技术特征:
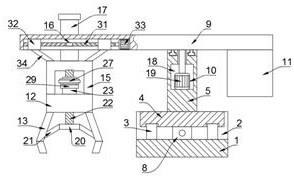
1.一种重工焊接机器人回转抓取机构,包括支撑机构,其特征在于,支撑机构包底座(1),所述底座(1)的上端前后两侧均固定连接有竖板(2),两块所述竖板(2)之间固定安装有滑轨(3),所述滑轨(3)上滑动连接有底板(4),所述底板(4)的上端固定连接有柱体(5),所述底座(1)上设有用于对底板(4)进行移动的移动机构(6),所述移动机构(6)包括第一螺纹杆(7),所述第一螺纹杆(7)的两端分别与两块竖板(2)转动连接,所述第一螺纹杆(7)外螺纹套设有移动块(8),所述移动块(8)与底座(1)滑动连接,所述移动块(8)的上端与底板(4)固定连接,其中一块所述竖板(2)的侧壁上固定连接有第四电机(37),所述第四电机(37)的驱动轴转动贯穿竖板(2)并与第一螺纹杆(7)同轴固定连接。2.根据权利要求1所述的一种重工焊接机器人回转抓取机构,其特征在于,还包括抓取机构,所述抓取机构包括横板(9),所述横板(9)的下端与柱体(5)的上端转动连接,所述柱体(5)内设有用于对横板(9)进行转动的转动机构(10),所述横板(9)的下端右侧固定安装有配重块(11),所述横板(9)的下方左侧设有升降板(12),所述升降板(12)的下端安装有两个抓手(13),所述升降板(12)上设有用于对两个抓手(13)进行调节的调节机构(14),所述升降板(12)的上端固定连接有u型板(15),所述横板(9)上设有用于对u型板(15)进行升降的升降机构(16),所述u型板(15)的上端固定连接有两块限位块(17),两块所述限位块(17)均滑动贯穿横板(9)设置。3.根据权利要求2所述的一种重工焊接机器人回转抓取机构,其特征在于,所述转动机构(10)包括设置在柱体(5)内的空腔(18),所述空腔(18)内固定安装有第一电机(19),所述第一电机(19)的驱动轴转动贯穿柱体(5)并与横板(9)的下端固定连接。4.根据权利要求2所述的一种重工焊接机器人回转抓取机构,其特征在于,所述调节机构(14)包括设置在升降板(12)下方的调节板(20),所述调节板(20)的前后两侧均转动连接有两块转动板(21),四块所述转动板(21)远离调节板(20)的一端分别与两个抓手(13)内壁转动连接,所述调节板(20)的上端固定连接有两根第二螺纹杆(22),两根所述第二螺纹杆(22)的上端均滑动贯穿升降板(12)设置,两根所述第二螺纹杆(22)外均螺纹套设有螺纹套筒(23),两个所述螺纹套筒(23)之间通过传动机构(24)传动连接,所述升降板(12)的上端固定连接有第二电机(25),所述第二电机(25)的驱动轴与其中一个螺纹套筒(23)之间通过齿轮组(26)传动连接。5.根据权利要求4所述的一种重工焊接机器人回转抓取机构,其特征在于,所述传动机构(24)包括两个皮带轮(27),两个所述皮带轮(27)之间通过皮带传动连接,两个所述皮带轮(27)分别与两根螺纹套筒(23)同轴固定连接。6.根据权利要求4所述的一种重工焊接机器人回转抓取机构,其特征在于,所述齿轮组(26)包括相互啮合的齿轮(28)和齿盘(29),所述齿轮(28)与第二电机(25)的驱动轴同轴固定连接,所述齿盘(29)与螺纹套筒(23)同轴固定连接。7.根据权利要求2所述的一种重工焊接机器人回转抓取机构,其特征在于,所述升降机构(16)包括设置在横板(9)下端的升降槽(30),所述升降槽(30)内转动连接有双向螺纹杆(31),所述双向螺纹杆(31)外螺纹套设有两块螺纹块(32),两块所述螺纹块(32)均与升降槽(30)内侧壁滑动连接,所述升降槽(30)内固定连接有第三电机(33),所述第三电机(33)的驱动轴与双向螺纹杆(31)同轴固定连接,两块所述螺纹块(32)的下端均转动连接有偏转板(34),两块所述偏转板(34)的下端均与u型板(15)的上端转动连接。
8.根据权利要求7所述的一种重工焊接机器人回转抓取机构,其特征在于,两块所述螺纹块(32)上均贯穿设有与双向螺纹杆(31)相匹配的螺纹孔,两个螺纹孔内的螺纹旋向相反。9.根据权利要求2所述的一种重工焊接机器人回转抓取机构,其特征在于,所述柱体(5)的上端设有t型环槽(35),所述t型环槽(35)内转动连接有t型环块(36),所述t型环块(36)的上端与横板(9)的下端固定连接。
技术总结
本发明公开了一种重工焊接机器人回转抓取机构,包括支撑机构,支撑机构包底座,所述底座的上端前后两侧均固定连接有竖板,两块所述竖板之间固定安装有滑轨,所述滑轨上滑动连接有底板,所述底板的上端固定连接有柱体,所述底座上设有用于对底板进行移动的移动机构。本发明可以对较远的工件进行抓取,使用较为方便,且对工件多点抓取,抓取的稳定性较好。抓取的稳定性较好。抓取的稳定性较好。
技术研发人员:孙亚楠 韩志洁 张锡荣
受保护的技术使用者:山东交通职业学院
技术研发日:2022.01.10
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。