1.本发明涉及一种自适应小波包降噪(wpd)的机械状态监测方法,主要应用于植保无人机的喷雾作业飞行姿态监测。
背景技术:
2.植保无人机在喷雾作业过程中,其飞行姿态对喷雾效果的好坏有着非常重要的影响。因此对其喷雾作业的飞行姿态监测的研究具有重要的价值意义。对各种设备的状态监测方法有很多,但此类设备大多数价格昂贵,环境适应性差,对工况环境要求较高。而利用声信号对设备工作状态监测可以克服这些不利因素。本发明提出一种利用声信号对植保无人机喷雾飞行态监测的方法。
3.由于在植保无人机的工作环境中,干扰噪声较多,因此利用声信号对植保无人机避飞行态监测的最为关键的步骤就是信号降噪。降噪的方法有很多,其中小波包降噪应用最为广泛。传统的小波包变换具有一定的降噪能力,但是对于在复杂的噪声环境中工作的植保无人机,传统的小波包降噪技术仍然存在一些缺陷。例如纯高斯分布噪声在测量带宽的所有频率上表现出恒定的方差,这在植保无人机的喷雾作业环境中是不适当的假设。此外,由于大量的参数(例如小波函数、分解级别、阈值选择方法等),而对于这些参数的选定没有一个确切的方法。本发明设计了一个可复制的算法,以帮助选择适当的参数,以适应各植保无人机在带宽变化不均匀的噪声环境下的喷雾作业飞行姿态监测。
技术实现要素:
4.本发明的目的在于提出一种自适应的wpd算法,去克服无人机在带宽变化不均匀的噪声环境下的飞行姿态监测。
5.为了实现上述目的,本发明的采用了以下技术方案:
6.步骤1、植保无人机飞行姿态的带噪声信号采集;
7.步骤2、采用自适应wpd算法对数据进行去噪,以去除数据中包含的噪声污染和dc分量;
8.步骤3、使用welch’s方法估计每个采集信号块的声学特性,以帮助减少频谱泄漏,其中welch’s方法为:
[0009][0010]
在公式中,psd[f](w/hz)表示第n点频率为f(hz)处的功率谱密度估计值,n表示离散信号的长度,n表示信号进行傅里叶变换的离散点,δt表示采样周期,f表示采样频率,h[n]表是一个窗函数,x[n](pa)表是采集的时域信号;
[0011]
步骤4、在步骤3中计算出来的功率谱密度估计值的基础上选取(0-f)khz,平均分成m个频段,这m个频段包含信号90%以上的能量,计算出m个频段上的功率,目的是减少用
于检测非平稳飞行姿态数据量和各条谱线之间的可变性:
[0012][0013]
在公式中,b[k](w)表示是由频率fa和fb定义的k频段的平均功率,k=m(下同),fa和fb表示所计算的m个频段的任意一个频段的起始频率和终止频率,δf(hz)是频率分辨率;
[0014]
步骤5、为了量化非平稳飞行姿态引起的声传递率差异,用包含信号主要能量的频带功率估计值减去平均基线,该平均基线对应于在相同测试情况下(平稳飞行姿态)由麦克风测量的平稳飞行姿态数据子集的平均频带功率:
[0015][0016]
在公式中,δbd[k](单位w)是不同飞行姿态角度d的频带功率差,bd[k]是不同飞行姿态角度频带功率估计值,是平稳飞行姿态的数据子集平均频带功率估计;
[0017]
步骤6、频带功率差异被卷成一个单一的度量标准,用于检测和区分飞行姿态角度,即绝对差异之和,简单地计算为每个数据块的频带功率差异的绝对值之和(sad):
[0018][0019]
在公式中,sadd是不同飞行姿态角度数据的绝对差值之和;
[0020]
步骤7、对sad值进行异常值分析,在整个数据集中,对小于或大于3倍的中值绝对偏差的数据点进行去除,来达到去除异常值的目的;
[0021]
步骤8、存储最终的一组经处理且无异常值的sad值,用于随后与试验的sad数据子集进行比较,以检测和区分飞机飞行平稳与非平稳姿态。建立了一个飞行姿态检测阈值,该阈值等于平稳飞行姿态数据子集平均值以上的三个标准偏差,用于将超过该阈值的sad值分类为非平稳飞行姿态。
[0022]
在上述的各步中,本发明中的步骤2如何对植保无人机飞行的姿态声信号进行降噪,还包括以下具体技术方案:
[0023]
步骤2.1、对所采集的n点时域信号x[n](在这里n=1、2、3
…
)通过低通缩放滤波器g和高通小波滤波器h分别滤波信号,n点时域信号被分解成小波包(节点)的第一级(j=1),随后用2倍进行下采样。结果得到n/2点小波包节点w1;0和w
1;1
对应于频率范围分别为[0,fs/4]和[fs/4,fs/2]。通过对前一阶段的小波包系数(w
1;0
和w
1;1
)应用相同的滤波和下采样操作,获得频域中更精细的分辨率。结果是对应于原始信号的时间信息的四个n/4点小波包被分成四个等宽频带,重复该过程,直到能够较好的区分出噪声信号和感兴趣的信号;
[0024]
步骤2.2、为每个终端节点计算信噪比snrk,并且信噪比是相对于频率来估计的:
[0025][0026]
snrk是小波包节点w
l,k
频率子带对应的信噪比,w
l,k
表示小波包分解的终端节点系数,l表示分解的层数,k表示第l层的第k个节点;w
l,k,n
是对应于小波包节点w
l,k
的纯噪声区间的系数,n表示纯噪声节点;
[0027]
步骤2.3、仅考虑纯噪声区间的系数,为每个终端节点计算噪声标准偏差:
[0028][0029]
σ
l,k
是在最大分解级别l的第k个节点的噪声标准偏差,w
l,k
表示小波包分解的终端节点系数,l表示分解的层数,k表示第l层的第k个节点;
[0030]
步骤2.4、基于测量的时间响应的信噪比调整所选阈值的风险,风险的阈值是依赖于使用birge和massart’s的自适应密度估计策略计算的,该策略从风险函数的最小值确定未知密度的最佳投影,该策略易于关联并应用于小波阈值,其中确定未知信号小波系数投影的最佳近似值,通过计算,确定产生对应于最佳近似的小波系数的阈值:
[0031][0032]ws
(k)是按降序排序的所有小波系数绝对值,α是稀疏性惩罚项,n是小波系数总数,t是当前索引,即当前子集中的系数;可以观察到,风险函数代表小波系数子集和处罚函数之间的折衷,处罚函数取决于样本空间的大小和稀疏性参数;
[0033]
步骤2.5、由步骤(4)可知,增加或减少稀疏性参数α(风险)将分别增加或减少阈值化后小波系数的稀疏性,对应于风险函数最小值的t
min
与产生小波系数最佳投影的阈值有关:
[0034]
t
bm
(α)=ws(t
min
)
[0035]
t
bm
(α)是对于给定的惩罚系数α从birg
é‑
massart策略中得到的阈值;
[0036]
步骤2.6、对于每个终端节点,对应于纯噪声区间的系数被设置为0,并且剩余的系数(信号和噪声)被在步骤(2.4)和(2.5)中计算的相应阈值来抑制;
[0037]
步骤2.7、通过将逆小波包变换应用于改善的系数来重构增去噪的时间响应。
[0038]
对于小波包降噪参数的衡量标准,我们通过信噪比改善、感兴趣信号去噪后能量保留百分比和小波系数熵三个质量评估指标来评估每个小波参数对去噪性能的有效性。三个指标中的每一个都被特别选择来量化近似保留干净信号能量的程度,即保留能量的百分比以及近似增强干净信号与噪声的可区分性,即信噪比改善和熵的程度;
[0039]
a、信噪比改善
[0040]
信噪比被定义为感兴趣的信号功率和噪声功率之间的比率。为了量化信噪比的改善,必须量化应用wpd算法后的信噪比。为了精确地估计降噪后的信噪比(后验信噪比),将wpd过程应用于没有任何附加噪声的干净信号,重构响应仅对应于从wpd过程保留的信号内容,标记为去噪的干净信号;此外,通过将wpd过程应用于添加了噪声的干净信号而获得的重构响应中减去去噪的干净信号,以获得去噪后剩余的噪声含量;现在,信噪比改善可以适当地计算如下:
[0041][0042]
在公式中,δsnr是信噪比改善,snr
p
是后验信噪比,snri是初始信噪比,x
sd
是没有添加噪声的去噪响应,xd是添加噪声的去噪响应,xs是感兴趣的信号,xn是噪声信号。较大的δsnr值对应于更好的去噪性能;
[0043]
b、信号能量保留百分比
[0044]
仅对应于感兴趣信号保留能量的百分比被计算为没有添加噪声的去噪响应的l-2范数和原始感兴趣信号之间的比率:
[0045][0046]
在公式中,l2r是l-2范数比。l2r的理想值是1,这意味着在wpd进程中没有损失任何能量。需要仔细检查δsnr和l2r,以确保在去除噪声和保留能量之间保持理想的平衡;
[0047]
c、小波系数熵
[0048]
熵作为量化小波包系数无序度(值的分布有多均匀/不均匀)的一种度量,可以按如下方式计算:
[0049][0050]
在公式中,q
j,k
是在j层上的第k个节点的熵,w
j,k
表示在j层上的第k个节点的小波系数,t对应于小波包节点的系数索引,tj是第j层的小波包节点中的系数数量。当系数的值均匀分布时,熵会很大,较少的大值信号系数期望对应于较小的熵值,从而增强将感兴趣的信号和瞬态噪声事件与环境噪声区分开来的能力。
[0051]
与传统的小波包降噪技术相比,本发明的有益效果是:本发明所采用的自适应小波包降噪技术,该方法能够适应复杂的噪声环境中工作的植保无人机,此外,由于大量的参数(例如小波函数、分解级别、阈值选择方法等),而对于这些参数的选定没有一个确切的方法。本发明设计了一个可复制的算法,以帮助选择适当的参数,以适应各植保无人机在带宽变化不均匀的噪声环境下的飞行姿态的监测。
附图说明
[0052]
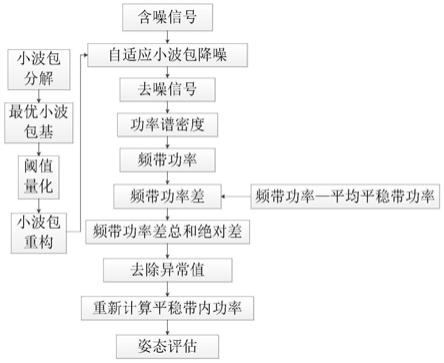
图1是本发明的植保无人机避障飞行姿态监测方法结构框图;
[0053]
图2是植保无人机飞行姿态声信号的小波包分解与重构图;
[0054]
图3是植保无人机飞行姿态声信号的自适应小波包降噪流程图;
[0055]
图4是植保无人机平稳与非平稳飞行状态的声信号处理程序示意图。
具体实施方式
[0056]
下面结合附图说明与具体实施方式对本发明做进一步详细描述。
[0057]
本发明提供了一种基于自适应小波包降噪的植保无人机飞行姿态的监测方法。具体通过对植保无人机避行姿态信号进行自适应小波包降噪,来抑制外部噪声环境的干扰,从而提高对植保无人机飞行姿态的监测识别。
[0058]
本发明的目的是通过以下技术方案来实现的,基于自适应小波包降噪的植保无人机飞行姿态的监测,实现步骤如下:
[0059]
本文选用的是“耕耘一号”农业植保无人机,型号为3wwdz-10c为研究对象,主要对俯仰角,横滚角,偏航角进行监测。
[0060]
步骤1、将声压传感器放置在无人机的正下方来采集声压信号,本文应用了无人机在平稳飞行、俯仰角(-15
°
、-8
°
、8
°
、15
°
),横滚角(-10
°
、-5
°
、5
°
、10
°
),偏航角(-40
°
、-20
°
、20
°
、40
°
)的工作姿态下的声压信号,每种姿态采集300组数据,150组为训练样本,150组为测试样本。
[0061]
步骤2、对植保无人机采集到的信号数据进行自适应小波包降噪,附图2和图3为小波包分解示意图和自适应小波包降噪流程图。
[0062]
步骤2.1、对所采集的时域信号x[n](在这里n=1、2、3
…
)进行小波包降噪时,对于小波包变换的分解等级,我们通过比较信噪比的改善(δsnr)和保留的信号能量(l2r)之间的折衷来确定所选择的分解级别,在初始信噪比为-5db,信噪比改善(δsnr)为11.8db下能够保持至少90%信号能量的分解水平始终为7级。小波函数是基于较信噪比的改善(δsnr)和保留的信号能量(l2r)和小波系数熵三个指标来选择的,在初始信噪比为6db时产生最大的l2r(大于90%)、最大的δsnr(13.96db)和最低的熵(4.84)的小波函数为db35,因此在自适应wpd算法中我们选择的小波函数为db35,分解层数为7层。
[0063]
步骤2.2、对于每个终端节点降噪阈值的选择,我们是通过划分初始信噪比,并且用能量保持l2r≥90%和信噪比改善的衡量标准来选择的。具体来说,当初始信噪比在(-∞,-4)db之间时,tbm(1)产生最佳信噪比改善;当介于(-4,-3)db之间时,tbm(2)产生最佳信噪比改善;当介于(-3,-2)db之间时,tbm(3)产生最佳信噪比改善;当介于(-2,0)db之间时,tbm(4)产生最佳信噪比改善;当介于(0,∞)db之间时,tbm(5)产生最佳信噪比改善。选用上述阈值对终端节点进行降噪以保持感兴趣信号的完整性。
[0064]
步骤2.3、对降噪后的信号进行重构。
[0065]
步骤3、使用welch’s方法估计每个采集信号块的声学特性,以帮助减少频谱泄漏,其中welch’s方法为:
[0066][0067]
在公式中,psd[f](w/hz)表示f
th
(hz)频率分量的功率谱密度估计值,h[n]表是汉明窗函数。x[n](pa)表是采集的时域信号,如附图4步骤3所示。
[0068]
步骤4、在步骤3中计算出来的功率谱密度估计值的基础上选取0-20khz,平均分成30个频段,这30个频段包含信号90%以上的能量,计算出30个频段上的功率,目的是减少用于检测非平稳飞行姿态数据量和各条谱线之间的可变性,每个姿态重复150次:
[0069][0070]
在公式中,b[k](w)表示是由频率fa和fb定义的k频段的平均功率,k=30,fa和fb表示所计算的30个频段的任意一个频段的起始频率和终止频率,δf(hz)是频率分辨率,如附图4步骤4所示。
[0071]
步骤5、为了量化非平稳飞行姿态引起的声传递率差异,用平均基线减去频带功率估计值,该平均基线对应于在相同测试条件下(平稳飞行姿态)由麦克风测量的平稳飞行姿态数据子集的平均频带功率,计算方法与非平稳飞行姿态的平均频带功率相同,都按照步骤4进行计算,然后用每个数据块计算出来非平稳飞行姿态的30个频段的功率对应的减去平稳飞行姿态的30个频段的功率,每个飞行姿态重复150次:
[0072][0073]
在公式中,δbd[k](w)是不同飞行姿态d(俯仰,横滚,偏航)的频带(band)功率差,bd
[k]是非平稳飞行姿态的频带功率估计值,是平稳飞行姿态的数据子集的平均频带功率估计,所谓的平均频带功率估计就是150组数据的平均值,如附图4步骤5所示。
[0074]
步骤6、利用步骤5计算出来的不同飞行姿态(各150组)与平稳飞行姿态30个频段功率差进行加绝对值在求和,如下式所示:
[0075][0076]
在公式中,sadd是不同飞行姿态数据的绝对差值之和,k=30,每个姿态有150个绝对差值之和sadd数据点,构成不同飞行姿态绝对差之和数据曲线。如附图4步骤6所示。
[0077]
步骤7、利用步骤6的不同飞行姿态绝对差之和数据曲线,计算出数据的中值曲线,3倍的中值绝对偏差数据曲线和-3倍中值绝对偏差数据曲线,对于不再中值偏差曲线内的点进行去除,如附图4步骤7所示。
[0078]
步骤8、存储最终的一组经处理且无异常值的sad值,用于随后与平稳飞行状态的sad数据子集进行比较,以检测和区分飞机飞行平稳与非平稳姿态。建立了一个飞行姿态检测阈值,该阈值等于平稳飞行姿态数据子集平均值以上的三个标准偏差,用于将超过该阈值的sad值分类为非平稳飞行姿态,如附图4的步骤8所示。
[0079]
部分测试结果如下表所示:
[0080]
数据集训练样本(组)测试样本(组)监测准确率平稳飞行状态150150100%俯仰角-15
°
15015097.25%俯仰角15
°
15015096.65%横滚角-10
°
15015095.36%横滚角-10
°
15015096.44%偏航角
‑‑
20
°
15015089.65%偏航角20
°
15015087.31%
[0081]
如上表所示,提出的基于自适应小波包降噪的植保无人机飞行态监测方法,能够很好的完成植保无人机在带宽变化不均匀的噪声环境下的喷雾作业飞行姿态监测,并且还具有小样本优势。本发明可以实时监测植保无人机工作室的飞行姿态,为提高喷雾效率和作业质量提供依据,避免资源浪费。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
