1.本发明涉及润滑油罐体参数自动识别领域,具体涉及基于图像处理的润滑油罐体参数自动识别方法。
背景技术:
2.润滑油罐装机是用于润滑油灌装的设备。灌装机在灌装润滑油的时候需要人为给定灌装量和灌装头高度等参数,以便适用于不同的罐体。传统方法给定参数需要操作员识别罐体型号,根据罐体型号确定罐体参数,识别需要依靠操作员的经验。但是,这种方法较大程度上依赖人工,存在效率较低的问题。
技术实现要素:
3.为了解决现有方法获取润滑油罐体参数时存在的效率较低的问题,本发明的目的在于提供一种基于图像处理的润滑油罐体参数自动识别方法,所采用的技术方案具体如下:本发明提供了一种基于图像处理的润滑油罐体参数自动识别方法,该方法包括以下步骤:获取在不同周期的正弦结构光照射下的待识别罐体图像和参考图像;根据各周期的正弦结构光照射下的待识别罐体图像和参考图像中各像素点的灰度值,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量;根据所述各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量,得到待识别罐体图像中各像素点的周期偏离量;根据所述待识别罐体图像中各像素点的周期偏离量,得到待识别罐体图像中各像素点对应的正弦结构光的最优周期;根据待识别罐体图像中各像素点对应的最优周期的正弦结构光,得到待识别罐体的三维模型,根据所述待识别罐体的三维模型,得到待识别罐体的参数。
4.优选的,所述根据各周期的正弦结构光照射下的待识别罐体图像和参考图像中各像素点的灰度值,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量,包括:获取各周期的正弦结构光照射下的待识别罐体图像中各像素点对应的垂向灰度序列;获取各周期的正弦结构光照射下的参考图像中各像素点对应的垂向基准灰度序列;根据各周期的正弦结构光照射下的待识别罐体图像中各像素点对应的垂向灰度序列和各周期的正弦结构光照射下的参考图像中各像素点对应的垂向基准灰度序列,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的垂向形变量;获取各周期的正弦结构光照射下的待识别罐体图像中各像素点对应的切向灰度序列;获取各周期的正弦结构光照射下的参考图像中各像素点对应的切向基准灰度序列;根据各周期的正弦结构光照射下的待识别罐体图像中各像素点对应的切向灰度序列和各周期的正弦结构光照射下的参考图像中各像素点对应的切向基准灰度序列,计算各周期的
正弦结构光照射下的待识别罐体图像中各像素点的切向形变量;根据所述各周期的正弦结构光照射下的待识别罐体图像中各像素点的垂向形变量和切向形变量,得到待识别罐体图像中各像素点的形变量。
5.优选的,采用如下公式计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的垂向形变量:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点对应的垂向形变量,为该像素点对应的垂向灰度序列的偏度,为该像素点对应的垂向基准灰度序列的偏度,为该像素点对应的垂向灰度序列的熵,为该像素点对应的垂向基准灰度序列的熵。
6.优选的,采用如下公式计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的切向形变量:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点对应的切向灰度序列的峰度,为该像素点对应的切向基准灰度序列的峰度,为该像素点对应的切向灰度序列与切向基准灰度序列的dtw距离。
7.优选的,所述根据所述各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量,得到待识别罐体图像中各像素点的周期偏离量,包括:根据各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量,采用聚类算法对各周期的正弦结构光照射下的待识别罐体图像对应的样本集进行聚类,得到各周期的正弦结构光照射下的待识别罐体图像对应的各簇;根据各周期的正弦结构光照射下的待识别罐体图像中各像素点周围设定个数像素点形变量的极差和各像素点到其所在的簇的中心点的欧氏距离,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的平缓程度;根据各周期的正弦结构光照射下的待识别罐体图像中各像素点周围设定个数像素点形变量的方差和各像素点到各边界点的最小距离,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的剧烈程度;所述各边界点为待识别罐体图像中各像素点所在簇的中心点与其它簇的中心点连线的中点;根据所述各周期的正弦结构光照射下的待识别罐体图像中各像素点的平缓程度和剧烈程度,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的周期偏离量。
8.优选的,采用如下公式计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的周期偏离量:
其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点的周期偏离量,为该像素点的平缓程度,为该像素点的剧烈程度,为该像素点到待识别罐体图像边界的距离,为该像素点到待识别罐体图像中心的距离,为剧烈程度系数,为平缓程度系数,为自然常数。
9.优选的,所述根据待识别罐体图像中各像素点对应的最优周期的结构光,得到待识别罐体的三维模型,包括:采用不同周期的正弦结构光照射待识别罐体,得到各周期的正弦结构光照射下的待识别罐体图像中各像素点的相对高度,提取待识别罐体上各像素点在最优周期的正弦结构光照射下的相对高度;根据待识别罐体上各像素点在最优周期的正弦结构光照射下的相对高度,得到待识别罐体的三维模型。
10.本发明具有如下有益效果:本发明根据待识别罐体上各像素点在不同周期的正弦结构光照射下的形变量,计算了待识别罐体上各像素点的周期偏离量,根据待识别罐体上各像素点的周期偏离量,得到待识别罐体上各像素点对应的正弦结构光的最优周期。待识别罐体的形状不一,不同区域可能会呈现不同的变化规律,本发明针对待识别罐体上各像素点选择最优周期的正弦结构光,使得获取的待识别罐体的模型更加准确,提高了罐体参数的识别精度,同时,也提高了识别效率。
附图说明
11.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
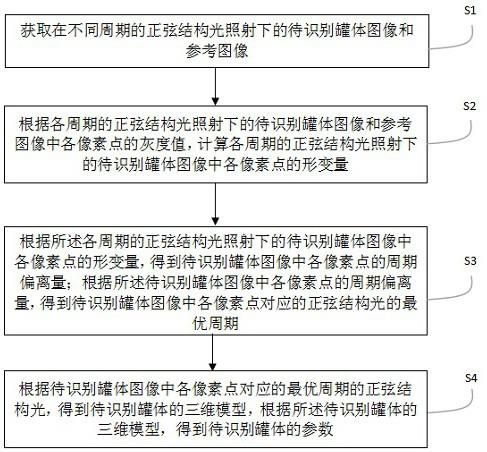
12.图1为本发明一个实施例所提供的一种基于图像处理的润滑油罐体参数自动识别方法的流程图。
具体实施方式
13.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种基于图像处理的润滑油罐体参数自动识别方法进行详细说明如下。
14.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
15.下面结合附图具体的说明本发明所提供的一种基于图像处理的润滑油罐体参数自动识别方法的具体方案。
16.基于图像处理的润滑油罐体参数自动识别方法实施例现有方法获取润滑油罐体参数存在效率较低的问题。为了解决上述问题,本实施例提出了基于图像处理的润滑油罐体参数自动识别方法,如图1所示,本实施例的基于图像处理的润滑油罐体参数自动识别方法包括以下步骤:
步骤s1,获取在不同周期的正弦结构光照射下的待识别罐体图像和参考图像。
17.本实施例针的具体应用场景:未罐装润滑油之前的罐体。
18.对于未罐装润滑油的罐体,为了实现自动化罐装润滑油,提高罐装效率,本实施例需要先确定罐体的型号,不同型号的罐体的体积可能不同,不同型号的罐体的形状可能也不同,根据罐体的型号确定罐体的参数,根据罐体的参数调节灌装机的参数,例如导流板的角度,每次释放润滑油的体积等。同一批次的罐体只需要检测一次。
19.本实施例使用不同周期的正弦结构光照射待识别罐体,利用相机采集不同周期的结构光照射下待识别罐体的图像,将相机采集到的不同周期的结构光照射下待识别罐体的图像进行灰度化处理,得到不同周期的结构光照射下待识别罐体的灰度图。
20.具体的,利用不同周期的正弦结构光正射罐体,结构光源所投影的周期取值范围为,可以根据实际情况调整,是结构光源所能投影的最小周期,其值为36,的值为360,在具体应用中,和的值可根据实际需要调整。相机的光轴与结构光源形成一定的角度,以保证相机采集到的待识别罐体图像中的相位信息能够凸显罐体的高度,本实施例中设置该角度为10
°
,在具体应用中,实施者根据实际需要自行设定。正弦结构光需要一个参考平面,因此本实施例在罐体后方设置一个与待识别罐体的颜色相近的参考平面,尽可能的排除颜色对后续处理的干扰,对待识别罐体,在周期取值范围内改变结构光光源的周期,每次改变的周期间隔为2,每一个周期下,相机采集一张待识别罐体图像,即相机采集了不同周期结构光照射下共n张的待识别罐体图像;将待识别罐体图像按照周期序号编号,即光源周期为时采集到待识别罐体图像记为第i张图像。同时,获取参考平面与待识别罐体同周期的结构光源照射下的投影图像,得到n张参考图像。将n张的待识别罐体图像进行灰度化处理,得到n张的待识别罐体的灰度图。将n张参考图像进行灰度化处理,得到n张参考图像的灰度图。
21.步骤s2,根据各周期的正弦结构光照射下的待识别罐体图像和参考图像中各像素点的灰度值,计算各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量。
22.现有技术应用正弦结构光对图像进行处理,一般是根据经验值设置一个结构光源周期,本实施例考虑到同一个罐装机能罐装的罐体有各种各样的型号,每种型号的尺寸形状不同,同一个周期的结构光无法适应一个罐体上的所有位置,同一个周期的结构光无法适应所有型号的罐体,基于一个周期的结构光获得的罐体模型会不准确。因此,本实施例获取待识别罐体上各像素点的形变量,后续根据待识别罐体上各像素点的形变量得到各像素点的最优周期,基于待识别罐体上各像素点在最优周期的正弦结构光照射下的投影图像得到待识别的罐体的准确模型。
23.原始正弦结构光上,相位是按照正弦规律变化的,而当正弦结构光打到罐体上再被相机获取到图像中时,罐体的高度变化越剧烈,图像中的结构光就越被扭曲,本来相位是按照正弦规律变化的,现在受到高度影响并不按照正弦规律变化了。待识别罐体上像素点相位的变化规律,偏离规律正弦的程度越大,形变量就越大。
24.获取每个周期的结构光照射下待识别罐体图像中各像素点的形变量的方法如下:对每张待识别罐体图像,在图像上的每个像素点,获取该像素点处的海森矩阵,得到海森矩阵的特征向量和特征值,获取最大特征值对应的特征向量和最小特征值对应的
特征向量。和是二维单位向量,表征过该像素点垂直于正弦结构光条纹的方向,表征过该像素点平行于正弦结构光条纹的方向。
25.本实施例计算每张罐体图像中各像素点的垂向形变量和切向形变量,根据各像素点的垂向形变量和切向形变量,计算每张罐体图像中各像素点的周期偏离量。所述垂向形变量为垂直于正弦结构光条纹方向的形变程度,切向形变量为平行于正弦结构光条纹方向的形变程度。
26.具体的,对于每张罐体的图像中各像素点,以该像素点为中心,取其方向上k个像素点和反方向上k个像素点,将这些像素点作为该像素点对应的垂向像素点,根据该像素点对应的垂向像素点的灰度值,构建每张罐体图像中各像素点对应的垂向灰度序列。对同一周期的正弦结构光照射下的参考图像,获取与待识别罐体图像上的像素点对应的像素点在方向上k个像素点和反方向上k个像素点,将这些像素点作为待识别罐体图像上的该像素点对应的垂向基准像素点,根据该像素点对应的垂向基准像素点的灰度值,构建每张罐体图像中各像素点对应的垂向基准灰度序列。本实施例设置k的值为5,在具体应用中,实施者根据实际需要进行调整。本实施例用每张罐体图像中各像素点对应的垂向灰度序列与垂向基准灰度序列的偏度差和熵的差值表征每张罐体图像中各像素点的垂向形变量,偏度差越大,该像素点的垂向形变量越大;熵的差值越大,该像素点的垂向形变量越大。每个像素点的垂向形变量的具体计算公式为:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点对应的垂向形变量,为该像素点对应的垂向灰度序列的偏度,为该像素点对应的垂向基准灰度序列的偏度,为该像素点对应的垂向灰度序列的熵,为该像素点对应的垂向基准灰度序列的熵。
27.对于每张待识别罐体图像中各像素点,以该像素点为中心,取其方向上k个像素点和反方向上k个像素点,将这些像素点作为该像素点对应的切向像素点,根据该像素点对应的切向像素点的灰度值,构建每张罐体图像中各像素点对应的切向灰度序列。对同周期的正弦结构光照射下的参考图像,获取与待识别罐体图像上的像素点对应的像素点在方向上k个像素点和反方向上k个像素点,将这些像素点作为待识别罐体图像上像素点对应的切向基准像素点,根据该像素点对应的切向基准像素点的灰度值,构建每张罐体图像中各像素点对应的切向基准灰度序列。本实施例用每张罐体图像中各像素点对应的切向灰度序列与切向基准灰度序列的峰度差和dtw距离表征每张罐体图像中各像素点的切向形变量,峰度差越大,该像素点的切向形变量越大;dtw距离越大,该像素点的切向形变量越大。每个像素点的切向形变量的具体计算公式为:
其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点对应的切向灰度序列的峰度,为该像素点对应的切向基准灰度序列的峰度,为该像素点对应的切向灰度序列与切向基准灰度序列的dtw距离。
28.本实施例用各周期的正弦结构光照射下的待识别罐体图像中每个像素点的垂向形变量和切向形变量表征各周期的正弦结构光照射下待识别罐体图像中每个像素点的形变量,具体计算公式为:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点的形变量。
29.步骤s3,根据所述各周期的正弦结构光照射下的待识别罐体图像中各像素点的形变量,得到待识别罐体图像中各像素点的周期偏离量;根据所述待识别罐体图像中各像素点的周期偏离量,得到待识别罐体图像中各像素点对应的正弦结构光的最优周期。
30.在每张待识别罐体图像中,以每个像素点所在的行x、所在的列y以及该像素点的形变量共同构成每个像素的描述向量,其中,为第个像素点的描述向量,为第个像素点所在行的行号,为第个像素点所在列的列号。根据每个周期的正弦结构光照射下的待识别罐体图像中的所有像素点的描述向量构建样本集,采用均值漂移聚类算法对同一张图像的样本集进行聚类,得到多个簇,每个簇内像素点的形变量相似且距离较近,即每个簇表示待识别罐体图像中形变量相似的一个局部区域。
31.本实施例根据不同周期的正弦结构光照射下的待识别罐体图像中每个像素点的形变量,计算每个像素点的平缓程度和剧烈程度,平缓程度反映每个像素点与其周围像素点变化的平稳程度,剧烈程度反映每个像素点与其周围像素点变化的波动程度;根据每个像素点的平缓程度和剧烈程度,计算每个像素点的周期偏离量;根据每个像素点的周期偏离量,得到待识别罐体上每个像素点适应的结构光的最优周期。
32.具体的,对于第个周期的正弦结构光照射下的待识别罐体图像,以每个像素点为中心,建立一个k
×
k的关注窗口,本实施例设置k的值为9,在具体应用中,根据实际需要进行设置;获取每个像素点对应的关注窗口内所有像素点形变量的极差,极差越大,当前像素点的平缓程度越低;同时获取每个像素点到其所在簇的中心点的欧式距离,欧式距离越大,当前像素点的平缓程度越低。本实施例用每个像素点的周围像素点形变量的极差和每个像素点到其所在簇的中心点的欧式距离表征每个像素点在该周期的正弦结构光照射下的平缓程度。第个周期的正弦结构光照射下的待识别罐体图像中每个像素点的平缓程度的计算公式为:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点的
平缓程度,为该像素点在其对应的关注窗口内的所有像素点形变量的极差,为该像素点到其所在簇的中心的欧式距离。
33.本实施例获取每个像素点对应的关注窗口内所有像素点形变量的方差,方差越大,当前像素点的剧烈程度越大;将上述方法中得到的每个簇的中心点与其它簇的中心点连线的中点记为边界点,每张图像得到多个边界点。获取第个周期的正弦结构光照射下的待识别罐体图像中每个像素点到各边界点的最小距离,每个像素点到各边界点的最小距离越小,当前像素点的剧烈程度越高;本实施例用每个像素点的周围像素点形变量的极差和每个像素点到各边界点的最小距离表征每个像素点在该周期的正弦结构光照射下的剧烈程度。第个周期的正弦结构光照射下的待识别罐体图像中每个像素点的剧烈程度的计算公式为:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点的周期偏离量,为当前像素点在其对应的关注窗口内的所有像素点形变量的方差,为当前像素点到边界点的最小距离。
34.本实施例用各周期的正弦结构光照射下的待识别罐体图像中各像素点的平缓程度和剧烈程度表征各周期的正弦结构光照射下的待识别罐体图像中各像素点的周期偏离量。具体计算偏离量的公式为:其中,为第个周期的正弦结构光照射下的待识别罐体图像中第个像素点的周期偏离量,为该像素点的平缓程度,为该像素点的剧烈程度,为该像素点到待识别罐体图像边界的距离,为该像素点到待识别罐体图像中心的距离,为剧烈程度系数,为平缓程度系数,为自然常数。
35.周期大的正弦结构光适用于局部变化较剧烈的像素点,一个像素点与其周围像素点变化的剧烈程度越大,越应当选择较大周期的正弦结构光;周期小的正弦结构光适用于局部变化较平缓的像素点,一个像素点与其周围像素点变化的平稳程度越大,越应当选择较小周期的正弦结构光,这样可以更清晰的观测到图像局部的变化情况。本实施例当像素点的偏离量大于0时,说明该像素点更加剧烈,应选择比当前周期大的周期的正弦结构光照射该像素点;当像素点的偏离量小于0时,说明该像素点更加平稳,应选择比当前周期小的周期正弦结构光照射该像素点。本实施例将每个像素点的偏离量绝对值最小时对应的正弦结构光的周期作为每个像素点适应的正弦结构光的最优周期。
36.至此,得到待识别罐体上每个像素点适应的正弦结构光的最优周期。
37.步骤s4,根据待识别罐体图像中各像素点对应的最优周期的正弦结构光,得到待识别罐体的三维模型,根据所述待识别罐体的三维模型,得到待识别罐体的参数。
38.本实施例采用ftp的方法获取每张图像上各像素点的截断相位,再采用质量图导向法解包裹获得各像素点连续相位,根据连续相位-高度映射关系得到每张待识别罐体图
像中每个像素点的相对高度,该相对高度为像素点到相机的距离。ftp、质量图导向法解包裹均为公知技术,此处不再赘述。
39.本实施例在步骤s3中得到了待识别罐体上每个像素点适应的正弦结构光的最优周期,提取待识别罐体上每个像素点在最优周期的结构光照射下的相对距离,根据待识别罐体上每个像素点在最优周期的结构光照射下的相对距离,进行待识别罐体模型的三维重建,得到待识别罐体的三维模型。三维重建为公知技术,此处不再赘述其原理。
40.根据待识别罐体的三维模型,在罐体模型库中找到与待识别罐体匹配的模型,获取该模型的型号,根据型号得到待识别润滑油罐体参数,根据待识别润滑油罐体参数设置罐装机参数,以适应当前罐体。
41.本实施例根据待识别罐体上各像素点在不同周期的正弦结构光照射下的形变量,计算了待识别罐体上各像素点的周期偏离量,根据待识别罐体上各像素点的周期偏离量,得到待识别罐体上各像素点对应的正弦结构光的最优周期。待识别罐体的形状不一,不同区域可能会呈现不同的变化规律,本实施例针对待识别罐体上各像素点选择最优周期的正弦结构光,使得获取的待识别罐体的模型更加准确,提高了罐体参数的识别精度,同时,也提高了识别效率。
42.需要说明的是:以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。