技术特征:
1.一种车辆,包括:传感器;一个或多个处理器;以及存储器,其存储处理器可执行指令,所述指令在由所述一个或多个处理器执行时将所述车辆配置为:从所述传感器接收环境的传感器数据;至少部分地基于所述传感器数据,识别所述环境中第一位置处的对象;确定所述车辆在所述环境中可能采取的第一行动和第二行动;确定与所述第一行动相关联的第一对象轨迹、和与所述第二行动相关联的第二对象轨迹;至少部分地基于所述第一对象轨迹,确定与所述第一行动相关联的第一行动成本,其中,所述第一行动至少部分地基于第一安全成本、第一舒适性成本、第一进度成本或第一操作规则成本中的至少一个;至少部分地基于所述第二对象轨迹,确定与所述第二行动相关联的第二行动成本,其中,所述第二行动成本至少部分基于第二安全成本、第二舒适性成本、第二进度成本或第二操作规则成本中的至少一个;确定与所述第一行动相关联的所述第一行动成本低于与所述第二行动相关联的所述第二行动成本;以及至少部分地基于确定所述第一行动成本低于所述第二行动成本,至少部分地基于所述第一行动来控制所述车辆。2.根据权利要求1所述的车辆,其中:所述第一安全成本至少部分地基于与第一对象相关联的对象状态、或所述第一对象与所述车辆之间的相对状态的第一函数;所述第一舒适性成本至少部分地基于与所述第一对象相关联的所述对象状态、或所述第一对象与所述车辆之间的所述相对状态的第二函数;所述第一进度成本至少部分地基于所述对象的第一对象时间延迟;以及所述第一操作规则成本至少部分地基于与所述环境相关联的一个或多个规章。3.根据权利要求1或2所述的车辆,其中,所述指令进一步将所述车辆配置为:确定所述车辆在所述环境中可能采取的第三行动;确定与所述第三行动相关联的第三对象轨迹;确定与所述第三行动相关联的第三成本;确定所述第三成本大于阈值成本;以及从控制规划考虑中忽略与所述第三行动相关联的数据。4.根据权利要求1至3中任一项所述的车辆,其中,所述指令进一步将所述车辆配置为:至少部分地基于所述传感器数据,确定所述环境中的遮挡区域;利用机器学习技术,确定与在所述遮挡区域中操作的第二对象相关联的概率;确定所述概率高于阈值;以及确定与所述第二对象相关联的预测的对象轨迹,其中,确定所述第一行动成本和所述第二行动成本还至少部分地基于与所述第二对象
相关联的所述预测的对象轨迹。5.根据权利要求1至4中任一项所述的车辆,其中,至少部分地基于以下各项中的至少一项确定所述第一对象轨迹和所述第二对象轨迹:机器学习算法;所述环境的自上而下的表示;离散概率分布;时序逻辑公式;或者树形搜索方法。6.一种方法,包括:至少部分地基于传感器数据,确定环境中第一位置处的对象;确定用于车辆在所述环境中采取的候选行动;确定与所述候选行动相关联的对象轨迹;至少部分地基于所述对象轨迹和与所述行动相关联的所述车辆的车辆轨迹,确定与所述候选行动相关联的行动成本;以及至少部分地基于与所述候选行动相关联的所述行动成本来控制所述车辆。7.根据权利要求6所述的方法,其中,确定所述行动成本包括以下各项中的至少一项:确定与所述候选行动相关联的安全成本;至少部分地基于所述对象轨迹,确定与所述候选行动相关联的舒适性成本;至少部分地基于所述对象轨迹,确定与所述候选行动相关联的进度成本;或者确定与所述候选行动相关联的操作规则成本。8.根据权利要求6或7所述的方法,其中,所述行动成本包括与所述对象相关联的舒适性成本,所述舒适性成本至少部分地基于以下各项中的至少一项:所述对象的正加速度;所述对象的负加速度;或者所述对象的横向加速度。9.根据权利要求6至8中任一项所述的方法,其中,所述行动成本包括安全成本,所述安全成本至少部分基于以下各项中的至少一项:确定所述车辆的估计车辆位置与所述对象的估计对象位置之间的距离;确定在一段时间内所述车辆的估计位置和所述对象的估计位置之间交会的速率;或者确定所述车辆和所述对象之间碰撞的概率。10.根据权利要求6至9中任一项所述的方法,其中,所述候选行动是第一候选行动,并且其中,所述对象轨迹是第一对象轨迹,所述方法还包括:确定用于所述车辆在所述环境中采取的第二候选行动;至少部分地基于所述第二候选行动,确定第二对象轨迹;至少部分地基于所述第二对象轨迹,确定与所述第二候选行动相关联的安全成本;确定所述安全成本大于阈值安全成本;以及至少部分地基于确定所述安全成本大于所述阈值安全成本,在控制规划考虑中排除与所述第二行动相关联的数据。11.根据权利要求6至10中任一项所述的方法,还包括:
确定所述车辆和所述对象的第一估计状态,其中,所述第一估计状态包括所述车辆在第一时间的第一估计位置、和所述对象在所述第一时间的第一估计位置;确定所述车辆和所述对象的第二估计状态,其中,所述第二估计状态包括所述车辆在第二时间的第二估计位置、和所述对象在所述第二时间的第二估计位置;以及确定与所述第一估计状态相关联的第一成本、和与所述第二估计状态相关联的第二成本,其中,确定所述行动成本至少部分地基于所述第一成本和所述第二成本。12.根据权利要求6至11中任一项所述的方法,其中:所述候选行动是第一候选行动;所述行动成本是第一行动成本;以及至少部分地基于所述第一行动成本来控制所述车辆包括:确定用于所述车辆在所述环境中采取的第二候选行动;至少部分地基于所述第二候选行动来确定第二对象轨迹;至少部分地基于所述第二对象轨迹,确定与所述第二候选行动相关联的第二行动成本;以及确定所述第一行动成本小于所述第二行动成本;以及至少部分地基于所述第一行动小于第二行动,来控制所述车辆遵循所述第一行动。13.根据权利要求6至12中任一项所述的方法,其中,所述对象是第一对象,所述方法还包括:至少部分地基于所述传感器数据,确定所述环境中的遮挡区域,其中,确定与所述候选行动相关联的所述行动成本至少部分地基于所述遮挡区域。14.根据权利要求13所述的方法,进一步包括:至少部分地基于以下各项中的至少一项来确定第二对象正在所述遮挡区域中操作:机器学习技术;与所述遮挡区域相关联的路段;与所述遮挡区域相关联的多个车道;所述遮挡区域的尺寸;一天中的时间;或者一周中的一天。15.一种存储指令的非暂时性计算机可读介质,所述指令在被执行时使一个或多个处理器执行根据权利要求6-14中任一项所述的方法。
技术总结
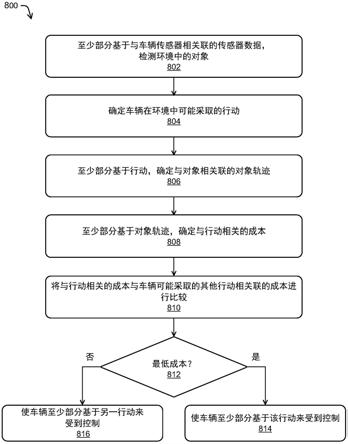
车辆计算系统可以实施用于基于与行动相关联的成本来确定车辆要采取的行动的技术。该成本可以部分地基于行动对在环境中操作的对象(例如,另一辆车、骑自行车的人、行人等)的影响。车辆计算系统可以基于传感器数据检测对象,以及基于对象对执行行动的车辆的预测反应来确定对象轨迹。车辆计算系统基于行动和/或预测的对象轨迹,可以确定与关于车辆可能采取的每个行动的安全性、舒适性、进度和/或操作规则相关联的成本。在一些示例中,可以为车辆选择最低成本的行动来执行。择最低成本的行动来执行。择最低成本的行动来执行。
技术研发人员:T
受保护的技术使用者:祖克斯有限公司
技术研发日:2020.08.12
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。