技术特征:
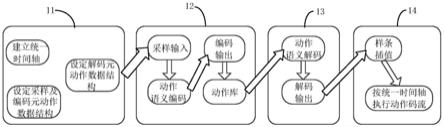
1.一种仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,包括:建立统一基准时间轴,以及设定采样及编码元动作数据结构和解码元动作数据结构;对各个执行器按照采样及编码元动作数据结构进行数据采样;对采样点按照动作语义进行编码,编码完成后输出编码并存入动作库;在机器人运动时先从所述动作库取出动作编码流,并对动作编码流进行解码;解码后再采用动作平滑算法计算出连续动作编码流,再将连续动作编码流各个动作点按照解码元动作数据结构进行填充;输出解码动作编码流并按照统一时间轴执行解码动作编码流。2.如权利要求1所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,采样及编码元动作数据结构表示为s=[id,t,r];其中,s表示采样和编码数据结构,id表示执行器编号,t表示执行器运行到当前角度的时间点,r表示执行器当前角度。3.如权利要求2所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,解码元动作数据结构表示为a=[id,t,r,v,a];其中,a表示解码元动作,id表示执行器编号,t表示执行器运行到当前角度的时间点,r表示执行器当前角度,v表示执行器当前转速,a表示执行器当前加速度。4.如权利要求3所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,还包括设定机器人运动时的联合元动作数据结构:b=[t,an];其中,b表示联合动作,t表示联合动作的统一时间轴,an表示n个执行器的当前信息。5.如权利要求4所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,对采样点按照动作语义进行编码,包括:设定统一基准时间轴;将联合动作分割为n个区间段动作;将最长时间动作点的执行器时间设置为联合动作的结束时间;每个执行器按照元动作a对每个区间段动作在t
n
时间点进行数据填充,t
n
表示时间轴t上第n个区间段,n为自然数1~n;按照联合动作b填充所有执行器在t
n
时间点的信息;判断联合动作的结束时间点:若编码动作结束,则输出动作编码流;否则返回继续填充元动作a,直至编码动作结束。6.如权利要求5所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,对动作编码流进行解码,包括:设定统一基准时间轴;从动作库读取所有联合动作编码流;取出t
n
时间点动作编码流;根据动作编码流采用动作平滑算法计算完整连续平滑动作点;执行t
n
时间点动作编码流;判断联合动作的结束时间点:若解码动作结束,则停止执行执行器;若解码未结束,则返回继续取下一个时间点动作编码流,直到解码动作结束。7.如权利要求5所述的仿人实体机器人的连续动作语义编码与翻译方法,其特征在于,所述动作平滑算法采用样条插值算法。
8.一种仿人实体机器人的连续动作语义编码与翻译系统,其特征在于,所述系统被处理器执行时实现如权利要求1至7中任一项所述的仿人实体机器人的连续动作语义编码与翻译方法。9.如权利要求8所述的仿人实体机器人的连续动作语义编码与翻译系统,其特征在于,包括:搭构模块,用于建立统一基准时间轴,以及设定采样及编码元动作数据结构和解码元动作数据结构;采样模块,用于对各个执行器按照采样及编码元动作数据结构进行数据采样,对采样点按照动作语义进行编码,编码完成后输出编码并存入动作库;解码模块,用于在机器人运动时先从所述动作库取出动作编码流,并对动作编码流进行解码;执行模块,用于解码后再采用动作平滑算法计算出连续动作编码流,再将连续动作编码流各个动作点按照解码元动作数据结构进行填充,输出解码动作编码流并按照统一时间轴执行解码动作编码流。
技术总结
本发明公开了一种仿人实体机器人的连续动作语义编码与翻译方法及系统,方法包括:建立统一基准时间轴,以及设定采样及编码元动作数据结构和解码元动作数据结构;对各个执行器按照采样及编码元动作数据结构进行数据采样;对采样点按照动作语义进行编码,编码完成后输出编码并存入动作库;在机器人运动时先从动作库取出动作编码流,并对动作编码流进行解码;解码后再采用动作平滑算法计算出连续动作编码流,再将连续动作编码流各个动作点按照解码元动作数据结构进行填充;输出解码动作编码流并按照统一时间轴执行解码动作编码流。实现仿人机器人的各个关节在同一时间点上独立运动,最终整体效果上即可实现仿人机器人的联动动作。作。作。
技术研发人员:王磊 李龙
受保护的技术使用者:上海清芸机器人有限公司
技术研发日:2021.12.30
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。