1.本发明属于精密仪器及机械技术领域,特别是涉及一种基于拉线式机构的机械复眼旋转驱动装置。
背景技术:
2.光刻机是芯片制造工艺设备中实现纳米级晶体元件加工的核心装置,同时也是众多芯片制造设备中科技含量最高,研发难度最大的设备。光刻机涵盖大量子系统,其中照明系统负责将入射光源进行分光与导向,以实现光源在掩膜系统中期望的光强分布。因而照明系统更精细准确的分光能力对光刻工艺的提升有至关重要的影响。
3.机械复眼由若干个能独立运动的复眼单元组成,被认为具备代替传统照面系统,以满足更复杂光源分布需求的潜力。在光刻过程中,需要每个复眼单元具备至少两个自由度的旋转自由度以实现自由式的光源分布调整。此外,考虑到光刻机是集成度极高的设备,因而,在有限的空间内实现照明器系统集成与运动功能是复眼机构设计的难点。
4.照明系统通常包括驱动模块、运动导向模块与实时测控模块,其中实时测控模块的集成研究已较为充分,如何对照明器的驱动模块与运动导向模块进行进一步结构简化,是照明系统集成的研究方向。采用拉线式机构可以在实现驱动复眼单元多自由运动的同时,简化运动导向模块,是新型照明系统设计的一种新方式,并具有较高可行性。
技术实现要素:
5.有鉴于此,本发明旨在提出一种基于拉线式机构的机械复眼旋转驱动装置,以解决现有机械复眼集成度低,难以对光路精准导向的问题。
6.为实现上述目的,本发明采用以下技术方案:一种基于拉线式机构的机械复眼旋转驱动装置,它包括机架、水平致动器、垂直致动器、张紧装置、球铰和光学元件,所述光学元件通过球铰与机架上端铰接相连,所述水平致动器设置在机架的底部中心位置,所述水平致动器与拉线相连,所述水平致动器带动拉线运动,所述拉线两侧分别穿过张紧装置后,拉线的两端与光学元件长度方向的两端相连,所述垂直致动器固定在机架的中部,所述垂直致动器两侧分别与两个拉杆相连,通过垂直致动器驱动两个拉杆运动,所述两个拉杆的上端与光学元件宽度方向的两侧相连。
7.更进一步的,所述张紧装置包括安装支脚、滑轨、滑块和张紧轮,所述滑轨设置在安装支脚上,所述滑块与滑轨滑动配合相连,所述张紧轮与滑块铰接相连,所述拉线与张紧轮配合相连。
8.更进一步的,所述张紧装置还包括螺杆和调整旋钮,所述滑块中间加工有螺纹孔,所述螺杆穿过安装支脚与滑块上的螺纹孔配合相连,所述螺杆上端与调整旋钮相连。
9.更进一步的,所述水平致动器包括水平致动器定子和拉线连接头,所述水平致动器定子设置在机架的底部中心位置,所述拉线连接头与水平致动器定子滑动连接,所述拉线与拉线连接头固定相连。
10.更进一步的,所述拉线穿过拉线连接头,所述拉线通过第一松紧螺母与拉线连接头固定。
11.更进一步的,所述垂直致动器包括垂直致动器定子、垂直致动器动子和铰接拉线接头,所述垂直致动器定子固定在机架的中部,所述垂直致动器动子与垂直致动器定子铰接相连,所述垂直致动器动子两端分别设有两个铰接拉线接头,所述两个铰接拉线接头通过第二松紧螺母分别与两个拉杆相连。
12.更进一步的,所述球铰包括球轴座和定心球轴,所述球轴座安装在机架上,所述定心球轴与球轴座铰接相连,所述定心球轴上端与光学元件相连,所述定心球轴为完整球体切割形成,具有一个虚拟旋转中心。
13.更进一步的,所述拉线所确定的平面与拉杆所确定的平面相交于一线,相交线与机架的中垂线重合并穿过虚拟旋转中心。
14.更进一步的,所述光学元件包括微型镜面、镜面安装座、刚性拉线连接头和铰接拉线连接头,所述微型镜面粘接在镜面安装座上,所述刚性拉线连接头沿长度方向设置在镜面安装座的两端,所述铰接拉线连接头沿宽度方向设置在镜面安装座的两侧,所述刚性拉线连接头和铰接拉线连接头上均设置有拉线松紧螺母。
15.更进一步的,所述两个拉杆的两端加工成具备柔性特征的结构。
16.与现有技术相比,本发明的有益效果是:本发明用于在实现照明器两个方向旋转运动同时保证机构具有较高对集成度,从而实现照明机构对光路对精准导向功能。本发明提供一种占用空间小,机构简单的多自由度驱动装置。通过两组拉线机构,水平致动器和垂直致动器分别带动光学元件绕两个互相正交的轴旋转。在机械复眼单元工作时,利用铰接拉线连接头的铰接特性保证垂直致动器驱动的拉杆结构不受由水平致动器输出的干涉。
附图说明
17.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
18.图1为本发明所述的一种基于拉线式机构的机械复眼旋转驱动装置结构示意图;
19.图2为本发明所述的水平致动器结构示意图;
20.图3为本发明所述的垂直致动器结构示意图;
21.图4为本发明所述的张紧装置结构示意图;
22.图5为本发明所述的球铰结构示意图;
23.图6为本发明所述的光学元件结构示意图。
24.1-机架,21-水平致动器,211-水平致动器定子,212-拉线连接头,213-第一松紧螺母,214-拉线,22-垂直致动器,221-垂直致动器定子,222-垂直致动器动子,223-铰接拉线接头,224-第二松紧螺母,225-拉杆,3-张紧装置,31-安装支脚,32-滑轨,33-滑块,34-螺杆,35-调整旋钮,36-张紧轮,4-球铰,41-球轴座,42-定心球轴,43-虚拟旋转中心,5-光学元件,51-微型镜面,52-镜面安装座,53-刚性拉线连接头,54-铰接拉线连接头,55-拉线松紧螺母。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
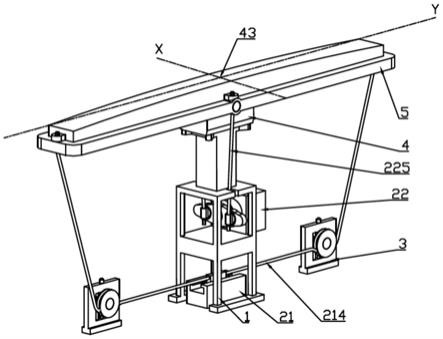
26.参见图1-6说明本实施方式,一种基于拉线式机构的机械复眼旋转驱动装置,它包括机架1、水平致动器21、垂直致动器22、张紧装置3、球铰4和光学元件5,光学元件5通过球铰4与机架1上端铰接相连,水平致动器21设置在机架1的底部中心位置,水平致动器21与拉线214相连,水平致动器21带动拉线214运动,拉线214两侧分别穿过张紧装置3后,拉线214的两端与光学元件5长度方向的两端相连,垂直致动器22固定在机架1的中部,垂直致动器22两侧分别与两个拉杆225相连,通过垂直致动器22驱动两个拉杆225运动,两个拉杆225的上端与光学元件5宽度方向的两侧相连。
27.张紧装置3包括安装支脚31、滑轨32、滑块33和张紧轮36,滑轨32设置在安装支脚31上,滑块33与滑轨32滑动配合相连,张紧轮36与滑块33铰接相连,拉线214与张紧轮36配合相连,张紧装置3还包括螺杆34和调整旋钮35,滑块33中间加工有螺纹孔,螺杆34穿过安装支脚31与滑块33上的螺纹孔配合相连,螺杆34上端与调整旋钮35相连。在初始状态下,水平致动器21和垂直致动器22的输出均为零,分别调整两侧张紧装置,使拉线拉直并保证光学元件无偏转。
28.水平致动器21包括水平致动器定子211和拉线连接头212,水平致动器定子211设置在机架1的底部中心位置,拉线连接头212与水平致动器定子211滑动连接,拉线214与拉线连接头212固定相连,拉线214穿过拉线连接头212,拉线214通过第一松紧螺母213与拉线连接头212固定。垂直致动器22包括垂直致动器定子221、垂直致动器动子222和铰接拉线接头223,垂直致动器定子221固定在机架1的中部,垂直致动器动子222与垂直致动器定子221铰接相连,垂直致动器动子222两端分别设有两个铰接拉线接头223,两个铰接拉线接头223通过第二松紧螺母224分别与两个拉杆225相连。通过水平致动器21和垂直致动器22分别带动光学元件5绕两个互相正交的轴旋转,例如rx,ry。
29.球铰4包括球轴座41和定心球轴42,球轴座41安装在机架1上,定心球轴42与球轴座41铰接相连,定心球轴42上端与光学元件5相连,定心球轴42为完整球体切割形成,具有一个虚拟旋转中心43。虚拟旋转中心43的位置根据工艺要求而定,也可以实在定心球轴实体内部。拉线214所确定的平面与拉杆225所确定的平面相交于一线,相交线与机架1的中垂线重合并穿过虚拟旋转中心43。
30.光学元件5包括微型镜面51、镜面安装座52、刚性拉线连接头53和铰接拉线连接头54,微型镜面51粘接在镜面安装座52上,刚性拉线连接头53沿长度方向设置在镜面安装座52的两端,铰接拉线连接头54沿宽度方向设置在镜面安装座52的两侧,刚性拉线连接头53和铰接拉线连接头54上均设置有拉线松紧螺母55。刚性拉线连接头53和铰接拉线连接头54中心连线交点与虚拟旋转中心43确定的线垂直于微型镜面51表面。在机械复眼单元工作时,利用铰接拉线连接头54的铰接特性保证垂直致动器22驱动的拉杆225结构不受由水平致动器21输出的干涉。
31.两个拉杆225的两端加工成具备柔性特征的结构。在配合垂直致动器22输出旋转的同时,限制光学元件5绕中垂线的旋转自由度。
32.以上公开的本发明实施例只是用于帮助阐述本发明。实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。