用于发电机-跟网型mmc换流站并联供电系统的控制方法
技术领域
1.本发明属于电力系统输配电技术领域,具体涉及一种用于发电机-跟网型mmc换流站并联供电系统的控制方法。
背景技术:
2.随着电力电子器件的高速发展,基于电压源型换流器的柔性直流输电(voltage source converter based high voltage direct current,vsc-hvdc)技术也得到广泛应用。相较基于半控型器件的传统直流系统,vsc-hvdc具有控制灵活、不需要电网提供换相电压、可独立控制有功功率及无功功率、可以为无源网络提供同步交流电源支撑等优势,且具有向无源网络供电、可独立控制有功功率及无功功率、能灵活地实现潮流反转等优点,在新能源并网、交流大电网之间互联、海上风电接入、直流配电网等场景中应用广泛,发展前景巨大。其中模块化多电平换流器mmc凭借其谐波分量较少,不需要应用功率器件串联技术等优势,成为了大规模新能源基地并网中首选的电压源换流器。与此同时,mmc-hvdc作为重要的非同步机电源,在未来电力系统中能够替代同步机电源向系统中供电。
3.mmc-hvdc作为非同步机电源时,主要有跟网型和构网型两种典型控制策略。构网型mmc控制并网点电压的幅值和相位,可以模拟发电机的惯量和阻尼特性,在为无源网络供电时具有独特优势;跟网型mmc通常采用电流矢量控制,外环控制器实现有功/无功量的解耦控制,有功控制环通常定有功功率,无功环可以采用定无功功率/交流电压控制策略,采用锁相环(phase locked loop,pll)跟踪并网点电压,实现与有源电网的同步,在接入系统强度较高时具有更优的阻尼特性。
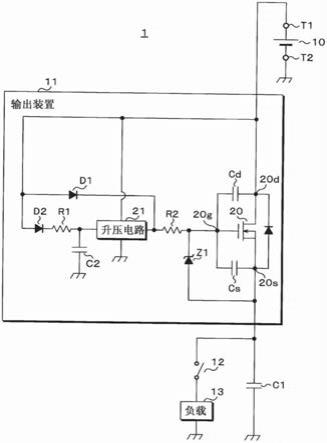
4.随着电能需求的增长、环保压力的增大,对清洁能源的需求不断上升,未来传统同步机电源的主导地位将被打破;随着同步机电源逐渐被非同步机电源取代,发电机与mmc换流站并联供电系统将成为重要的供电方式。相比构网型mmc,跟网型mmc在接入强系统时阻尼特性良好,因此发电机-跟网型mmc并联供电系统在并入交流电网时同步稳定性较强;当跟网型mmc无功环采用定交流电压控制时,交流系统发生严重故障时跟网型mmc能够快速提供无功支撑从而促进电压恢复,提升系统暂态稳定性。针对图1所示的发电机-跟网型mmc换流站并联供电系统,发电机通过交流输电线路与跟网型mmc的并网点连接,并且二者以并联形式通过交流输电线路共同向电网传输功率;在该场景下,跟网型mmc的q轴定交流电压控制器会对发电机的阻尼特性产生影响,导致系统发生低频振荡失稳,不利于系统稳定运行。因此,需要另外研究用于与发电机并联供电系统的跟网型mmc换流站的控制策略,以实现未来用发电机-跟网型mmc并联供电系统向电网稳定可靠地供电。
技术实现要素:
5.鉴于上述,本发明提供了一种用于发电机-跟网型mmc换流站并联供电系统的控制方法,能够消除由于跟网型mmc接入引起的发电机负阻尼转矩,保证系统不会出现低频振荡失稳,具有良好的鲁棒性,同时不会影响供电系统故障期间的暂态运行特性。
6.一种用于发电机-跟网型mmc换流站并联供电系统的控制方法,对于系统中的跟网型mmc采用定交流电压和定有功功率控制策略,并在q轴外环定电压控制器中加入超前校正辅助控制环节,即首先根据发电机出现的主导低频振荡频率确定辅助控制环节提供的最大超前相位,然后根据最大超前相位确定q轴外环定电压控制器的超前时间常数、滞后时间常数以及增益常数,最后将该辅助控制环节改为并联形式,并且在附加支路上增加限幅环节,以保证跟网型mmc在故障暂态期间性能保持不变。
7.进一步地,所述q轴外环定电压控制器采用u
sref-us的结果依次经过超前校正辅助控制环节和外环pi控制器后得到mmc输出电流q轴指令值i
sqref
,进而将i
sqref
与d轴外环定功率控制器生成的mmc输出电流d轴指令值i
sdref
作为mmc内环电流控制器的参考值,其中u
sref
为并网点电压参考值,us为mmc并网点电压幅值。
8.进一步地,所述超前校正辅助控制环节的传递函数表达式如下:
[0009][0010]
其中:gc(s)为超前校正辅助控制环节的传递函数,kc为增益常数,t和βt分别为超前时间常数和滞后时间常数,β为滞后系数,s为拉普拉斯算子。
[0011]
进一步地,所述超前校正辅助控制环节由原始支路和附加控制器并联组成,即gc(s)=g
x
(s) 1,gc(s)为超前校正辅助控制环节的传递函数,g
x
(s)为附加控制器的传递函数,其表达式如下:
[0012][0013]
其中:kc为增益常数,t和βt分别为超前时间常数和滞后时间常数,β为滞后系数,s为拉普拉斯算子。
[0014]
进一步地,所述超前时间常数t、滞后系数β以及增益常数kc的计算表达式如下:
[0015][0016][0017][0018]
其中:ωc为发电机的主导振荡角频率,为最大超前相位。
[0019]
进一步地,所述最大超前相位的计算表达式如下:
[0020][0021][0022]
其中:fc为发电机的主导振荡频率,kv和tv分别为外环pi控制器的比例系数和积分
系数,为外环pi控制器在fc频率点处所提供的滞后相位。
[0023]
进一步地,所述限幅环节用于对附加控制器进行限幅,将其输出限制在-0.02p.u.至0.02p.u.之间。
[0024]
与现有技术相比,本发明具有以下有益技术效果:
[0025]
1.本发明为发电机-跟网型mmc换流站并联供电系统提供了一种可行的控制策略,能够避免由于采用无功量定交流电压控制的跟网型mmc接入系统引起的低频振荡失稳现象,保证供电系统与电网同步稳定运行,为未来工程的设计起到一定的指导作用。
[0026]
2.本发明在跟网型mmc的q轴外环控制器中引入超前校正辅助控制器,该控制器的设计只与系统出现的主导振荡频率以及mmc的q轴外环控制器参数有关,不受发电机参数以及网络参数结构影响;本发明方法不需添加额外装置,实施简单,具有良好的经济效益。
[0027]
3.当跟网型mmc的q轴外环控制器参数发生变化时,系统的主导振荡频率也会有所变化,此时保持整定好的超前校正辅助控制器参数不变,使得q轴外环控制器参数在一定范围内变化时,系统都不会出现低频振荡失稳现象;因此本发明方法鲁棒性强,适用范围广,具有极高的工程价值。
[0028]
4.当跟网型mmc的输出功率指令值发生改变时,其输出功率能够快速跟随指令值,并且保证系统不会发生低频振荡失稳;因此本发明适用性强,实际的工程意义重大。
[0029]
5.当跟网型mmc的并网母线处发生短路故障时,并联供电系统能够实现故障穿越,保证系统故障清除后恢复稳定运行,并且与未采用辅助控制策略相比,跟网型mmc的暂态特性保持不变;因此本发明实施简单,各种工况下适用性强,实际的工程意义重大。
附图说明
[0030]
图1为发电机-跟网型mmc换流站并联供电系统的拓扑结构示意图。
[0031]
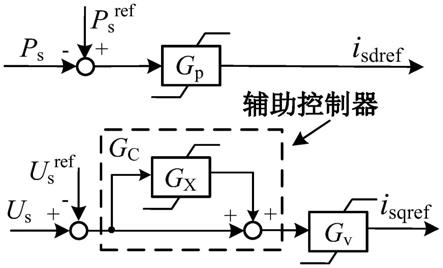
图2为本发明采用超前校正辅助控制器的跟网型mmc外环控制原理框图。
[0032]
图3为未采用辅助控制器时,改变跟网型mmc q轴外环控制器积分常数情况下发电机的转子角频率波形图。
[0033]
图4为采用本发明控制方法后在辅助控制器参数保持不变情况下q轴外环控制器参数改变时发电机的转子角频率波形图。
[0034]
图5为采用本发明控制方法后跟网型mmc换流站功率指令值发生改变情况下mmc换流站输送的功率波形图。
[0035]
图6为采用本发明控制方法后跟网型mmc换流站并网点母线处发生三相金属性接地短路故障情况下mmc的d、q轴电流波形图。
具体实施方式
[0036]
为了更为具体地描述本发明,下面结合附图及具体实施方式对本发明的技术方案进行详细说明。
[0037]
如图2所示,本发明用于发电机-跟网型mmc换流站并联供电系统控制策略,包括如下步骤:
[0038]
(1)对于跟网型mmc换流器,其无功控制环节采用改进的定交流电压控制策略,在q轴外环控制器中加入超前校正辅助控制环节。
[0039]
设定跟网型mmc的q轴外环控制器控制并网点交流母线电压幅值,且附加前馈超前校正控制器gc的传递函数形式为:
[0040][0041]
(2)对于发电机-跟网型mmc并联供电系统,首先根据发电机出现的主导低频振荡频率确定辅助控制器提供的最大超前相位。
[0042]
设不采用前馈控制时,发电机的主导振荡频率为fc,且跟网型mmc的q轴外环控制器gv的比例-积分参数常数分别为kv、tv,则跟网型mmc的q轴外环控制器gv在fc处所提供的滞后相位为:
[0043][0044]
据此确定超前校正控制器gc(s)所提供的最大超前相位为:
[0045][0046]
(3)对于跟网型mmc换流器,根据最大超前相位确定控制器的超前、滞后时间常数及增益常数。
[0047]
设超前校正控制器gc(s)的超前、滞后时间常数分别为t和βt,控制器的增益系数kc,则根据最大超前相位和主导振荡角频率ωc,分别计算参数t、β和kc:
[0048][0049][0050][0051]
(4)对于跟网型mmc换流器,采用并联形式超前校正控制器,并且在附加支路上增加限幅环节,以保证跟网型mmc在故障暂态期间性能保持不变。
[0052]
将上述计算得到的超前校正控制器gc(s)改为并联形式,两并联支路分别为原始支路和附加控制器g
x
(s),即:
[0053]
gc(s)=g
x
(s) 1
[0054][0055]
在附加控制器g
x
(s)上设置限幅环节,其最大输出和最小输出限制在0.02p.u.和-0.02p.u.,从而保证在系统发生严重故障时,g
x
(s)将很快的达到限幅值。
[0056]
将外环电压控制器输出的结果作为mmc内环电流控制器的参考值,内环电流控制器设计方法与传统mmc的内环电流控制器基本相同,mmc内环电流限幅环节的最大输出和最小输出可以限制在1.2p.u.和-1.2p.u.附近。
0.02p.u.。将外环电压控制器输出的结果作为mmc内环电流控制器的参考值,内环电流控制器设计方法与传统mmc的内环电流控制器基本相同,mmc内环电流限幅环节的最大输出和最小输出限制在1.2p.u.和-1.2p.u.附近。
[0065]
(3)采用传统控制策略的情况下,跟网型mmc采用d轴外环控制器定有功功率,q轴外环控制器定并网点交流电压幅值的控制方式,此时改变mmc定q轴外环控制器的积分常数tv分别为0.01,0.03和0.15,发电机的转子角频率波形如图3所示。
[0066]
(4)采用本发明控制策略的情况下,跟网型mmc的q轴外环控制器中加入超前校正辅助控制,控制器参数按(1)-(2)所述整定。此时改变mmc的q轴外环控制器的积分常数tv分别为0.03、0.05和0.15,并与采用传统控制策略且tv=0.05时的跟网型mmc作对比,发电机的转子角频率波形如图4所示。
[0067]
(5)采用本发明控制策略的情况下,对于功率阶跃的仿真。在第10s时设定跟网型mmc的功率指令值由0.5p.u.跃升为0.55p.u.,并且在第12s时设定mmc的功率指令值由0.55p.u.下降为0.5p.u.,功率基准值选为400mw,得到mmc实际输出功率波形如图5所示。
[0068]
(6)采用本发明控制策略的情况下,对于故障的仿真,设定跟网型mmc并网点处发生三相金属性接地短路故障,故障持续时间0.1s;与采用传统控制策略的跟网型mmc对比,其输出电流的d、q轴分量标幺值波形如图6所示。
[0069]
对上述实例,由图3和图4可以看出,当采用传统控制方式时,发电机转子会出现低频振荡现象,当tv为0.03、0.05和0.15时,发电机的阻尼转矩为负,系统会出现低频振荡失稳。而跟网型mmc采用本发明控制策略时,发电机的阻尼转矩由负变正,系统不会出现低频振荡失稳现象,证明了本发明所采用的辅助控制策略在抑制系统低频振荡方面的有效性。并且图4的仿真结果说明,在采用整定好并保持不变的超前校正辅助控制器参数情况下,跟网型mmc的q轴外环控制器参数在一定范围内改变,采用辅助控制策略都能避免系统发生低频振荡失稳,从而说明了本发明控制方法具有良好的鲁棒性和适应性。图5的仿真结果说明,在mmc功率指令值发生变化时,其输出功率能够无偏差跟踪指令值,响应特性迅速,并且能够保持系统稳定运行。图6的仿真结果说明,发电机-跟网型mmc并联供电系统能够穿越最严重的三相金属性接地短路故障,并且可以看出,采用传统控制方法和本发明控制策略的mmc在故障暂态期间响应特性几乎相同,说明了本发明所采用的辅助控制策略不会影响系统故障暂态期间的响应特性。以上各仿真结果说明了本发明的有效性。
[0070]
上述对实施例的描述是为便于本技术领域的普通技术人员能理解和应用本发明。熟悉本领域技术的人员显然可以容易地对上述实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,对于本发明做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。