1.本发明属于现代检测与智能安全防护技术领域,具体来讲涉及一种工程车辆机械智能主动安全防护系统。
背景技术:
2.工程车辆及机械是建筑工程的主干力量,由于它们的出现不仅使建筑工程的进度倍增,还极大地减少了人力,其主要用途是工程运载、挖掘、抢修和公路、隧道等基础设施建设。现有大部分工程施工车辆及机械安全防范的主要手段还是依赖在工程车辆及机械上加装爆闪灯、警报喇叭,亦或布设安全锥、警示牌、设置警戒线等;虽然也存在工程车辆上加装倒车雷达、疲劳驾驶的监控、前向雷达防撞与自动刹车、后向倒车提醒等功能,但总体上缺乏对于工程车辆及机械作业安全防护的系统化设计,技术思路基本上停留在预警工程车辆及机械操作人员为主,且监测盲点多、对作业人员的预警十分有限,预警误报率高、对其它工程车辆及机械的预警效果差等一系列问题,一旦因工程车辆及机械操作不当或失控即极易造成撞人、撞车和撞物。
技术实现要素:
3.因此,为了解决上述不足,本发明在此提供一种工程车辆机械智能主动安全防护系统,以解决上述背景技术中提出的问题。工程车辆及机械智能安全防护系统将采用系统化设计,通过合理布设各类先进的传感器,全天候、无缝监测工程车辆及机械作业时周边的盲区,实时提醒操作人员、预警作业人员,必要时紧急刹车。
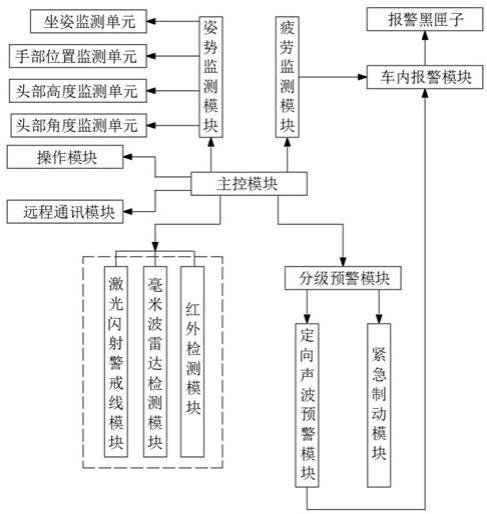
4.本发明是这样实现的,构造一种工程车辆机械智能主动安全防护系统,其特征在于:包括主控模块,该主控模块负责收集各个子模块的数据,并根据子模块的数据做出相应的报警或刹车措施;在所述主控模块的输出端上设置有监测组件、报警组件以及操作模块,其中监测组件包括:用于探测工程车辆机械四周障碍物的距离,并将距离数据发送给主控模块的红外检测模块与毫米波雷达检测模块;用于在工程车辆机械四周2米范围内闪射激光线,人为精准划分车辆危险警戒区域的激光闪射警戒线模块;所述报警组件包括用于对驾驶员进行实时监测的疲劳监测模块,以及用于在出现危险情况时进行分级处理的分级预警模块;其中,分级预警模块上连接有定向声波预警模块和紧急制动模块,所述定向声波预警模块用于将通知语音定向传输给处于危险区域内的作业人员。
5.优化的;所述定向声波预警模块优先通知作业人员,再通知驾驶员。
6.优化的;所述紧急制动模块包括刹车件,该刹车件采用拉线电机方式,电机带动钢丝索,拉动制动踏板进行刹车,解除刹车时,则释放钢丝索。
7.优化的;所述疲劳监测模块的输出端上连接有车内报警模块,用于提示驾驶员,该
车内报警模块与定向声波预警模块相连接。
8.优化的;所述车内报警模块的输出端上安装有报警黑匣子,用于记录驾驶员、报警信息以及行车记录。
9.优化的;所述主控模块的输出端上还连接有操作模块和远程通讯模块。
10.优化的;各个子模块与主控模块之间采用canbus2.0总线通信,通信速率500kbps。
11.优化的;所述主控模块上还连接有姿势监测模块,该姿势监测模块用于对驾驶员在行驶探测工程车辆机械时的各种肢体动作以及操作规范进行监测,具体包括:坐姿监测单元,用于对驾驶员在驾驶过程中的坐姿进行监测,保证驾驶员的正确坐姿;手部位置监测单元,用于检测驾驶员在驾驶过程中是否存在单手驾驶、双手离开方向盘、接打电话的行为,并进行及时的提醒;头部高度监测单元,用于检测驾驶员在驾驶过程中,头部高度处于挡风玻璃整体底部的三分之一处,若存在,发出警报提醒;头部角度监测单元,用于实时监测驾驶员在驾驶过程中,是否存在离开正前方视线时间较长的现象,若存在,则发出警报提醒。
12.本发明具有如下优点:本发明公开了一种工程车辆机械智能主动安全防护系统,包括主控模块,该主控模块负责收集各个子模块的数据,并根据子模块的数据做出相应的报警或刹车措施;在所述主控模块的输出端上设置有监测组件、报警组件以及操作模块;用于探测工程车辆机械四周障碍物的距离,并将距离数据发送给主控模块的红外检测模块与毫米波雷达检测模块;具体优点为;1)工程车辆及机械智能安全防护系统将采用系统化设计,通过合理布设各类先进的传感器,全天候、无缝监测工程车辆及机械作业时周边的盲区,实时提醒操作人员、预警作业人员,必要时紧急刹车;2)通过设计的姿势监测模块,能够对驾驶员在驾驶过程中驾驶规范进行监测,在出现违法或者不规范驾驶中,对驾驶员进行报警提示,避免因不规范驾驶而出现危险情况。
附图说明
13.图1是本发明的防护系统框图。
具体实施方式
14.下面将结合附图1对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.本发明通过改进在此提供一种工程车辆机械智能主动安全防护系统,如图 1所示,可以按照如下方式予以实施,本发明包括主控模块,该主控模块负责收集各个子模块的数据,各个子模块接入直流24v供电,并根据子模块的数据做出相应的报警或刹车措施;在主控模块的输出端上设置有监测组件、报警组件以及操作模块,其中监测组件包括:
用于在作业中,探测工程车辆机械四周障碍物的距离,并将距离数据发送给主控模块的红外检测模块与毫米波雷达检测模块,接着通过报警模块中的定向声波预警模块优先通知作业人员,再通知驾驶员;用于在工程车辆机械四周2米范围内闪射激光线,人为精准划分车辆危险警戒区域的激光闪射警戒线模块;报警组件包括用于对驾驶员进行实时监测的疲劳监测模块,以及用于在出现危险情况时进行分级处理的分级预警模块;其中,分级预警模块上连接有定向声波预警模块和紧急制动模块,定向声波预警模块用于将通知语音定向传输给处于危险区域内的作业人员。
16.本实施例中,紧急制动模块包括刹车件,前向安装红外探测系统或毫米波雷达系统,探测前方障碍物;报警方式采用分级报警,声光报警、驾驶室内外报警,最后一级采取刹车措施;分级报警根据不同距离,报警声音间隔时间改变,距离越小,报警间隔越急促,该刹车件采用拉线电机方式,电机带动钢丝索,拉动制动踏板进行刹车,解除刹车时,则释放钢丝索。
17.本实施例中,疲劳监测模块的输出端上连接有车内报警模块,用于提示驾驶员,该车内报警模块与定向声波预警模块相连接。
18.本实施例中,车内报警模块的输出端上安装有报警黑匣子,用于记录驾驶员、报警信息以及行车记录。
19.本实施例中,主控模块的输出端上还连接有操作模块和远程通讯模块。
20.本实施例中,各个子模块与主控模块之间采用 canbus2.0 总线通信,通信速率 500kbps,采用 can 总线方式优点在于可以接入多个模块,通信速率快,各模块可主动发送数据给主控模块,主控模块也可发送数据给各个模块。
21.本实施例中,主控模块上还连接有姿势监测模块,该姿势监测模块用于对驾驶员在行驶探测工程车辆机械时的各种肢体动作以及操作规范进行监测,通过设计的姿势监测模块,能够对驾驶员在驾驶过程中驾驶规范进行监测,在出现违法或者不规范驾驶中,对驾驶员进行报警提示,避免因不规范驾驶而出现危险情况,具体包括:坐姿监测单元,用于对驾驶员在驾驶过程中的坐姿进行监测,保证驾驶员的正确坐姿;手部位置监测单元,用于检测驾驶员在驾驶过程中是否存在单手驾驶、双手离开方向盘、接打电话的行为,并进行及时的提醒;头部高度监测单元,用于检测驾驶员在驾驶过程中,头部高度处于挡风玻璃整体底部的三分之一处,若存在,发出警报提醒;头部角度监测单元,用于实时监测驾驶员在驾驶过程中,是否存在离开正前方视线时间较长的现象,若存在,则发出警报提醒。
22.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。