1.本发明涉及苗木种植设备,尤其是涉及应用于自动化植苗设备的一种自动插苗装置。
背景技术:
2.植树造林对于生态环境建设极为重要,不仅可使水土得到保持,从而减轻洪涝灾害的损失,而且绿色植物还被称为“天然除尘器”、“氧气制造厂”,有利于清除空气污染,实现区域自动调温。
3.尤其是,植树造林在治理沙化耕地和沙漠,控制水土流失,防风固沙和增加土壤蓄水能力等方面有显著功效,进而大大改善生态环境,由此所产生的直接经济效益和间接经济效益巨大。但是,在植树过程中,特别是批量化大面积的植树造林,当苗木种植坑挖掘形成后,就需要及时向苗木种植坑中进行插苗作业;如果完全依靠人工进行插苗作业,不仅劳动强度大,而且插苗作业效率低下。对于沙漠地区的植树造林作业,虽然沙漠地区的沙土质土壤比较松散,但是,沙漠地区缺水,年降水量也小,为了保证树苗的成活率,不仅植苗用的苗木种植坑需要挖掘到一定的土壤含水深度,而且同一个苗木种植坑通常需要插苗2棵,这无疑进一步增加人工插苗作业的劳动强度,且降低了插苗作业效率。
技术实现要素:
4.本发明要解决的技术问题是:针对现有技术存在的问题,提供一种自动插苗装置,降低插苗作业的劳动强度,提高插苗作业效率。
5.本发明要解决的技术问题采用以下技术方案来实现:一种自动插苗装置,包括落苗机构、接苗架及其驱动机构,所述的接苗架驱动机构包括接苗架转动机构和接苗架平动机构;在进行插苗作业时,所述的接苗架接收到待植苗木后,先通过接苗架转动机构将接苗架上的待植苗木推送至竖直状态,再通过接苗架平动机构将处于竖直状态的待植苗木推送至落苗机构,最后通过落苗机构将接苗架上的待植苗木输出到苗木种植坑。
6.优选地,所述的落苗机构包括限位板,在限位板上形成落苗口,所述的接苗架平动机构驱动限位板直线运动。
7.优选地,所述的限位板与落苗架固定连接,且限位板与落苗架共同形成l形结构件。
8.优选地,所述的限位板与落苗板形成相对滑动的活动连接结构,所述的落苗板与落苗板动作机构连接,所述的落苗板动作机构通过驱动落苗板相对于限位板滑动来使得落苗口打开或者关闭。
9.优选地,所述的落苗板动作机构包括电磁阀,所述的限位板上开设条形导槽,所述电磁阀的动作输出端通过导滑销与落苗板连接,所述的导滑销与条形导槽之间形成滑动配合结构,所述的电磁阀通过驱动落苗板相对于限位板滑动来使得落苗口打开或者关闭。
10.优选地,所述的落苗板动作机构包括电磁阀,所述的限位板上开设条形导槽,所述
的落苗板设置两块,且分别位于落苗口的相对两侧,每一块落苗板分别与独立的导滑销连接;所述电磁阀的本体部与其中一块落苗板对应的导滑销连接,电磁阀的动作输出端与另一块落苗板对应的导滑销连接;所述的导滑销分别与对应的条形导槽之间形成滑动配合结构,所述的电磁阀通过驱动两块落苗板之间产生相对运动来使落苗口打开或者关闭。
11.优选地,所述的接苗架转动机构包括电动推杆和接苗底座,所述电动推杆的动作输出端与接苗底座之间形成相对转动的活动连接结构,所述的接苗架与接苗底座之间形成可分离的活动连接结构,所述的电动推杆驱动接苗底座转动时,所述的接苗底座带动接苗架同步转动。
12.优选地,所述的接苗底座上安装第二电磁铁,所述的接苗架通过第二电磁铁与接苗底座之间形成可分离的活动连接结构。
13.优选地,所述的接苗架平动机构包括第二丝杠和第二滑座,所述的第二丝杠与第二滑座之间形成丝杆传动机构,所述的接苗架与第二滑座之间形成可分离的活动连接结构;当接苗架处于竖直状态、且与第二滑座连接到位时,所述的第二滑座将处于竖直状态的接苗架水平推送至落苗机构。
14.优选地,所述的第二滑座上安装第一电磁铁,所述的接苗架通过第一电磁铁与第二滑座之间形成可分离的活动连接结构。
15.与现有技术相比,本发明的有益效果是:采用本发明进行插苗作业时,当接苗架接收到待植苗木后,先通过接苗架转动机构将接苗架上的待植苗木推送至竖直状态,再通过接苗架平动机构将处于竖直状态的待植苗木推送至落苗机构,最后通过落苗机构将接苗架上的待植苗木输出到苗木种植坑,从而使处于竖直状态的待植苗木直接落入到苗木种植坑,完成插苗作业。该插苗作业过程无需人工参与,因此,极大地降低了插苗作业的劳动强度,并提高了插苗作业效率,尤其适合于大批量的插苗作业。
附图说明
16.图1为自动化植苗设备的总装配图(轴测图)。
17.图2为自动化植苗设备的总装配图(主视图)。
18.图3为分苗装置的轴测图。
19.图4为图3中a处的局部放大图。
20.图5为图3所示分苗装置的主视图。
21.图6为图5中b处的局部放大图。
22.图7为图3所示的分苗装置的减速传动系统图(轴测图)。
23.图8为图7所示的分苗装置的减速传动系统图(右视图)。
24.图9为让位钻孔装置的主视图。
25.图10为让位钻孔装置的侧视图。
26.图11为图10中c处的局部放大图。
27.图12为图10中限位滚轮机构的轴测图(正面,实施方式1)。
28.图13为图10中限位滚轮机构的轴测图(背面,实施方式1)。
29.图14为图10中限位滚轮机构的内部构造图(实施方式1)。
30.图15为图14所示的限位滚轮机构的主视图(实施方式1)。
31.图16为图10中限位滚轮机构的侧视图(实施方式2)。
32.图17为图16所示的限位滚轮机构的内部构造图(右侧的转动臂被隐藏,实施方式2)。
33.图18为图16所示的限位滚轮机构的内部构造图(主视图,实施方式2)。
34.图19为图18中d-d向的剖视图。
35.图20为本发明一种插苗装置的轴测图(正视,苗木处于水平状态)。
36.图21为本发明一种插苗装置的轴测图(侧视,苗木处于水平状态)。
37.图22为图20所示的插苗装置的正视图。
38.图23为图20所示的插苗装置的俯视图。
39.图24为本发明一种插苗装置的轴测图(苗木处于竖直状态)。
40.图25为图24所示的插苗装置的正视图。
41.图26为本发明一种插苗装置的轴测图(正视,苗木处于插苗状态)。
42.图27为本发明一种插苗装置的轴测图(仰视,苗木处于插苗状态)。
43.图28为图26所示的插苗装置的正视图。
44.图29为图20中落苗机构的轴测图(落苗板处于闭合状态)。
45.图30为图20中落苗机构的轴测图(落苗板处于张开状态)。
46.图31为图29或者图30所示的落苗机构的正视图。
47.图32为填埋装置的轴测图。
48.图33为图32所示的填埋装置的主视图。
49.图34为图32中填土机构的轴测图。
50.图35为图32中填土机构的侧视图。
51.图36为图35中e-e向的剖视图。
52.图37为图32中碾压机构的轴测图。
53.图38为图32中碾压机构的侧视图。
54.图39为图37或者图38所示的碾压机构的主视图。
55.图中标记:1-脚轮,2-机架,3-分苗装置,4-让位钻孔装置,5-插苗装置,6-填埋装置,301-分苗传动轴,302-分苗箱,303-分苗电机,304-导滑板,305-前侧板,306-第一同步带,307-缓冲板,308-后侧板,309-第一同步带轮,310-第二同步带轮,311-第一传动轴,312-拨苗轮,313-分散支架,314-第二同步带,315-第三同步带轮,316-基座,317-第二传动轴,318-曲柄,319-导滑轨,320-推苗板,321-推苗连杆,322-滑动座,323-第四同步带轮,324-第一扭簧,401-让位电机,402-第一丝杠,403-第一滑座,404-让位滑轨,405-第一底座,406-钻杆,407-承轨座,408-变位导轨,409-调节滚轮,410-固定滚轮,411-钻孔电机,412-轴承,413-滑动安装座,414-销轴,415-销轴座,416-转动臂,417-弹性皮筋,418-限位卡槽,419-第二扭簧,501-第一电磁铁,502-电动推杆,503-接苗底座,504-接苗架,505-落苗架,506-第二电磁铁,507-支座,508-电磁铁吸片,509-第二滑座,510-落苗板,511-第二底座,512-限位板,513-电磁阀,514-待植苗木,515-落苗电机,516-第二丝杠,517-转动座,518-导滑销,519-条形导槽,520-落苗口,601-填埋碾轮,602-堆沙犁刀,603-第一连杆,604-犁刀滚轮,605-第二连杆,606-第一夹板,607-第三连杆,608-碾轮支架,609-第二夹板,610-第三扭簧,611-第四扭簧。
具体实施方式
56.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明进行详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
57.如图1、图2所示的自动化植苗设备,主要包括机架2、分苗装置3、让位钻孔装置4以及插苗装置5和填埋装置6,所述的填埋装置6设置在机架2的底部,且机架2的底部安装脚轮1。如图3、图5所示,所述的分苗装置3包括分苗箱302、拨苗轮312及其驱动机构和推苗机构,所述的分苗箱302固定在机架2上,在分苗箱302的一侧底部设置出苗口,所述的拨苗轮312设置在出苗口的输出端。所述的推苗机构安装在基座316上,且推苗机构包括推苗板320及其驱动机构,所述的推苗板320在其驱动机构的作用下相对于基座316形成水平往复直线运动。具体地,如图7、图8所示,
58.所述推苗板320的驱动机构包括曲柄318、推苗连杆321和滑动座322,所述推苗连杆321的相对两端分别与曲柄318、滑动座322形成相对转动的活动连接结构,所述的推苗板320与滑动座322固定连接,所述的曲柄318在转动过程中通过推苗连杆321驱动滑动座322相对于基座316作水平往复直线运动。进一步地,所述的滑动座322与导滑轨319之间形成相对滑动的活动连接结构,所述的导滑轨319与基座316固定连接,以保证滑动座322相对于基座316作水平往复直线运动的稳定性和可靠性。所述的曲柄318与拨苗轮312之间设置二级减速传动机构,所述的二级减速传动机构包括第一同步带轮309、第二同步带轮310以及第三同步带轮315和第四同步带轮323,所述的第一同步带轮309与分苗传动轴301固定连接,所述的第二同步带轮310、第三同步带轮315分别与第一传动轴311固定连接,所述的第四同步带轮323与第二传动轴317固定连接,所述的第一同步带轮309与第二同步带轮310之间通过第一同步带306形成第一级减速传动机构,所述的第三同步带轮315与第四同步带轮323之间通过第二同步带314形成第二级减速传动机构。
59.所述的拨苗轮312与分苗传动轴301固定连接,所述的分苗传动轴301通过分苗电机303驱动;所述的曲柄318与第二传动轴317固定连接。当分苗装置3进行分苗作业时,所述的分苗电机303通过分苗传动轴301来驱动拨苗轮312相对于分苗箱302转动,并利用拨苗轮312的转动将分苗箱302中的待植苗木通过出苗口依次输出到推苗机构上。由于分苗箱302中的待植苗木是依靠自身重力下降,通过拨苗轮312的逆时针转动,还有助于防止待植苗木发生卡滞。为了进一步防止分苗箱302中的待植苗木在输出过程中因发生堆积甚至卡滞而导致出苗口阻塞,可以将分苗箱302与分散支架313固定连接,所述的分散支架313为圆弧形结构件,且圆弧部分向分苗箱302内腔凸出,所述的拨苗轮312设计成齿轮形结构,如图3所示。所述分苗传动轴301的转动经过二级减速传动机构减速处理后输出到曲柄318,所述的曲柄318在转动过程中又通过推苗连杆321驱动滑动座322相对于基座316作水平往复直线运动,从而可以通过推苗机构将基座316接收到的待植苗木以水平状态输出。
60.所述的推苗机构将待植苗木以水平状态输出到插苗装置5上。为了确保待植苗木以水平状态逐批输出,所述的拨苗轮312优选采用齿轮形结构,同时,也可以在分苗箱302的出苗口的下方分别设置前侧板305和后侧板308,所述的前侧板305与后侧板308相对设置,且在前侧板305与后侧板308之间形成落苗整形通道,如图3、图4所示,以使推苗机构将待植苗木以水平状态输出到落苗整形通道中。通过落苗整形通道进行整形处理后的待植苗木,
再落入到插苗装置5上。为了减轻待植苗木对插苗装置5的冲击,可以增加设置导滑板304,所述的导滑板304与机架2固定连接,所述的导滑板304相对于水平面倾斜设置,如图3所示,所述的待植苗木先是下落到导滑板304的水平部分,然后顺着导滑板304的倾斜面部分滑落。进一步地,可以将前侧板305通过第一扭簧324与缓冲板307连接,并使得落苗整形通道中的待植苗木在推开缓冲板307后流出落苗整形通道,如图5、图6所示。
61.所述的让位钻孔装置4的构造如图9、图10、图11所示,主要包括钻杆406、钻杆旋转驱动机构和钻杆升降驱动机构,所述的钻杆旋转驱动机构包括钻孔电机411,所述的钻杆406与钻孔电机411的动作输出端连接,且由钻孔电机411驱动钻杆406转动;所述的钻孔电机411安装在滑动安装座413上,通常,所述的滑动安装座413可以通过让位滑轨404与承轨座407连接,所述的滑动安装座413与让位滑轨404之间形成相对滑动的活动连接结构,如图11所示。所述的钻杆升降驱动机构安装在第一底座405上,主要包括让位电机401、第一丝杠402和第一滑座403,所述的第一滑座403与承轨座407固定连接,所述的第一丝杠402与第一滑座403之间形成丝杆传动机构。
62.在进行钻孔作业时,所述的让位电机401驱动第一丝杠402相对于第一底座405转动,所述的第一丝杠402驱动第一滑座403相对于第一底座405作升降运动,通过第一滑座403带动承轨座407作同步升降运动,所述的承轨座407带动钻杆406作同步升降运动,所述的钻杆406通过钻孔电机411驱动而相对于承轨座407转动,所述钻杆406的旋转动作与升降动作共同形成苗木种植坑。
63.为了避免对插苗装置5的插苗作业产生干涉,可以增加设置限位滚轮机构和变位导轨408。所述限位滚轮机构的构造如图11、图12所示,主要包括销轴座415,在销轴座415上分别设置调节滚轮409和固定滚轮410,所述的调节滚轮409、固定滚轮410分别与变位导轨408两侧的卡槽相配合,且调节滚轮409与固定滚轮410之间以夹持状态夹持住变位导轨408;通常,所述的调节滚轮409、固定滚轮410分别设置2个,且2个调节滚轮409位于变位导轨408的同一侧,2个固定滚轮410位于变位导轨408的另一侧。如图9、图11所示,所述的变位导轨408呈倒l形结构,所述的销轴座415通过销轴414与轴承412连接,所述的轴承412与滑动安装座413固定连接,所述的滑动安装座413安装在承轨座407上,所述的钻杆升降驱动机构通过销轴座415带动调节滚轮409、固定滚轮410沿着变位导轨408运动。
64.采用上述的结构设计,当钻杆406完成苗木种植坑的挖掘作业后,钻杆406将先沿着变位导轨408的竖直段上升,然后沿着变位导轨408的弯曲段运动至复位状态,从而使得钻杆406得以横向让位并移开苗木种植坑的正上方,以便后续的插苗装置5进行插苗作业。如果钻杆406仅仅是单纯的竖直方向上移开苗木种植坑,则第一丝杠402驱动第一滑座403的升降运动行程将至少需要满足两棵待植苗木的高度,从而导致让位钻孔装置4的总体高度将相应增加,这不仅增加了设备占用空间,而且会导致总体制造成本的增加。
65.为了保证和提高让位钻孔装置4的工作可靠性,提高苗木种植坑的钻孔质量,可以将调节滚轮409通过转动臂416与销轴座415连接,且转动臂416与销轴座415之间形成相对转动的活动连接结构,在转动臂416与销轴座415之间设置弹性皮筋417。通常,在转动臂416、销轴座415上分别开设限位卡槽418,所述的弹性皮筋417通过限位卡槽418进行限位,如图13、图14、图15所示。除此之外,还可以将调节滚轮409通过转动臂416与销轴座415连接,且转动臂416与销轴座415之间形成相对转动的活动连接结构,在转动臂416与销轴座
415之间设置第二扭簧419,如图16、图17、图18、图19所示。通过设置弹性皮筋417或者第二扭簧419,可以使得调节滚轮409、固定滚轮410之间以弹性夹持状态夹持住变位导轨408,从而确保调节滚轮409与变位导轨408之间、固定滚轮410与变位导轨408之间的接触可靠性,有利于限位滚轮机构工作中的自动调节,延长其工作寿命。
66.所述的让位钻孔装置4的工作过程是:当第一滑座403处于上极限位置时,滑动安装座413通过承轨座407处于变位导轨408右极限位置,如图9、图10所示。当让位电机401驱动第一丝杠402转动时,所述的第一丝杠402驱动第一滑座403向下运动,并由第一滑座403带动承轨座407同步向下运动,所述的承轨座407带动滑动安装座413也同步向下运动。在此过程中,所述的第一滑座403通过承轨座407、让位滑轨404对滑动安装座413产生向下方向的作用力,同时,通过调节滚轮409、固定滚轮410与变位导轨408之间的相互作用对滑动安装座413产生横向作用力,从而驱使滑动安装座413、限位滚轮机构、钻孔电机411整体沿着变位导轨408进行变位移动。当限位滚轮机构通过变位导轨408上部的弧形轨道部分时,可以实现钻杆406的横向变位和部分纵向变位,当限位滚轮机构通过变位导轨408下部的直线型轨道部分时,可以实现钻杆406的纵向变位,从而可以提供钻孔所需的竖直向下的作用力;在此过程中,所述的钻孔电机411驱动钻杆406转动,同时钻杆406也由承轨座407带动沿竖直方向运动,所述钻杆406的旋转动作与竖直方向的升降动作共同实现钻孔功能,直至形成苗木种植坑。
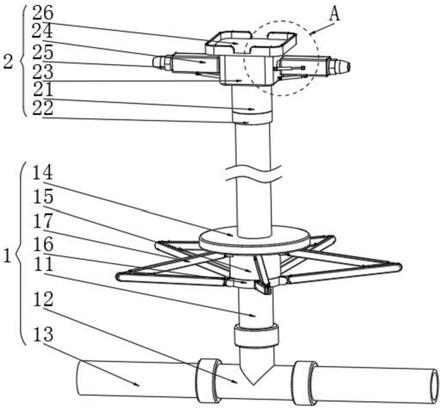
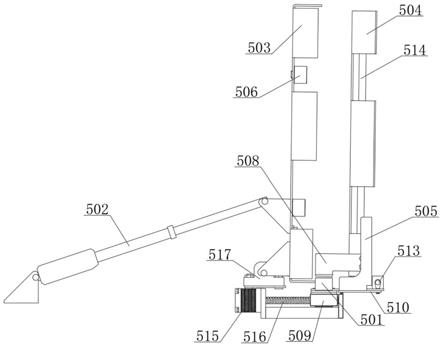
67.如图20、图21、图22和图23所示,所述的插苗装置5主要包括落苗机构、接苗架504及其驱动机构,所述的接苗架驱动机构包括接苗架转动机构和接苗架平动机构,所述的接苗架转动机构先驱动接苗架504转动至处于竖直状态,再通过接苗架平动机构将处于竖直状态的接苗架504(连同待植苗木)推送至落苗机构,最后通过落苗机构输出接苗架504上的待植苗木。具体地,
68.所述的落苗机构包括限位板512,在限位板512上形成落苗口520,所述的接苗架平动机构驱动限位板512作直线运动。所述的限位板512与落苗架505固定连接,通常,所述的限位板512与落苗架505之间形成一体化成型结构,且限位板512与落苗架505共同形成l形结构件。采用这样的结构设计,在植苗作业中,可以利用落苗架505对待植苗木进行辅助扶持,以尽量使得待植苗木能够以竖直状态通过落苗口520落入到苗木种植坑中。
69.为了更好地控制落苗架505上的待植苗木以竖直状态通过落苗口520落入到苗木种植坑中,如图29、图30、图31所示,可以使限位板512与落苗板510之间形成相对滑动的活动连接结构,所述的落苗板510与落苗板动作机构连接,所述的落苗板动作机构通过驱动落苗板510相对于限位板512滑动来使得落苗口520打开或者关闭。其中,所述的落苗板动作机构优选采用电磁阀513,在限位板512上开设条形导槽519,所述电磁阀513的动作输出端通过导滑销518与落苗板510连接,所述的导滑销518与条形导槽519之间形成滑动配合结构,所述的电磁阀513通过驱动落苗板510相对于限位板512滑动来使得落苗口520打开或者关闭。其中,图29所示为落苗口520处于关闭状态,图30所示为落苗口520处于打开状态。
70.所述的接苗架转动机构主要包括电动推杆502和接苗底座503,所述电动推杆502的尾端通过支座507与机架2固定连接,如图1所示,电动推杆502的动作输出端则与接苗底座503之间形成相对转动的活动连接结构,所述的接苗架504与接苗底座503之间形成可分离的活动连接结构。通常,可以在接苗底座503上安装第二电磁铁506,所述的接苗架504通
过第二电磁铁506与接苗底座503之间形成可分离的活动连接结构。所述的电动推杆502驱动接苗底座503转动时,所述的接苗底座503带动接苗架504同步转动。
71.所述的接苗架平动机构安装在第二底座511上,包括第二丝杠516和第二滑座509,所述的第二丝杠516通过落苗电机515驱动,所述的第二丝杠516与第二滑座509之间形成丝杆传动机构,同时,所述的第二滑座509通过转动座517与接苗底座503之间形成相对转动的活动连接结构。所述的接苗架504与第二滑座509之间形成可分离的活动连接结构。通常,可以在第二滑座509上安装第一电磁铁501,所述的接苗架504通过第一电磁铁501与第二滑座509之间形成可分离的活动连接结构。进一步地,所述的接苗架504与电磁铁吸片508固定连接,所述的第一电磁铁501与电磁铁吸片508之间形成可分离的活动连接结构。当接苗架504处于竖直状态、且与第二滑座509连接到位时,所述的第二滑座509将处于竖直状态的接苗架504水平推送至落苗机构。
72.所述的插苗装置5在进行插苗作业时,如图22所示,所述的电动推杆502使接苗架504处于水平状态,当接苗架504接收到待植苗木514后,所述的第二电磁铁506通电,所述的接苗架504通过第二电磁铁506与接苗底座503之间固定连接成一体。首先,通过电动推杆502驱动接苗底座503转动,所述的接苗底座503带动接苗架504同步转动,直至接苗架504转动至处于竖直状态,此时,所述的第一电磁铁501通电,以便接苗架504可以通过电磁铁吸片508与第一电磁铁501之间的电磁吸引力而保持在竖直状态,所述接苗架504上的待植苗木514也同时处于竖直状态,如图24、图25所示。之后,所述的第二电磁铁506失电,以便接苗架504与接苗底座503之间可以分离。如图26、图27、图28所示,启动落苗电机515,通过第二丝杠516驱动第二滑座509向前移动,直至第二滑座509带动第一电磁铁501和接苗架504同步运动到插苗位置后停止。接下来,所述的电磁阀513启动,且通过电磁阀513驱动落苗板510相对于限位板512滑动,直至落苗口520处于打开状态,此时,处于接苗架504上的待植苗木514即可通过落苗口520落入到苗木种植坑中。然后,所述的电磁阀513再次启动,并通过电磁阀513驱动落苗板510相对于限位板512滑动,直至落苗口520处于闭合状态。再次启动落苗电机515,通过第二丝杠516驱动第二滑座509向后移动,当接苗架504运动到与第二电磁铁506重新接触时,所述的第二电磁铁506通电,而第一电磁铁501则断电,此时,所述的接苗架504与接苗底座503即可通过第二电磁铁506连接成一体。启动电动推杆502,通过电动推杆502驱动接苗底座503反向转动,所述的接苗底座503带动接苗架504也同步反向转动,直至接苗架504反向转动至处于水平状态,以便为下一次的接苗作业做准备。
73.如图32、图33所示,所述的填埋装置6包括填土机构和碾压机构,所述的填土机构包括堆沙犁刀602,所述的堆沙犁刀602与第一连杆603连接,所述的第一连杆603与犁刀滚轮604之间形成相对转动的活动连接结构,另外,所述的第一连杆603分别与第二连杆605、第三连杆607连接,所述的第二连杆605、第三连杆607分别与第一夹板606连接,所述的第一连杆603、第二连杆605、第三连杆607、第一夹板606之间形成平行四边形机构,在第二连杆605与第一夹板606之间、在第三连杆607与第一夹板606之间分别设置第四扭簧611,如图34、图35、图36所示。在填土机构工作过程中,如图33所示,所述堆沙犁刀602的尖端部前行,所述的第四扭簧611使得第二连杆605与第一夹板606之间存在一定张角和作用力,也使得第三连杆607与第一夹板606之间存在一定张角和作用力,从而使得堆沙犁刀602可以始终保持向下挤压的趋势,以便堆沙犁刀602在工作过程中得以最大限度地推送沙土,从而有助
于提高填土作业效率。
74.所述的碾压机构包括填埋碾轮601,所述的填埋碾轮601通过碾轮支架608与第二夹板609连接,在碾轮支架608与第二夹板609之间设置第三扭簧610,如图37、图38、图39所示。在碾压机构工作过程中,如图33所示,所述堆沙犁刀602的尖端部前行,所述的第三扭簧610使得碾轮支架608与第二夹板609之间存在一定张角和作用力,从而使得填埋碾轮601可以始终保持向下碾压的趋势,以便填埋碾轮601在工作过程中得以最大限度地向下碾压沙土,从而有助于提高碾压作业效率。
75.当处于接苗架504上的待植苗木514通过落苗口520落入到苗木种植坑中之后,所述的填埋装置6开始工作,其中的堆沙犁刀602在工作过程中将苗木种植坑一侧的沙土推送到苗木种植坑,然后,由填埋碾轮601在工作过程中对堆沙犁刀602推送到苗木种植坑中的沙土进行碾压作业。为了提高填土作业效率,所述堆沙犁刀602的工作面优选采用抛物型曲面结构,如图36所示;另外,所述的堆沙犁刀602通常设置2套,且在2套堆沙犁刀602之间形成供待植苗木514通过的通道;所述的2套堆沙犁刀602在工作过程中可以将苗木种植坑相对两侧的沙土推送到苗木种植坑。为了提高碾压作业效率,所述的填埋碾轮601通常设置2个,且以并排方式分别与碾轮支架608形成相对转动的活动连接结构。
76.如图33所示,所述的填埋装置6处于自然下垂状态时,其中的堆沙犁刀602、犁刀滚轮604、填埋碾轮601的最底端依次下降,所述的犁刀滚轮604的轮厚小于填埋碾轮601的轮厚。采用这样的结构设计,一方面可以保证填埋装置6在硬质化地面运动时,其中的堆沙犁刀602不直接与地面接触而产生刮擦,从而保护堆沙犁刀602,通过第一连杆603、第二连杆605、第三连杆607、第一夹板606之间所形成的平行四边形机构,还使得堆沙犁刀602在受到超过限定力的时候,能够平行缩回,另一方面还可以保证填埋装置6在软质化地面如沙地上运动时,由于犁刀滚轮604的轮厚小于填埋碾轮601的轮厚,利用第四扭簧611所产生的一定作用力,可以使犁刀滚轮604压入沙土里面,以保证堆沙犁刀602可以深入沙土中,以便堆沙犁刀602在工作过程中可以将苗木种植坑相对两侧的沙土更多地推送到苗木种植坑,同时,由于填埋碾轮601相对于犁刀滚轮604更低,在同一水平面上,其所受第三扭簧610的弹力更大,进而使得填埋碾轮601在工作过程中可以对堆沙犁刀602推送到苗木种植坑中的沙土进行压紧、压实作业。
77.所述的自动化植苗设备通常是安装在运动底盘上,由拖车牵引前行,其中的堆沙犁刀602的尖端部朝着拖车前行方向,当一个植苗点的植苗作业完成后,拖车牵引自动化植苗设备移动到下一个植苗点。当自动化植苗设备移动到指定的植苗位置后,所述的分苗装置3启动,并通过拨苗轮312向接苗架504输出待植苗木514;所述的让位钻孔装置4通过钻杆406形成苗木种植坑,先由接苗架驱动机构将接苗架504接收到的待植苗木514推送至竖直状态,再启动落苗机构,以使接苗架504上处于竖直状态的待植苗木514可以落入到苗木种植坑中。当分苗装置3、让位钻孔装置4、插苗装置5完成相应的工作后,所述的自动化植苗设备继续前进,而待植苗木514将露出沙土表面一定高度,通过堆沙犁刀602将苗木种植坑旁侧的沙土推送到苗木种植坑,最后由填埋碾轮601对堆沙犁刀602推送到苗木种植坑中的沙土进行碾压作业。由此,通过分苗装置3、让位钻孔装置4、插苗装置5、填埋装置6共同配合而完成一体化的自动化植苗作业,极大地减轻了人工作业的劳动强度,并大幅度提高了植苗作业效率和作业质量,有效地降低了植树造林的投入成本。
78.为了保证待植苗木514的成活率,通常,可以在同一个苗木种植坑中植苗2棵,为此,可以使接苗架504上接收到的待植苗木514先达到2棵,如图22所示。另外,在限位板512上开设若干条形导槽519,所述的落苗板510设置两块,且分别位于落苗口520的相对两侧,每一块落苗板510分别与独立的导滑销518连接;所述电磁阀513的本体部与其中一块落苗板510对应的导滑销518连接,电磁阀513的动作输出端与另一块落苗板510对应的导滑销518连接;所述的导滑销518分别与对应的条形导槽519之间形成滑动配合结构,所述的电磁阀513通过驱动两块落苗板510之间产生相对运动来使落苗口520打开或者关闭。
79.采用这样的结构设计,由于电磁阀513不固定,不仅可以使两块落苗板510同时分开,防止某一侧的落苗板510的外展距离过大,以避免与让位钻孔装置4部分的第一丝杠402相撞,而且,通过电磁阀513控制两块落苗板510的开闭动作,可使电磁阀513在弹开的一瞬间便趋向于沿条形导槽519展开,从而避免发生滑动卡滞,以保证两块落苗板510到达左右极限位置,进而保证处于接苗架504上的2棵待植苗木514能够同时落下到同一个苗木种植坑中,实现一次性插苗两根,以保证待植苗木514的存活率。需要说明的是,如果落苗板510只是单方向打开,容易造成某一棵待植苗木514先落下,该先落下的待植苗木514如果导致了落苗口520发生堵塞或者卡滞,这将严重影响第二棵待植苗木514的顺利落下。
80.为了进一步地提高所述的自动化植苗设备的自动化作业水平,可以增加设置中心控制器,所述的中心控制器可以采用plc或者mcu等微处理器,所述的分苗电机303、让位电机401、钻孔电机411、第一电磁铁501、电动推杆502、第二电磁铁506、电磁阀513、落苗电机515分别与中心控制器形成电连接。利用中心控制器进行集中控制,不仅可以进一步提高自动化植苗设备的植苗作业效率和作业质量,而且有助于进一步地减轻植苗作业的劳动强度。
81.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,应当指出的是,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。