1.本发明属于电动汽车传动技术领域,特别涉及一种双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥。
背景技术:
2.随着电动汽车的普及与保有量的增加,人们对电动汽车的要求也逐渐从以舒适、代步、经济为主,过渡到对性能、操控、动力有了更高的要求,也催生了如特斯拉、比亚迪唐等一系列高性能电动汽车。但由于起步较晚以及技术积累较少等原因,目前国内一些高性能电动汽车生产厂家在相关技术上相较于国外某些厂商仍存在一定的差距。
3.而为了提高电动汽车的操控性能,就有必要增强汽车在加速以及过弯时的性能表现。对于带有双电机的电驱动桥来说,两电机间的转矩耦合可以显著提高汽车在高负荷需求下的动力性能,譬如加速及超车性能;一个电机负责驱动,另一电机负责进行转矩的轮间定向分配则可以一方面提高电机负荷率来提升行驶经济性,同时转矩分配的电机可以通过力矩在左右车轮的再分配改善汽车的过弯性能。因此发展带有双电机转矩耦合以及转矩定向分配功能的电动驱动桥就成为一种技术实现路径。
4.传统驱动桥位于汽车传动系统末端,主要由主减速器、差速器、半轴以及驱动桥壳等组成。由于传统对称式锥齿轮差速器的“差速不差扭”的特性,驱动转矩只能在左、右车轮间近似均匀分配,致使当汽车左、右车轮行驶在附着系数不同的路面上时,只能按低附着系数一侧的路面输出扭矩,无法充分利用路面附着条件,导致汽车的通过性下降,严重时还会出现与低附着系数路面接触的一侧轮胎打滑造成汽车发生侧滑等危险情况。另外,当汽车转弯时,由于载荷会从内侧向外侧转移,导致外侧车轮需求转矩增加,而内侧车轮由于载荷的降低并不需要如正常行驶时一样的转矩,传统差速器始终平均分配左右轮力矩的特性致使汽车的转弯机动性下降,严重时会导致车轮产生滑转从而使汽车出现失稳情况。
5.若驱动转矩能在左、右车轮间可控制地进行一定程度地定向分配,则可充分利用每侧车轮的附着性能,大大改善汽车的通过性以及弯道性能。例如当汽车左、右车轮处路面附着条件不同时,驱动转矩可由低附着一侧向高附着一侧进行分配,从而充分利用路面附着条件,提高汽车通过性,减少侧滑情况的发生;当汽车高速转弯时,驱动转矩可由内侧车轮向外侧车轮进行分配,则可产生一个附加的有助于转向的横摆力矩,增加侧向力裕度,提高转弯机动性和极限转弯能力,同时也可防止内侧车轮发生滑转,增加安全性。由于该技术是直接对驱动转矩进行定向定量分配,因此相较于同样可以防止汽车在极限工况下发生失控的传统车身电子稳定系统esp来说,可以在一定程度上避免动力损失,具有更佳的动力性与经济性。
6.因此,作为一种应用于高性能电动汽车的技术方案,一种双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,兼具了转矩定向分配和转矩耦合的优势,使汽车在不同工况下行驶时均具有较好的性能表现,在提高安全性的同时,也满足了电动汽车的动力性、经济性、通过性以及操纵稳定性等性能,具有一定的工程应用价值和社会意义。
技术实现要素:
7.本发明的目的是针对现有技术的缺陷,提供一种双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,通过对转式双转子电机双端输出大小相等、方向相反的扭矩来实现转矩定向分配以及转矩耦合驱动模式,同时具有主驱动电机单独和双转子电机单独驱动模式,增加电动汽车的动力性、通过性以及极限转弯性能。通过控制辅助电机推动接合套处于不同位置,实现上述四种工作模式的切换。
8.在主驱动电机单独驱动模式下,仅由主驱动电机输出动力,提高电机负荷率和驱动效率。
9.在转矩定向分配驱动模式下,所述电动驱动桥输出的驱动转矩能在左、右车轮间可控制地进行一定程度地定向分配,解决了传统对称式锥齿轮差速器“差速不差扭”的问题,按工况需求可以综合改善汽车操纵稳定性、驾驶机动性、转弯节能性和越野通过性。
10.在双电机转矩耦合驱动模式下,双转子电机起助力电机的作用,与主驱动电机输出的转矩进行耦合,共同驱动汽车行驶,提高汽车的动力性。
11.在双转子电机单独驱动模式下,仅由双转子电机输出动力,提高汽车驱动效率。
12.为实现上述目的,本发明提供的技术方案为:
13.一种双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,包括:
14.主驱动电机,其是一个空心轴式内转子永磁同步电机,布置在所述差速器一侧,用于输出驱动转矩驱动汽车行驶。所述主驱动电机产生的转矩通过主驱动电机输出轴输出。
15.对转式双转子电机,其包括外壳体以及同轴可相对旋转设置的外转子和内转子,布置在所述差速器另一侧,其输出的转矩可用于实现转矩定向分配、双电机转矩耦合以及双转子电机单独等驱动模式。所述对转式双转子电机内转子产生的转矩通过内转子输出轴输出,外转子产生的转矩通过外转子输出轴输出。
16.优选的是,所述外壳体与所述壳体制为一体;所述外转子可通过一对滚动轴承轴向限位并旋转支承在所述壳体内腔,且左端通过滚针轴承支承所述第一半轴;所述内转子为中空结构,可旋转地支承在所述外转子内腔,其输出端通过外花键连接到所述差速器壳体上,所述第一半轴从其中穿过并通过滚针轴承支承在所述内转子上。
17.锥齿轮差速器,其用于使两侧半轴实现不同转速,由差速器壳体接收所述主驱动电机与所述对转式双转子电机产生的转矩,由第一半轴齿轮和第二半轴齿轮输出转矩。其包括:第一半轴,与所述第一半轴齿轮花键连接,并从壳体一端伸出且法兰连接一侧驱动车轮;第二半轴,与所述第二半轴齿轮花键连接,并从壳体另一端伸出且法兰连接另一侧驱动车轮;行星齿轮轴,其穿过所述差速器壳体中心,并销钉固定在所述差速器壳体上;第一圆锥行星齿轮,其旋转支承在所述行星齿轮轴上,并同时与所述第一半轴齿轮和所述第二半轴齿轮外啮合;第二圆锥行星齿轮,其旋转支承在所述行星齿轮轴上,并同时与所述第一半轴齿轮和所述第二半轴齿轮外啮合;其中,所述第一圆锥行星齿轮和所述第二圆锥行星齿轮对称布置;所述差速器壳体左端通过内花键与所述对转式双转子电机的内转子输出轴花键连接并支承。
18.优选的是,所述第一半轴和所述第二半轴分别通过等速万向节连接左右两侧车轮。
19.壳体,用于容置驱动桥所有各总成和零部件。其包括:转矩分配机构壳体,为工字
型壳体,中间有一肋板将其分为左右两个腔室;中部壳体;分隔板,左右通过螺栓固定安装在所述转矩分配机构壳体和所述中部壳体之间;主驱动电机壳体;左端盖,螺钉固定在所述转矩分配机构壳体上,将所述转矩分配机构封装在所述转矩分配机构壳体内,且通过轴承支承所述第一半轴;右端盖,螺钉固定在所述主驱动电机壳体上,将所述主驱动电机封装在所述主驱动电机壳体内,且通过轴承支承所述第二半轴。
20.优选的是,所述壳体整体上被所述肋板、所述分隔板、所述主驱动电机壳体端面划分为四个腔室,分别容置所述转矩分配机构、所述对转式双转子电机、所述锥齿轮差速器和所述主驱动电机减速机构,以及所述主驱动电机;所述转矩分配机构和所述对转式双转子电机位于所述壳体左侧,亦可与所述主驱动电机和所述主驱动电机减速机构组成的主动力源总成围绕所述锥齿轮差速器彼此调换位置,将其布置在壳体右侧。
21.主驱动电机减速机构,其主体是一个单级行星排,用于接收所述主驱动电机输出的转矩,将转矩增大后输出。其包括太阳轮、行星轮、行星架、齿圈、行星齿轮轴和一个单向离合器;所述太阳轮与所述主驱动电机输出轴花键连接;所述齿圈与所述中部壳体通过花键连接,并顶在所述中部壳体内部凸环上;所述行星轮分别与所述太阳轮和所述齿圈啮合传动,并通过所述行星齿轮轴支承在所述行星架上自由移动;所述行星架通过外花键与所述单向离合器的内环花键连接,所述单向离合器的外环通过花键与所述锥齿轮差速器的差速器壳体连接。
22.优选的是,所述单向离合器的设置应实现,当动力由所述内环顺时针旋转传递至所述外环时,或当动力由所述外环逆时针旋转传递至所述内环时单向离合器接合,否则脱开。
23.转矩分配机构,其包括辅助电机、丝杠螺母机构以及由接合套、左接合齿、右接合齿、锁环、接合毂等组成的三相位同步器。所述辅助电机为直流伺服电机,用于驱动模式切换控制的动力源;所述丝杠螺母机构包括丝杠和螺母,所述丝杠与所述辅助电机的输出轴固连一同旋转,经运动转换带动所述螺母左右移动,所述螺母上固连有拨叉,所述拨叉套在所述接合套的环槽中,带动所述接合套左右移动;所述接合套采取特殊结构,左侧设置环槽,右侧通过内花键与所述对转式双转子电机的外转子输出轴长外花键滑动连接;所述左接合齿通过螺钉固连到左端盖上,并通过滚针轴承支承在所述第一半轴上;所述右接合齿通过内花键连接到所述第一半轴上;所述接合毂通过滚针轴承支承在所述第一半轴上;所述锁环成对设置在所述左接合齿与所述接合毂,以及所述右接合齿与所述接合毂之间,用于实现模式切换时的所述接合套与左右接合齿的快速同步;所述拨叉拨动所述接合套向左移动可与所述左接合齿接合,从而锁止所述对转式双转子电机的外转子;向右移动则可与所述右接合齿接合,从而连接所述对转式双转子电机的外转子与所述第一半轴;位于中间位置时则自由旋转、无法输出动力。
24.双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,具有主电机单独、转矩定向分配、双电机转矩耦合、双转子电机单独等四种驱动模式,通过控制所述辅助电机推动所述接合套处于左、中、右三种不同位置,便能使其在四种驱动模式间进行切换。其特征还在于,包括:
25.当工作在主电机单独驱动模式时,此时所述主驱动电机起动,所述对转式双转子电机不起动,同时所述辅助电机也不起动,所述接合套处于中间位置,即所述转矩分配机构
不工作。在该模式下,汽车仅由所述主驱动电机驱动,其输出的转矩经过所述主驱动电机减速机构中的太阳轮、行星轮、行星架后作用到所述单向离合器内环上,根据其作用原理,并规定汽车向前行驶时主驱动电机输出轴顺时针旋转,则此时所述单向离合器处于接合状态,并将动力由内环传至外环,作用至所述差速器壳体上,由于传统对称式锥齿轮差速器等分扭矩的原理,作用在所述差速器壳体上的转矩将被等分到所述第一半轴和所述第二半轴上,驱动汽车行驶。此时,所述第一半轴与所述第二半轴输出的转矩为:其中,t
o1
为所述第一半轴输出的转矩,t
o2
为所述第二半轴输出的转矩,t
i1
为所述主驱动电机输出的转矩,i为所述主驱动电机减速机构的传动比,且i=k 1,其中k为所述主驱动电机减速机构的行星排特征常数。
26.当工作在转矩定向分配驱动模式时,此时除了所述主驱动电机起动外,所述对转式双转子电机收到控制信号并起动,同时所述辅助电机起动,并推动所述接合套与所述右接合齿结合,此时所述单向离合器处在接合状态。在该模式下,所述主驱动电机输出的转矩如上述主驱动电机单独驱动模式一样直接传递到所述差速器壳体上,所述对转式双转子电机输出的转矩使一侧半轴的转矩减小,另一侧半轴的转矩增大。若此时所述对转式双转子电机内转子输出正向转矩,外转子输出负向转矩,则所述第一半轴与所述第二半轴输出的转矩为:其中,t
i2
为所述对转式双转子电机输出的转矩。
27.在转矩定向分配模式下,当汽车左转弯时,若对转式双转子电机内转子输出正向转矩,外转子输出负向转矩,由定向分配的转矩产生的横摆力矩能增大汽车横摆;若对转式双转子电机内转子输出负向转矩,外转子输出正向转矩,由定向分配的转矩产生的横摆力矩能减小汽车横摆。当汽车右转弯时,若对转式双转子电机内转子输出负向转矩,外转子输出正向转矩,由定向分配的转矩产生的横摆力矩能增大汽车横摆;若对转式双转子电机内转子输出正向转矩,外转子输出负向转矩,由定向分配的转矩产生的横摆力矩能减小汽车横摆。
28.当工作在双电机转矩耦合驱动模式时,此时除了所述主驱动电机起动外,所述对转式双转子电机收到控制信号并起动,同时所述辅助电机起动,并推动所述接合套与所述左接合齿结合,此时所述对转式双转子电机的外转子被固连到壳体上,同时所述单向离合器处在接合状态。在该模式下,所述主驱动电机输出的转矩与所述对转式双转子电机内转子输出的转矩均直接传递到所述差速器壳体上。此时,所述第一半轴与所述第二半轴输出的转矩为:的转矩为:
29.当工作在双转子电机单独驱动模式时,此时所述主驱动电机不工作,所述对转式双转子电机收到控制信号并起动,同时所述辅助电机起动,并推动所述接合套与所述左接合齿结合,此时所述对转式双转子电机的外转子被固连到壳体上。此时动力由所述对转式双转子电机的内转子传到所述差速器壳体上,所述差速器壳体带动所述单向离合器外环同步旋转,由于此时所述主驱动电机不工作,因此内环处于静止状态,由单向离合器工作原理,此时其处于分离状态,动力无法从外环传至内环。此时,所述第一半轴与所述第二半轴
输出的转矩为:
30.本发明的有益效果是:
31.(1)本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,一方面解决了传统锥齿轮差速器“差速不差扭”的弊端,使得汽车的驱动转矩可以按照控制逻辑的控制要求以任意大小相等方向相反的效果定向地分配到后轴左右两侧车轮,既可以实现转矩从转速较快一侧车轮转移至转速较慢一侧车轮,亦可以反过来,在严格不改变纵向总驱动转矩的前提下,实现了左右两侧车轮驱动转矩的任意分配,同时相较于传统esp技术,也在一定程度上避免了动力损失,提高了车辆的操纵稳定性、转弯机动性和驾驶乐趣;另一方面,通过双转子电机与主驱动电机进行转矩耦合共同驱动车辆行驶,可以在某些工况如起步、急加速和爬坡时提高汽车的驱动转矩,提升汽车的动力性,带来更好的驾驶体验。
32.(2)本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,利用对转式双转子电机作为转矩定向分配机构的驱动动力源,无机械摩擦损失,动作响应迅速,同时省去了传统转矩定向分配的行星齿轮机构,因此系统集成度高、结构紧凑、空间占用小,对于实现转矩定向分配功能的控制则更加简单、可靠、迅速;另外,采用与现有汽车驱动桥相同的传统对称式锥齿轮差速器,产品工艺继承性好。
33.(3)本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,相比于同样可以实现转矩分配功能的轮毂电机分布式驱动系统,则没有增加簧下质量,使悬架共振频率更大,减小了共振几率,降低对汽车平顺性的影响。
34.(4)本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,将主驱动电机、对转式双转子电机、差速器、主驱动电机减速机构、转矩分配机构集成到一起,仅需控制辅助电机推动接合套处于不同位置便可实现四种工作模式的切换,无需额外执行元件。其中主驱动电机采用了空心轴式内转子永磁同步电机,双转子电机采用对转式双转子电机,两个电机分别布置在差速器两侧,使整个装置质量相对对称,可以布置在车架中部,使左右半轴与悬架的布置空间相对一致,载荷分布均匀。
附图说明
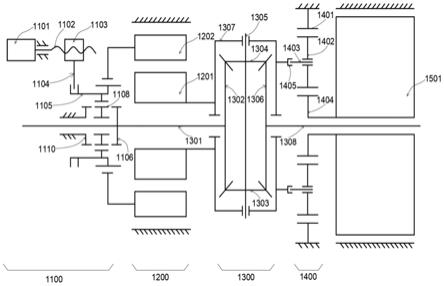
35.图1为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥结构示意图。
36.图2为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥结构图。
37.图3为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥在主驱动电机单独驱动时的转矩流向示意图。
38.图4为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥在驱动转矩由第一半轴向第二半轴分配时的转矩流向示意图。
39.图5为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥在驱动转矩由第二半轴向第一半轴分配时的转矩流向示意图。
40.图6为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥在
转矩耦合驱动时的转矩流向示意图。
41.图7为本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥在双转子电机单独驱动时的转矩流向示意图。
具体实施方式
42.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
43.下面结合附图给出本发明的一种实施例。
44.如图1、2所示,本发明提供了一种双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,主要由主驱动电机1501、转矩分配机构1100、双转子电机 1200、锥齿轮差速器机构1300和主驱动电机减速机构1400等构成。
45.转矩分配机构1100包括辅助电机1101、丝杠1102、螺母1103、拨叉1104 以及由接合套1105、左接合齿1110、右接合齿1106、左锁环1109、右锁环1107、接合毂1108等组成的三相位同步器。辅助电机1101输出轴与丝杠1102固连一同旋转,丝杠1102经运动转换带动螺母1103左右移动;螺母1103上固连有拨叉1104,拨叉1104套在接合套1105的环槽中,带动接合套1105左右移动。
46.接合套1105采取特殊结构,左侧设置环槽,右侧通过内花键与对转式双转子电机的外转子1202输出轴长外花键滑动连接。拨叉1104拨动接合套1105向左移动可与左接合齿1110接合,从而锁止所述对转式双转子电机的外转子;向右移动则可与右接合齿1106接合,从而连接所述对转式双转子电机的外转子与所述第一半轴;位于中间位置时则自由旋转、无法输出动力;左接合齿1110通过螺钉固连到左端盖1601上,并通过滚针轴承支承在第一半轴1301上,右接合齿1106通过内花键连接到第一半轴1301上;接合毂1108通过滚针轴承支承在第一半轴1301上;左锁环1109和右锁环1107成对设置在左接合齿1110与接合毂1108,以及右接合齿1106与接合毂1108之间,用于实现模式切换时的接合套1105与左、右接合齿的快速同步。
47.对转式双转子电机1200布置在差速器左侧,其外壳体与壳体制为一体,外转子1202可通过一对滚动轴承轴向限位并旋转支承在壳体内腔,且左端通过滚针轴承支承第一半轴;内转子1201为中空结构,可旋转地支承在外转子1202 内腔,其输出端通过外花键连接到差速器壳体1307上,第一半轴1301从其中穿过并通过滚针轴承支承在内转子1201上。
48.锥齿轮差速器机构1300,其主要由第一半轴1301、第二半轴1308、第一半轴齿轮1302、第二半轴齿轮1306、两个圆锥行星齿轮1303和1304、行星齿轮轴1305和锥齿轮差速器壳体1307构成。其中第一半轴齿轮1302与第一半轴1301 花键连接,第二半轴齿轮1306与第二半轴1308花键连接,由差速器壳体1307 接收主驱动电机1501和对转式双转子电机内转子1201产生的转矩,并由第一半轴1301和第二半轴1308分别通过等速万向节(图中未示出)将动力输出至左右两侧车轮。锥齿轮差速器壳体1307左端通过内花键与对转式双转子电机内转子1201输出轴连接并支承,右端同样通过内花键与所述单向离合器1405的外环连接并支承。行星齿轮轴1305从锥齿轮差速器壳体1307中心穿过,并销钉固定在锥齿轮差速器壳体1307上,行星齿轮轴1305中部对称安装两个圆锥行星齿轮1303和1304,使两个圆锥行星齿轮1303和1304面对面布置在锥齿轮差速器中心两侧,并分别与布置在其左右两侧的第一
半轴齿轮1302和第二半轴齿轮1306外啮合。
49.壳体,包括转矩分配机构壳体1602、分隔板1603、中部壳体1604以及主驱动电机壳体1605,另外还包括位于两侧的左端盖1601和右端盖1606,用于容置驱动桥所有各总成和零部件。转矩分配机构壳体1602为工字型壳体,中间有一肋板将其分为左右两个腔室;分隔板1603左右通过螺钉固定安装在转矩分配机构壳体1602和中部壳体1604之间;左端盖1601螺钉固定在转矩分配机构壳体1602上,将转矩分配机构1100封装在转矩分配机构壳体1602内,且通过轴承支承第一半轴1301;右端盖1606螺钉固定在主驱动电机壳体1605上,将主驱动电机1501封装在主驱动电机壳体1605内,且通过轴承支承第二半轴1308;第一半轴1301外端通过滚动轴承支承在左端盖1601上,第二半轴1308外端通过滚动轴承支承在主驱动电机壳体1605上;壳体整体上被肋板、分隔板1603、主驱动电机壳体1605端面划分为四个腔室,分别容置转矩分配机构1100、对转式双转子电机1200、锥齿轮差速器1300和主驱动电机减速机构1400,以及主驱动电机1501。
50.主驱动电机减速机构1400,其主体是一个单级行星排,主要由太阳轮1404、三个圆周均布的行星轮1402、行星架1403、齿圈1401和一个单向离合器1405 构成。其中齿圈1401顶在中部壳体1604内部凸环上,并与中部壳体1604通过花键固连,三个行星轮1402分别与太阳轮1404和齿圈1401啮合传动,并通过行星齿轮轴支承在行星架1403上自由转动,行星架1403与差速器壳体1307之间通过单向离合器1405连接,行星架1403通过外花键与单向离合器1405的内环花键连接,差速器壳体1307通过内花键与单向离合器1405的外环花键连接,太阳轮1404可旋转地支承在主驱动电机1501的空心内转子轴上,主驱动电机 1501的空心内转子轴通过外花键插入到太阳轮1404的内花键孔内。
51.需要说明的是,主驱动电机减速机构1400可由单排单行星轮行星齿轮机构、单排双行星轮行星齿轮机构、多排行星齿轮机构或其它形式的减速机构构成,且各种结构形式的减速机构均可实现相同的功能,因此变换主驱动电机减速机构1400的形式并不视为对本发明的创新。
52.主驱动电机1501,其位于主驱动电机减速机构1400的右侧,是一个空心轴式内转子永磁同步电机,连接右侧车轮的第二半轴1308从其空心转子轴内穿出。空心轴式内转子输出轴加工有外花键,与主驱动电机减速机构1400的太阳轮 1404的内花键孔进行连接,主驱动电机1501可通过太阳轮1404将驱动转矩传递至主驱动电机减速机构1400,并作用到锥齿轮差速器壳体1307上,最终等分到第一半轴1301和第二半轴1308上,驱动汽车行驶。主驱动电机1501的内转子通过两个滚针轴承可旋转地支承在第二半轴1308上,其壳体1605左端与差速器壳体1604通过螺栓进行连接,右端与右端盖1606通过螺钉进行连接。
53.单向离合器1405是一个滚子式单向离合器,其外环与差速器壳体1307通过花键连接,其内环与主驱动电机减速机构1400的行星架1403通过花键连接。
54.下面结合附图对本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥的工作模式作进一步的详细说明。
55.双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥,具有主电机单独、转矩定向分配、双电机转矩耦合、双转子电机单独等四种驱动模式,其各驱动模式与接合套位置的对应关系如下表所示。
[0056][0057][0058]
当工作在主驱动电机单独驱动模式时,接合套1105处于中间位置;当工作在转矩定向分配驱动模式时,接合套1105与右接合齿1106接合;当工作在双电机转矩耦合驱动模式时,接合套1105与左接合齿1110接合;当工作在双转子电机单独驱动模式时,接合套1105与左接合齿1110接合。
[0059]
本发明所述的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥, 工作原理如下:
[0060]
主驱动电机单独驱动模式:
[0061]
以图2所示的双转子电机耦合圆锥差速器单侧轴壳的多模式电动驱动桥的实施例结构图为例,在汽车不需要增加转弯机动性或维持稳定性时,例如当汽车处于正常直线行驶和正常差速转弯的工况时,或在整车需求功率处在主驱动电机高效率区间时,例如中等负荷中高速匀速行驶工况,对转式双转子电机1200 不工作,主驱动电机1501单独驱动车辆行驶,左、右两侧车轮驱动转矩相同,无需转矩分配。
[0062]
此时主驱动电机1501起动,对转式双转子电机1200不起动,同时辅助电机1101也不起动,接合套1105处于中间位置,即转矩分配机构1100不工作。在该模式下,汽车仅由主驱动电机1501驱动,其输出的转矩经过主驱动电机减速机构1300中的太阳轮1404、行星轮1402、行星架1403后作用到单向离合器 1405内环上,根据其作用原理,并规定汽车向前行驶时主驱动电机1501输出轴顺时针旋转,则此时单向离合器1405处于接合状态,并将动力由内环传至外环,作用至差速器壳体1307上,由于传统对称式锥齿轮差速器等分扭矩的原理,作用在差速器壳体1307上的转矩将被等分到第一半轴1301和第二半轴1308上,驱动汽车行驶。此时,第一半轴1301与第二半轴1308输出的转矩为:其中,t
o1
为第一半轴1301输出的转矩,t
o2
为第二半轴1308 输出的转矩,t
i1
为主驱动电机1501输出的转矩,i为主驱动电机减速机构1400 的传动比,且i=k 1,其中k为主驱动电机减速机构1400的行星排特征常数。转矩分配流如图3所示。
[0063]
转矩定向分配模式:
[0064]
当汽车处于中高速转弯工况,需要将内侧车轮转矩定向分配到外侧车轮以提高转弯机动性时,此时除了主驱动电机1501起动外,对转式双转子电机1200 收到控制信号并起动,同时辅助电机1101起动,带动丝杠1102旋转使接合套 1105与右接合齿1106结合,此时单向离合器1405处在接合状态。
[0065]
若设定汽车驱动时车轮的旋转方向为正方向,反之为负方向,以汽车左转弯为例分析:
[0066]
在该模式下,主驱动电机1501输出的转矩如上述主驱动电机单独驱动模式一样直接传递到差速器壳体1307上,对转式双转子电机1200输出的转矩使一侧半轴的转矩减小,另一侧半轴的转矩增大。此时控制对转式双转子电机1200 的内转子1201输出正向转矩t
i2
,外转子1202则输出负向转矩-t
i2
。外转子1202 输出的负向转矩-t
i2
通过接合套1105、右接合齿1106输入到第一半轴1301上,内转子1201输出的正向转矩t0作用到差速器壳体1307上,由于传统对称式锥齿轮差速器等分扭矩的原理,作用在差速器壳体1307上的转矩将被等分到第一半轴1301和第二半轴1308上,因此两半轴获得的转矩均为
[0067]
所以最终由对转式双转子电机1200输入到第一半轴1301的转矩是由外转子1202通过接合套1105、右接合齿1106输入到第一半轴1301的转矩-t
i2
、内转子1201通过差速器壳体1307等分至第一半轴1301的转矩两部分之和构成,其结果为而由对转式双转子电机1200最终输入到第二半轴1308的转矩就是内转子1201通过差速器壳体1307等分至第二半轴1308的转矩则第一半轴1301与第二半轴1308输出的转矩为:则第一半轴1301与第二半轴1308输出的转矩为:
[0068]
可以看出,由对转式双转子电机1200输入进第一半轴1301和第二半轴1308 的转矩等大反向,因此不改变总的纵向驱动转矩,且与第一半轴1301相连的左侧车轮转矩减少,与第二半轴1308相连的右侧车轮转矩增加,可以产生一个有助于左转的横摆力矩,提高了汽车的左转弯机动性。转矩分配流如图4所示。
[0069]
需要说明的是,若对转式双转子电机1200的内、外转子在此时输出的转矩方向对调,则驱动转矩将定向地由右侧车轮分配到左侧车轮,将产生一个防止车辆过度转向的横摆力矩,用于保持汽车稳定性。
[0070]
同理,当汽车中高速右转弯时,电机控制器控制对转式双转子电机1200的内转子1201输出负向转矩-t
i2
,外转子1202输出正向转矩t
i2
,在不改变总的纵向驱动转矩的前提下,可以产生一个有助于右转的横摆力矩,提高了汽车的右转弯机动性。转矩分配流如图5所示。需要说明的是,若对转式双转子电机 1200的内、外转子在此时输出的转矩方向对调,则驱动转矩将定向的由左侧车轮分配到右侧车轮,将产生一个防止车辆过度转向的横摆力矩,用于保持汽车稳定性。
[0071]
双电机转矩耦合驱动模式:
[0072]
为了提高动力总成利用率和驱动效率,使汽车具有更好的加速能力和爬坡能力,满足整车加速动力需求,当汽车处于一些特定工况时,对转式双转子电机1200与主驱动电机1501输出的转矩进行耦合共同驱动汽车行驶。此时,主驱动电机1501提供基础恒定功率输出,对转式双转子电机1200“削峰填谷”:即在起步或急加速工况时,转矩需求大,为了避免主驱动电机1501进入峰值负荷低效率区间以及发生较大幅度的功率波动,此时控制对转式双转子电机1200 参与驱动,其输出转矩与主驱动电机1501耦合后共同驱动汽车行驶。
[0073]
此时除了主驱动电机1501起动外,对转式双转子电机1200收到控制信号并起动,
同时辅助电机1101起动,并推动接合套1105与左接合齿1110结合,此时对转式双转子电机1200的外转子1202被固连到壳体上,同时单向离合器 1405处在接合状态。
[0074]
在该模式下,主驱动电机1501输出的转矩与对转式双转子电机内转子1201 输出的转矩均直接传递到差速器壳体1307上。此时控制对转式双转子电机1200 的内转子1201输出正向转矩t
i2
,外转子1202则输出负向转矩-t
i2
,由于外转子1202与左接合齿1110结合,被固连到了壳体上,因此外转子1202不转动;而内转子1201输出的正向转矩t
i2
则作用到差速器壳体1307上,由于传统对称式锥齿轮差速器等分扭矩的原理,作用在差速器壳体1307上的转矩将被等分到第一半轴1301和第二半轴1308上,因此两半轴获得的转矩为此时,所述第一半轴1301与所述第二半轴1308输出的转矩为:转矩分配流如图6所示。
[0075]
可以看出,对转式双转子电机1200同时对两半轴施加了等大同向的转矩,与主驱动电机1501输出的转矩耦合进行驱动,可以为汽车提供更大的驱动转矩。另外也可以利用对转式双转子电机1200反拖发电,以此来调节主驱动电机1501 工作点,使其落在高效率区间,优化主电机驱动效率,但这会增加二次能量转换损失,一般不采用。
[0076]
双转子电机单独驱动模式:
[0077]
在整车需求功率较小,并处在对转式双转子电机1200高效率区间时,例如中小负荷低速行驶工况,此时可以控制对转式双转子电机1200单独驱动车辆行驶。
[0078]
此时主驱动电机1501不工作,对转式双转子电机1200收到控制信号并起动,辅助电机1101起动,并推动接合套1105与左接合齿1110结合,此时对转式双转子电机1200的外转子1202被固连到壳体上。此时动力由对转式双转子电机1200的内转子1201传到差速器壳体1307上,并最终等分到左右半轴,因此第一半轴1301与第二半轴1308输出的转矩为:转矩分配流如图7所示。
[0079]
同时,差速器壳体1307带动单向离合器1405外环同步旋转,由于此时主驱动电机1501不工作,因此内环处于静止状态,由单向离合器1405工作原理可知,此时其处于空转状态,动力无法从外环传至内环,因此无法带动主驱动电机减速机构以及主驱动电机随动运转,避免了齿轮运转产生的搅油损失以及电机的随动损失。
[0080]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。