接关系,通过调整id、iq即可调整电机的输出转矩。
[0051]
在自动驾驶模式下,所有的执行由电机控制器12和伺服电机11接管,通过轨迹跟踪算法得到的电机控制器12的输入量。如图3所示,输入转速信号nref通过转速控制器得到idref、iqref并接收转矩信号通过电流控制器得到ud、uq,进行反park变换由svpwm模块调制得到控制波形,控制逆变器的6个开关器件,使得直流电源信号逆变成三相交流电压控制伺服电机11,通过电流传感器、转速传感器得到电机的实时运行数据,并进行反馈控制,完成整个矢量控制过程。同时伺服电机11具有闭环反馈回路,可以实时的调整输入信号,减小控制误差,达到更精确的控制。
[0052]
在人工驾驶模式下,以方向盘1作为动力输入端,通过双十字节万向传动轴,将转矩传递给转向横拉杆8,此时,没用机械的离合装置,伺服电机11的转子会因转向输出轴5转动被迫转动,电机绕组线圈会产生感应电动势,形成一个阻碍转向输出轴5转动的阻尼力。根本原因是转子的被迫转动,定子绕组线圈磁通量发生变化。因此,想要消除磁通量变化产生的阻尼力,需要根据转速传感器检测到的转向输出轴5转速,通过电机控制器12输入电流信号,使得伺服电机11定子绕组线圈产生一个与转子旋转磁场相同角速度的磁场,即可消除电机的阻尼力。
[0053]
上述为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述内容的
限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。